一种针对铰接车辆的纵向滑移率估计方法
1.本发明涉及自动驾驶车辆状态估计领域,特别是指一种针对铰接轮式车辆的纵向滑移率估计方法。
背景技术:
2.铰接轮式工程车辆主要分为前后车体两部分,中间由刚性铰接体连接,前后车体之间由液压缸驱动进行折腰转向,被广泛应用于工地、矿山等非结构场景。车辆状态的准确获取对铰接轮式车辆的智能化,自动化及车辆安全必不可少,铰接车辆的路径跟踪控制、安全状态检测等诸多应用均不同程度依赖横摆角速度、铰接角速度、前后车体速度、滑移率等状态参数。
3.而其中,纵向滑移率在铰接车辆动力学辨识及安全控制方面具有举足轻重的作用:一方面,纵向滑移率与轮胎力建模高度相关,是基于动力学建模必不可少的参数,另一方面纵向滑移率与路面附着系数对应,通过对滑移率进行控制,可以使轮胎工作在附着特性稳定区,保障车辆安全。
4.但是,车辆纵向滑移率本身往往不能在符合实用性的前提下直接通过测量获得,因此需要借助状态估计技术进行间接估计。目前基于模型预测的车辆状态估计方法研究仍然主要集中应用于普通车辆,而铰接车辆动力学模型具有高度的非线性,涉及的动力学参数间也存在极强的耦合性,暂时缺乏一种可以准确描述铰接轮式车辆动力学特性的动力学模型,因而凭借构建车辆动力学模型对对象纵向滑移率进行估算存在一定的挑战。
5.可见,当前的铰接轮式车辆状态获取仍然存在不足,无法精准估计车辆纵向滑移率。
技术实现要素:
6.本发明的主要目的在于克服铰接轮式车辆纵状态估计问题中的上述缺陷,提出一种针对铰接轮式车辆纵向滑移率的估计方法。
7.本发明采用如下技术方案:
8.本发明公开一种针对铰接车辆的纵向滑移率估计方法,其特征在于从垂向载荷、轮胎力、动力学模型等环节完整考虑铰接轮式车辆的动力学特征,借助unscented kalman方法克服因为铰接轮式车辆模型的强非线性而可能引起的估计算法失真问题,估计方法包括以下步骤:
9.1)估计器数据初始化
10.2)根据铰接轮式车辆的动力学特性,搭建二自由度车辆模型;
11.3)采用unscented kalman filter滤波算法,对车辆速度状态信息进行估计。
12.4)根据铰接轮式车辆的运动学特性,借助估计的速度状态信息及轮速信息估算铰接轮式车辆的纵向滑移率。
13.所述车辆状态初始化公式表示为:
14.[x,y]'=[n,n]
[0015]
其中x指代车辆总质心纵向速度,y指代车辆总质心横向速度,n指代一个极小但不等于0的常数。
[0016]
所述状态协方式初始化公式表示为:
[0017][0018]
其中p0指代初始的状态协方差,e[]代表期望值计算,x0指代初始时刻的状态向量矩阵真值,指代为初始时刻的状态向量矩阵x0的估计值,x0表示如下:
[0019]
x0=[x,y]'
[0020]
所述的二自由度动力学模型,具体如下:
[0021][0022][0023]
其中v
x
表示整车质心纵向速度,vy表示整车质心横向速度,表示整车质心纵向加速度,表示整车质心横向加速度。f
xii
与f
yii
代指纵向和横向轮胎力,ii代表对应车轮的前后(f/r)与左右(l/r)。tf及tr分别代指车辆前后轮的轮距,γ表示偏航率,δ为铰接转角。l
fb
、l
rb
分别指前车体质心、后车体质心到铰接轴距离,m为整车质量,m
fb
、m
rb
为分别表示前车体质量与后车体质量。
[0024]fxii
与f
yii
表示为:
[0025][0026][0027][0028][0029]
其中σ表示纵向滑移率,α表示侧偏角,λ
t
为一运算过程参数,c
σ
、c
α
分别表示轮胎纵向和横向刚度,μ表示地面摩擦系数,η为一运算过程参数,fz表示轮胎的垂向载荷。
[0030]
二自由度动力学模型种所述垂向载荷fz具体表示如下:
[0031][0032][0033][0034][0035]
其中l
fr
、l
fl
、lr分别代指车辆前右轮、前左轮、及后轮到车辆质心的纵向距离,w
fr
、w
fl
则代指车辆两前轮到车辆铰点的横向距离,g表示重力加速度,ff表示空气阻力,f
zd
表示铰点垂向载荷,tr表示后轮轮距,mf和mr分别表示前后车体质量,a
yf
和a
yr
分别表示前后车体的横向加速度,d指车辆质心到地面的距离
[0036]
