具有偏转器的传感器壳体的制作方法
1.本公开涉及车辆中的传感器壳体。
背景技术:
2.车辆可以包括用于自主或半自主操作车辆的一个或多个系统,例如,用于速度控制、车道保持等的高级驾驶员辅助系统(adas)。
3.用于自主或半自主地操作车辆的一个或多个系统可以包括各种对象检测传感器,诸如已知的用于向车辆计算机提供数据的传感器。例如,(一个或多个)光探测和测距(激光雷达)车辆传感器等可以设置在车辆顶部、车辆前挡风玻璃后面、车辆周围等,其提供车辆周围对象的相对位置、尺寸和形状。作为另一个示例,一个或多个雷达车辆传感器可以固定到车辆保险杠,可以提供数据以提供对象、第二车辆等相对于车辆位置的位置。一个或多个系统还可以替代地或另外例如包括(一个或多个)相机车辆传感器(例如,前视、侧视等),从而提供来自车辆周围区域的图像。
技术实现要素:
4.一种总成包括壳体和传感器,所述传感器由壳体支撑。所述总成包括偏转器,所述偏转器由传感器前方的壳体支撑。偏转器和传感器限定其间的间距。所述间距向壳体外部的周围环境开放。偏转器包括透明材料,所述透明材料准许光穿过偏转器。
5.所述总成可以包括透明屏蔽件,所述透明屏蔽件由壳体支撑在传感器与偏转器之间。
6.所述总成可以包括喷嘴,所述喷嘴由壳体支撑在偏转器与传感器之间,所述喷嘴面向传感器。
7.偏转器可以是弓形的。
8.偏转器可以包括相对的横向端部,所述相对的横向端部在偏转器的横向中心的后方。
9.偏转器可以从壳体的顶部表面向上延伸。
10.壳体可以限定腔室,并且偏转器可以是可在腔室外部的展开位置与腔室内的收起位置之间移动。
11.所述总成可以包括轨道,所述轨道由壳体支撑,偏转器可沿着轨道在展开位置与收起位置之间移动。
12.所述总成可以包括致动器,所述致动器可操作地联接到偏转器,使得致动器的致动移动偏转器。
13.所述总成可以包括与致动器通信的计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由处理器执行以响应于确定支撑所述总成的车辆正以高于阈值速度的速度行驶而将偏转器从收起位置移动到展开位置。
14.一种总成包括壳体,所述壳体限定腔室。所述总成包括传感器,所述传感器由壳体
支撑。所述总成包括偏转器,所述偏转器由传感器前方的壳体支撑,所述偏转器可在腔室外部的展开位置与腔室内的收起位置之间移动。
15.所述总成可以包括轨道,所述轨道由壳体支撑,偏转器可沿着轨道在展开位置与收起位置之间移动。
16.所述总成可以包括致动器,所述致动器可操作地联接到偏转器,使得致动器的致动移动偏转器。
17.所述总成可以包括与致动器通信的计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由处理器执行以响应于确定支撑所述总成的车辆正以高于阈值速度的速度行驶而将偏转器从收起位置移动到展开位置。
18.所述总成可以包括透明屏蔽件,所述透明屏蔽件由壳体支撑在传感器与偏转器之间。
19.所述总成可以包括喷嘴,所述喷嘴由壳体支撑在偏转器与传感器之间,所述喷嘴面向传感器。
20.偏转器可以是弓形的。
21.偏转器可以包括相对的横向端部,所述相对的横向端部在偏转器的横向中心的后方。
22.处于展开位置的偏转器可以从壳体的顶部表面向上延伸。
附图说明
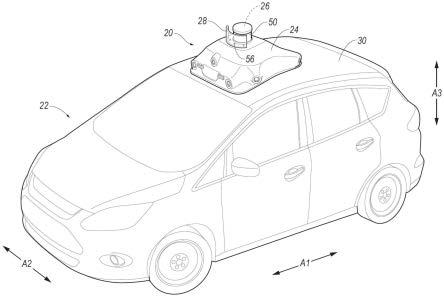
23.图1是具有传感器总成的车辆的透视图。
24.图2是偏转器处于展开位置的传感器总成的透视图。
25.图3是传感器总成的俯视图。
26.图4是其中偏转器处于展开位置并且沿着图3的线4-4截取的传感器总成的横截面视图。
27.图5是偏转器处于收起位置的传感器总成的透视图。
28.图6是其中偏转器处于收起位置并且沿着图3的线4-4截取的传感器总成的横截面视图。
29.图7是车辆的部件的框图。
具体实施方式
30.参考图1至图6,例如用于收集在车辆22的自主操作中使用的数据的总成20包括壳体24。总成20包括传感器26,所述传感器由壳体24支撑。总成20包括偏转器28,所述偏转器由传感器26前方的壳体24支撑。偏转器28和传感器26限定其间的间距s1。间距s1向壳体24外部的周围环境开放。偏转器28包括透明材料,所述透明材料准许光穿过偏转器28。穿过偏转器28的光可以被传感器26检测到。
31.车辆22可以是任何合适类型的地面车辆,例如,乘用汽车或商用汽车,诸如轿车、双门轿车、卡车、运动型多功能车、跨界车、面包车、小型货车、出租车、公共汽车等。
32.在本技术中,相对的车辆取向和方向(例如,顶部、底部、前部、后部、外侧、内侧、向内、向外、横向、左、右等)是从坐在车辆22中面向前方(例如,朝向车辆22的前方仪表面板
和/或前方挡风玻璃)的乘员的视角来看。车辆22的前向方向是当车辆22在车辆22的车轮笔直的情况下进行向前驾驶时车辆22的移动方向。相对于总成20的取向和方向是关于总成20被车辆22支撑时给出的,如下文所述和图中所示。
33.车辆22限定在车辆22的前部与后部之间延伸的纵向轴线a1。车辆22限定在车辆22的左侧与右侧之间延伸的车辆横向轴线a2。车辆22限定在车辆22的顶部与底部之间延伸的竖直轴线a3。纵向轴线a1、车辆横向轴线a2和竖直轴线a3相对于彼此垂直。
34.车辆22可以是自主车辆。计算机58可以被编程为完全或在较小程度上独立于人类驾驶员的干预来操作车辆22。计算机58可以被编程为至少部分地基于从传感器26接收到的数据来操作推进系统、制动系统、转向系统和/或其他车辆系统。出于本公开的目的,自主操作意味着计算机58在没有人类驾驶员输入的情况下控制推进装置、制动系统和转向系统;半自主操作意味着计算机58控制推进系统、制动系统和转向系统中的一者或两者,并且人类驾驶员控制其余部分;并且非自主操作意味着人类驾驶员控制推进系统、制动系统和转向系统。
35.车辆22可以包括车身。车身包括部分限定车辆外部的车身面板。车身面板可以呈现a级表面,例如,暴露在客户视线内且没有不美观的瑕疵和缺陷的精加工表面。车身面板包括例如车顶30等。
36.如图4和图6所示,壳体24限定(例如,包封)腔室32。腔室32可以在壳体24的下部34与上部36之间。上部36可以覆盖下部34的顶部并且安装在其上。上部36和下部34可以是塑料或任何合适的材料。下部34可以例如用紧固件等固定到上部36。壳体24(例如,下部34)可附接到车辆22,例如可附接到车辆22的车身面板中的一个。传感器26由壳体24支撑和/或设置在所述壳体中。壳体24可以包封并且保护传感器26的操作部件。壳体24可以被成形为可附接到车顶30,例如,下部34可以具有与车顶30的轮廓匹配的形状。壳体24可以附接到车顶30,这可以为传感器26提供车辆22周围区域的无障碍视野fov。
37.传感器26检测对象。更具体地,传感器26可以是对象检测传感器。传感器26可以包括各种装置,诸如已知的用于向计算机58提供数据的装置。对象检测传感器26的示例可以包括(一个或多个)光检测和测距(激光雷达)传感器,所述光检测和测距传感器提供车辆22周围对象的相对位置、大小和形状。对象检测传感器26还可以替代地或另外包括例如(一个或多个)相机车辆传感器(例如,前视、侧视等),从而提供来自车辆22周围区域的图像。在本公开的上下文中,对象是可以由传感器26可检测的物理现象(例如,光或其他电磁波,或声音等)表示的物理(即,材料)物品。因此,车辆以及包括以下讨论的其他物品都落在本文的“对象”的定义内。
38.当车辆22以高于阈值速度的速度行驶时,偏转器28偏转例如传感器26周围的空气。例如,偏转器28与环境空气之间的相对移动可以将此类空气推动到传感器26的上方和外侧。推动传感器26周围的空气减少了可能干扰传感器26收集数据的水和其他碎屑的量。例如,推动传感器26周围的空气可以降低此类碎屑撞击传感器26和/或透明屏蔽件50的可能性,所述透明屏蔽件由壳体24支撑在传感器26与偏转器28之间。