根据上述完整动力学模型,确定算法所需状态方程及测量方程如下:
[0037]
状态方程表示为:
[0038][0039]
测量方程表示为:
[0040]
y(t)=h(x(t))=[a
x
,ay]+v(t)
[0041]
根据状态方程及测量方程,采用unscented kalman滤波算法,对车辆的速度状态进行估计,具体如下:
[0042]
状态量向sigma点集投影步骤如下:
[0043][0044]
其中,k指代k时刻,χ
x
(k-1)指代(k-1)时刻的状态量sigma采样点集,指代(k-1)时刻的状态量估计值,l
x
表示状态量的维度,p(k-1)表示(k-1)时刻的状态协方差。
[0045]
sigma点加权所需权值为:
[0046][0047][0048][0049]
其中w
(m)
、w
(c)
为后续加权所需权值,n表示状态向量维度,α表示一个[10-4
,1]范围内的实数,λ计算如下
[0050]
λ=α2(l
x
+3-l
x
)-l
x
[0051]
时间更新公式为:
[0052][0053][0054][0055]
其中,k指k时刻,指代状态量sigma采样点集,u指代输入量,指sigma点集的先验预测,指状态量的先验预测,w
(c)
指代sigma点集加权所用的权值,脚标i指矩阵第i列,p
xx
指先验估计协方差矩阵。
[0056]
观测更新公式为:
[0057][0058][0059][0060][0061]
其中q为过程噪声协方差矩阵;r为测量噪声协方差矩阵,指观测值sigma点集的先验预测,h[]指观测方程,为观测值的先验预测,p
yy
指观测值的协方差矩阵,p
xy
指状态量和观测量的协方差矩阵。
[0062]
卡尔曼增益计算及更新公式为:
[0063]
k(k)=p
xy
(k|k-1)p
yy
(k|k-1)-1
[0064][0065]
p(k|k)=p(k|k-1)-k(k)p
yy
(k|k-1)k(k)
t
[0066]
其中,k为卡尔曼增益,为k时刻后验状态估计量,p(k|k)为后验状态协方差矩阵。
[0067]
利用ukf算法估算的车辆速度信息及测量所得的轮速信息,估算铰接轮式车辆的四轮的侧偏角和滑移率。
[0068]
纵向滑移率公式表示为:
[0069][0070]
侧偏角公式表示为:
[0071][0072]
式中re表示车轮半径,ω
ij
表示车轮转速,v
xij
表示各轮心纵向速度,v
yij
表示各轮心纵向速度,其中i(f/r)表示前后,j(l/r)表示左右。v
xij
、v
yij
则由下式确定。
[0073]vxij
公式表示如下:
[0074][0075][0076][0077][0078]vyij
公式表示如下:
[0079][0080][0081]vyrl
=v
y-r(l
ra-l
rb
)
[0082]vyrr
=v
y-r(l
ra-l
rb
)
[0083]
式中l
fl
表示前左轮轮心到铰接点的距离,tf表示前轮轮距,l
fr
表示前右轮轮心到铰接点的距离,l
ra
表示车轮后轴到铰接点的距离,l
rb
表示后车体质心到铰接点的距离。
[0084]
由上述对本发明的描述可知,与现有技术相比,本发明具有如下有益效果:
[0085]
(1)本发明提出的一种针对铰接轮式车辆纵向滑移率的估计方法,针对铰接轮式车辆的动力学特征,提出了一种简便可用的二自由度动力学模型,并提供了一种获取车辆速度状态的有效方法,为纵向滑移率的估计提供了基础的模型依据。
[0086]
(2)本发明提供的方法中,结合对前后车体加速度信息,引入unscented kalman算法进行估计,有效克服了铰接车辆动力学模型高度的非线性所引起的结果失真。
[0087]
(3)本发明提出的方法中,针对铰接轮式车辆的任意转角工况,通过整车力矩平衡关系及轮胎路面作用关系依次计算垂向载荷和轮胎力,并导入二自由度动力学模型,计算车辆速度信息。并最终实现任意转角工况下下针对四轮纵向滑移率的估计,克服了现有铰接轮式车辆在状态获取上存在的不足,可以更加精确地估计车辆状态。
附图说明
[0088]
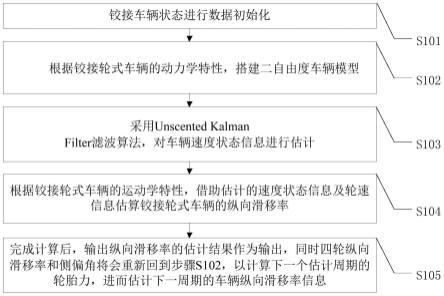
图1是本发明实施例提供的方法流程图。
[0089]
图2是本发明实施例提供的的二自由度车辆模型示意图一。
[0090]
图3是本发明实施例提供的的unscented kalman滤波算法求解示意图。
[0091]
以下结合附图和具体实施例对本发明作进一步详述。
具体实施方式
[0092]
以下通过具体实施方式对本发明作进一步的描述。
[0093]
如图1,本发明提出了一种针对铰接车辆的纵向滑移率估计方法流程图,具体为:
[0094]
s101:铰接车辆状态进行数据初始化;
[0095]
为了防止运算中出现非正定矩阵,在开始估计时,有必要对一些估计器参数作初始化设置,使整个估计过程可以正常运行,因此预先进行参数初始化,如图3所示,具体如下:
[0096]
x0=[x,y]'=[n,n]
[0097][0098]
其中p0指代初始的状态协方差,e[]代表期望值计算,x0指代初始时刻的状态向量矩阵真值,指代为初始时刻的状态向量矩阵x0的估计值。x指代车辆总质心纵向速度,y指代车辆总质心横向速度,n指代一个极小但不等于0的常数。
[0099]
s102:根据铰接轮式车辆的动力学特性,搭建二自由度车辆模型;
[0100]
在此基础上,为了准确描述铰接轮式车辆地整车动力学性能,建立铰接轮式车辆的二自由度动力学模型,如图2所示,具体如下:
[0101][0102][0103]
其中v
x
表示整车质心纵向速度,vy表示整车质心横向速度,表示整车质心纵向加速度,表示整车质心横向加速度。f
xii
与f
yii
代指纵向和横向轮胎力,ii代表对应车轮的前后(f/r)与左右(l/r)。tf及tr分别代指车辆前后轮的轮距,γ表示偏航率,δ为铰接转角。l
fb
、l
rb
分别指前车体质心、后车体质心到铰接轴距离,m为整车质量,m
fb
、m
rb
为分别表示前车体质量与后车体质量。
[0104]
动力学模型中,车辆与地面的交互作用由轮胎力体现。四轮的轮胎按照dugoff轮胎模型计算,四轮的纵向轮胎力f
xii
与横向轮胎力f
yii
具体表示为:
[0105][0106][0107][0108][0109]
其中σ表示纵向滑移率,α表示侧偏角,λ
t
为一运算过程参数,c
σ
、c
α
分别表示轮胎纵
向和横向刚度,μ表示地面摩擦系数,η为一运算过程参数,fz表示轮胎的垂向载荷。
[0110]
模型种中所述垂向载荷f
zii
具体表示如下:
[0111][0112][0113][0114][0115]
其中l
fr
、l
fl
、lr分别代指车辆前右轮、前左轮、及后轮到车辆质心的纵向距离w
fr
、w
fl
则代指车辆两前轮到车辆铰点的横向距离,g表示重力加速度,
ff
表示空气阻力,f
zd
表示铰点垂向载荷,tr表示后轮轮距,mf和mr分别表示前后车体质量,a
yf
和a
yr
分别表示前后车体的横向加速度,d指车辆质心到地面的距离
[0116]
根据上述完整动力学模型,确定算法所需状态方程及测量方程如下:
[0117]
状态方程表示为:
[0118][0119]
测量方程表示为:
[0120]
y(t)=h(x(t))=[a
x
,ay]+v(t)
[0121]
其中,a
x
表示整车总质心的纵向加速度,ay表示整车总质心的横向加速度。铰接车具有变结构特征,因此需要分别测量前后车体的加速度信息并进行相应换算。
[0122][0123][0124]
其中a
xf
和a
xr
分别表示前车体质心和后车体质心的纵向加速度,a
yf
和a
yr
分别表示前车体质心和后车体质心的纵向加速度。
[0125]
s103:采用unscented kalman filter滤波算法,对车辆速度状态信息进行估计;
[0126]
在此基础上,采用unscented kalman滤波算法,对铰接轮式车辆的速度状态进行估计,如图3所示,具体如下:
[0127]
状态量向sigma点集投影步骤如下:
[0128]
[0129]
其中,k指代k时刻,χ
x
(k-1)指代(k-1)时刻的状态量sigma采样点集,指代(k-1)时刻的状态量估计值,l
x
大小等于状态量的维度,p(k-1)表示(k-1)时刻的状态协方差。
[0130]
sigma点加权所需权值为:
[0131][0132][0133][0134]
其中w
(m)
、w
(c)