39.偏转器28由传感器26前方的壳体24支撑。换句话说,偏转器28可以在传感器26与车辆22的前部之间。当车辆22向前行驶(例如,以高于阈值速度的速度)时,传感器26前方的偏转器28使得偏转器28能够推动传感器26周围的空气。
40.偏转器28可以包括透明材料,所述透明材料准许光穿过偏转器28。穿过偏转器28的透明材料的光可以被传感器26检测到。偏转器28可以是准许可被传感器26检测到的光穿过的玻璃、塑料或其他合适的透明材料。
41.偏转器28可以在图2和图4中示出的展开位置与图5和图6中示出的收起位置之间移动。处于展开位置的偏转器28在腔室32外部,例如,用于偏转传感器26周围的环境空气。处于收起位置的偏转器28在腔室32内,例如在壳体24的下部34与壳体24的上部36之间。偏转器28在腔室32中保护了偏转器28。壳体24中的偏转器28在传感器26的视野fov外部。偏转器28可以通过壳体24中的狭槽等(例如,在上部36中)在展开位置与收起位置之间移动。
42.参考图2和图4,例如在展开位置,偏转器28从壳体24的顶部表面40向上延伸。顶部表面40可以与腔室32相对,即背向所述腔室。例如,偏转器28可以从上部36沿着竖直轴线a3并且远离腔室32延伸。
43.如图4所示,偏转器28和传感器26例如沿着横向轴线限定其间的间距s1。例如,间距s1向壳体24外部的周围环境开放,使得环境空气不受抑制地流入和流出偏转器28与传感器26之间的间距s1。间距s1在腔室32外部并且与所述腔室隔离。
44.参考图3,偏转器28可以是弓形的,例如,当从上面看时,具有弯曲的轮廓。弓形形状可以有助于高效地引导传感器26周围的空气。偏转器28可以包括相对的横向端部42,所述相对的横向端部例如沿着纵向轴线a1在偏转器28的横向中心44的后方。例如,在横向中心44处与偏转器28相切的线可以平行于车辆横向轴线a2,偏转器28可以从横向中心44向横向端部42向外和向后延伸和弯曲。
45.返回到图2和图4至图6,一个或多个轨道46可以支撑偏转器28并且使所述偏转器能够在收起位置与展开位置之间移动。换句话说,偏转器28可以沿着轨道46在展开位置与收起位置之间移动。轨道46可以沿着竖直轴线a3伸长。轨道46可以包括导轨、通道、凹槽、唇部等,所述导轨、通道、凹槽、唇部等沿着竖直轴线a3伸长。导轨、通道、凹槽、唇部等可以准许例如偏转器28沿着竖直轴线a3移动,并且抑制沿着纵向轴线a1和车辆横向轴线a2移动。轨道46可以由壳体24支撑。例如,轨道46可以经由紧固件、焊接等固定到壳体24的上部36,并且朝向下部34向下延伸。
46.总成20可以包括致动器48,所述致动器可操作地联接到偏转器28,使得致动器48的致动例如沿着轨道46将偏转器28从展开位置移动到收起位置,并且反之亦然。致动器48可以固定到轨道46、壳体24或任何合适的结构中的一者。致动器48可以包括适于沿着轨道46移动偏转器28的马达、减速齿轮、蜗轮、齿条和小齿轮、滑轮、带、链条和/或任何其他机电结构和/或液压结构。例如,致动器48可以是致动以改变致动器48的端部之间的长度的线性致动器,例如,线性伺服型、包括螺纹轴和孔的螺旋型、包括活塞和气缸的液压型等。此类致动器48可以将一端固定到偏转器28并且将相对端固定到轨道46、壳体24等中的一者。致动器48可以响应来自计算机58的命令来移动偏转器28。尽管仅示出了一个致动器48,但是总成20可以包括另外的致动器48,例如,在轨道46中的每一个处具有一个致动器48。
47.透明屏蔽件50例如沿着纵向轴线a1在传感器26与偏转器28之间。透明屏蔽件50保护传感器26的部件免受可能损坏传感器26的灰尘、水和其他对象的影响。透明屏蔽件50准许光穿过到达传感器26。透明屏蔽件50可以是透镜,例如,透明屏蔽件50可以将光聚焦到传感器26上。透明屏蔽件50可以由玻璃、塑料或其他合适的透明材料形成。透明屏蔽件50可以
由传感器26支撑,例如,作为传感器26的部件。透明屏蔽件50可以由壳体24支撑,例如固定到上部36。如图4和图6中所示,透明屏蔽件50可以包括面向传感器26的内表面52和背向传感器26的外表面54。内表面52可以与环境空气隔离。例如,内表面52可以面向腔室32。外表面54不与环境空气隔离,例如,外表面54可以背向腔室32并且暴露于环境空气。
48.总成20可以包括喷嘴56,所述喷嘴由壳体24支撑在偏转器28与传感器26之间。例如,喷嘴56可以固定到壳体24的上部36。喷嘴56面向传感器26,即,使得从喷嘴56喷射的流体在传感器26的视野fov处流动或跨所述视野流动。例如,来自喷嘴56的流体可以被引向透明屏蔽件50。喷嘴56可以例如经由供应管线与流体贮器流体连通。泵可以将流体从流体贮器通过供应管线推动到喷嘴56。
49.参考图7,计算机58包括诸如已知的处理器和存储器。存储器包括一种或多种形式的计算机58可读介质,并且存储可由计算机58执行以用于执行各种操作(包括如本文所公开的操作)的指令。例如,计算机58可以是具有如上所述的处理器和存储器的通用计算机,和/或可以包括用于特定功能或功能集的电子控制单元(ecu)或控制器等,和/或可以包括专用电子电路,所述专用电子电路包括针对特定操作而制造的asic,例如用于处理传感器数据和/或传送传感器数据的asic。在另一个示例中,计算机58可以包括fpga(现场可编程门阵列),所述fpga是被制造为可由用户配置的集成电路。通常,在电子设计自动化中使用诸如vhdl(超高速集成电路硬件描述语言)的硬件描述语言来描述诸如fpga和asic的数字和混合信号系统。例如,asic是基于制造前提供的vhdl编程而制造的,而fpga内部的逻辑部件可以基于例如存储在电连接到fpga电路的存储器中的vhdl编程而配置。在一些示例中,计算机58中可以包括(一个或多个)处理器、(一个或多个)asic和/或fpga电路的组合。存储器可以是任何类型,例如,硬盘驱动器、固态驱动器、服务器或任何易失性或非易失性介质。存储器可以存储从传感器26发送的所收集的数据。存储器可以是与计算机58分离的装置,并且计算机58可以经由车辆22中的网络(例如通过can总线、无线网络等)检索由存储器存储的信息。替代地或另外,存储器可以是计算机58的一部分,例如,作为计算机58的存储器。计算机58可以包括编程,以操作车辆22的制动、推进(例如,通过控制内燃发动机、电动马达、混合动力发动机等中的一者或多者来控制车辆22中的加速)、转向、气候控制、内部灯和/或外部灯等中的一者或多者,以及确定是否及何时由计算机58而不是由人类操作者来控制这类操作。另外,计算机58可以被编程为确定人类操作员是否以及何时控制此类操作。计算机58可以包括或可通信地耦合到(例如,经由车辆通信网络,诸如如下文进一步描述的通信总线)多于一个处理器,例如,包括在诸如传感器26、电子控制器单元(ecu)等的部件中,所述部件包括在车辆22中,用于监测和/或控制各种车辆部件,例如,动力传动系统控制器、制动控制器、转向控制器等。计算机58通常被布置用于车辆通信网络上的通信,所述车辆通信网络可以包括车辆22中的总线,诸如控制器局域网(can)等,和/或其他有线和/或无线机制。替代地或另外,在计算机58实际上包括多个装置的情况下,车辆22通信网络可以用于在本公开中表示为计算机58的装置之间的通信。此外,如下所述,各种控制器和/或传感器26可以经由车辆22通信网络向计算机58提供数据。
50.车辆通信网络可以包括常规的车辆通信总线,诸如can总线、lin总线等,和/或其他有线和/或无线技术,例如以太网、蜂窝、低功耗(ble)等。经由网络、总线和/或其他有线或无线机制(例如,车辆22中的有线或无线局域
网)。因此,计算机58等可以向车辆22中的各种装置(例如ecu、控制器、致动器48、传感器26、其他车辆传感器(诸如速度传感器)等)传输消息和/或从所述各种装置接收消息。