为后续加权所需权值,n表示状态向量维度,α表示一个[10-4
,1]范围内的实数,λ计算如下
[0135]
λ=α2(l
x
+3-l
x
)-l
x
[0136]
时间更新公式为:
[0137][0138][0139][0140]
其中,k指k时刻,指代状态量sigma采样点集,u指代输入量,指sigma点集的先验预测,指状态量的先验预测,w
(c)
指代sigma点集加权所用的权值,脚标i指矩阵第i列,p
xx
指先验估计协方差矩阵。
[0141]
观测更新公式为:
[0142][0143][0144][0145][0146]
其中q为过程噪声协方差矩阵;r为测量噪声协方差矩阵,指观测值sigma点集的先验预测,h[]指观测方程,为观测值的先验预测,l
x
为一个计算用参数,在本发明背景下大小等于状态变量维数,p
yy
(k|k-1)指观测值的协方差矩阵,p
xy
(k|k-1)指状态量和观测量的协方差矩阵。
[0147]
卡尔曼增益计算及更新公式为:
[0148]
k(k)=p
xy
(k|k-1)p
yy
(k|k-1)-1
[0149][0150]
p(k|k)=p(k|k-1)-k(k)p
yy
(k|k-1)k(k)
t
[0151]
其中,k为卡尔曼增益,为k时刻后验状态估计量,p(k|k)为后验状态协方差
矩阵。
[0152]
s104:根据铰接轮式车辆的运动学特性,借助估计的速度状态信息及轮速信息估算铰接轮式车辆的纵向滑移率;
[0153]
通过上述过程即可得到整车质心的速度信息。在此基础上,通过引入四轮轮速信息计算车轮的纵向滑移率以及侧偏角,作为最终的结果输出以及下一时刻估计的输入参数。
[0154]
纵向滑移率公式表示为:
[0155][0156]
侧偏角公式表示为:
[0157][0158]
式中re表示车轮半径,ω
ij
表示车轮转速,v
xij
表示各轮心纵向速度,v
yij
表示各轮心纵向速度,其中i(f/r)表示前后,j(l/r)表示左右。v
xij
、v
yij
则由下式确定。为了计算方便,对后车体质心的纵向速度和横向速度进行相应换算,如图2所示,表示如下:
[0159][0160][0161]
其中v
xr
为后车体质心纵向速度,中v
yr
为后车体质心横向速度,δ为铰接转角。
[0162]
通过引入包括后车体偏航率、铰接转向角速度、整车质心速度信息等的车辆运动学参数以及车辆几何参数以及测量所得的四轮轮速信息,按照运动学关系分别计算四轮轮心的纵向速度和横向速度,如图2所示,具体由下式确定:
[0163]
纵向轮速v
xij
公式表示如下:
[0164][0165][0166][0167][0168]
横向轮速v
yij
公式表示如下:
[0169][0170]
[0171]vyrl
=v
y-r(l
ra-l
rb
)
[0172]vyrr
=v
y-r(l
ra-l
rb
)
[0173]
式中l
ra
表示车轮后轴到铰接点的距离,l
rb
表示后车体质心到铰接点的距离,tf表示前轮轮距,l
fta
、l
rta
表示前后轮轴到铰接轴的距离。
[0174]
s105:完成计算后,输出纵向滑移率的估计结果作为输出,同时四轮纵向滑移率和侧偏角将会重新回到步骤s102,以计算下一个估计周期的轮胎力,进而估计下一周期的车辆纵向滑移率信息。
[0175]
本发明提出的一种针对铰接轮式车辆纵向滑移率的估计方法,针对铰接轮式车辆的动力学特征,提出了一种简便可用的二自由度动力学模型,并提供了一种获取车辆速度状态的有效方法,为纵向滑移率的估计提供了基础的模型依据。
[0176]
本发明提供的方法中,结合对前后车体加速度信息,引入unscented kalman算法进行估计,有效克服了铰接车辆动力学模型高度的非线性所引起的结果失真。
[0177]
本发明提出的方法中,针对铰接轮式车辆的任意转角工况,通过整车力矩平衡关系及轮胎路面作用关系依次计算垂向载荷和轮胎力,并导入二自由度动力学模型,计算车辆速度信息。并最终实现任意转角工况下下针对四轮纵向滑移率的估计,克服了现有铰接轮式车辆在状态获取上存在的不足,可以更加精确地估计车辆状态。
[0178]
上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1