51.计算机58被编程为,即,存储器存储指令,所述指令可由处理器执行,以响应于确定车辆22正以高于阈值速度的速度行驶,而将偏转器28从收起位置移动到展开位置。计算机58可以响应于确定车辆22在以低于阈值速度的速度行驶,而将偏转器28从展开位置移动到收起位置。
52.计算机58可以通过通过车辆通信网络向致动器48传输命令,例如指定致动器48的特定长度或位置,来将偏转器28移动到展开位置或收起位置。
53.计算机58可以通过将车辆22的检测速度与速度阈值进行比较来确定车辆22是在以高于阈值速度还是低于阈值速度的速度行驶。计算机58可以用来自车辆22速度传感器26等的经由车辆通信网络接收到的数据来检测车辆22的速度。
54.阈值速度是环境空气在传感器26周围被推动的速度。阈值速度可以通过经验测试(例如,总成20的风洞或计算机58模拟测试)来确定并且指示偏转器28推动传感器26周围的空气时的风速。
55.已经以说明性方式描述了本公开,并且应理解,已经使用的术语意图本质上是描述性词语而非限制性词语。鉴于以上教导,本公开的许多修改和变化是可能的,并且本公开可以不同于具体描述的其他方式来实践。本发明意图仅受以下权利要求的限制。
56.根据本发明,提供了一种总成,其具有:壳体;传感器,其由壳体支撑;偏转器,其由传感器前方的壳体支撑;偏转器和传感器限定其间的间距,所述间距向壳体外部的周围环境开放;并且偏转器包括透明材料,所述透明材料准许光穿过偏转器。
57.根据实施例,本发明的特征还在于透明屏蔽件,所述透明屏蔽件由壳体支撑在传感器与偏转器之间。
58.根据实施例,本发明的特征还在于喷嘴,所述喷嘴由壳体支撑在偏转器与传感器之间,所述喷嘴面向传感器。
59.根据实施例,偏转器是弓形的。
60.根据实施例,偏转器包括相对的横向端部,所述相对的横向端部在偏转器的横向中心的后方。
61.根据实施例,偏转器从壳体的顶部表面向上延伸。
62.根据实施例,壳体限定腔室,并且偏转器可在腔室外部的展开位置与腔室内的收起位置之间移动。
63.根据实施例,本发明的特征还在于轨道,所述轨道由壳体支撑,偏转器可沿着轨道在展开位置与收起位置之间移动。
64.根据实施例,本发明的特征还在于致动器,所述致动器可操作地联接到偏转器,使得致动器的致动移动偏转器。
65.根据实施例,本发明的特征还在于与致动器通信的计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由处理器执行以响应于确定支撑总成的车辆正以高于阈值速度的速度行驶而将偏转器从收起位置移动到展开位置。
66.根据本发明,提供了一种总成,其具有壳体,所述壳体限定腔室;传感器,其由壳体支撑;以及偏转器,其由传感器前方的壳体支撑,所述偏转器可在腔室外部的展开位置与腔
室内的收起位置之间移动。
67.根据实施例,本发明的特征还在于轨道,所述轨道由壳体支撑,偏转器可沿着轨道在展开位置与收起位置之间移动。
68.根据实施例,本发明的特征还在于致动器,所述致动器可操作地联接到偏转器,使得致动器的致动移动偏转器。
69.根据实施例,本发明的特征还在于与致动器通信的计算机,所述计算机具有处理器和存储器,所述存储器存储指令,所述指令可由处理器执行以响应于确定支撑总成的车辆正以高于阈值速度的速度行驶而将偏转器从收起位置移动到展开位置。
70.根据实施例,本发明的特征还在于透明屏蔽件,所述透明屏蔽件由壳体支撑在传感器与偏转器之间。
71.根据实施例,本发明的特征还在于喷嘴,所述喷嘴由壳体支撑在偏转器与传感器之间,所述喷嘴面向传感器。
72.根据实施例,偏转器是弓形的。
73.根据实施例,偏转器包括相对的横向端部,所述相对的横向端部在偏转器的横向中心的后方。
74.根据实施例,处于展开位置的偏转器从壳体的顶部表面向上延伸。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1