一种汽车主动悬架结构及其控制方法与流程
1.本发明涉及汽车底盘技术领域,特别涉及一种汽车主动悬架结构及其控制方法。
背景技术:
2.现在汽车配备的悬架种类很多,按结构分大致可以分为麦弗逊式独立悬架、横臂式独立悬架、纵臂式独立悬架、双叉臂式独立悬架、多连杆式独立悬架。其中应用最广的是麦弗逊式独立悬架,麦弗逊式悬挂由螺旋弹簧、减震器、三角形下摆臂组成,绝大部分车型还会加上横向稳定杆。此悬架的优点是成本低,制造简单,占用空间小,重量轻;缺点是稳定性差,抗侧倾和制动点头能力弱,增加稳定杆以后有所缓解但无法从根本上解决问题,耐用性不高,减震器容易漏油需要定期更换。
技术实现要素:
3.针对以上问题,本发明的目的是提供一种汽车主动悬架结构及其控制方法。
4.为解决上述问题,本发明提供以下的技术方案:
5.一种汽车主动悬架结构,包括车轮,所述车轮上设有横向稳定杆与车轴组成的麦弗逊式主动悬架,所述麦弗逊式主动悬架上方设有电磁减振器。
6.本发明还提供一种汽车主动悬架结构的控制方法,具体为:
7.驻车状态:在整车电路接通时,车辆vcu会自检车主是否开启了主动悬架,如果确认开启状态vcu会给主动悬架控制模块一个信号,控制模块会将汽车高度调整为正常状态,悬架硬度调整为适中;若是没有确定开启状态,车速传感器将车速信息反馈给vcu,vcu判断是否为驻车状态,此时车载陀螺仪判断汽车所处位置是否为坡道或是不平路面上,若是处于平整且没有坡道的道路上,vcu发送指令给主动悬架控制模块,控制模块会调节悬架状态,降低悬架高度,放低整车姿态;若是陀螺仪判断汽车处于坡道或是不平路面上,由vcu根据陀螺仪反馈的整车状态调节悬架的状态,使整车状态处于水平状态;
8.行车状态:由车速传感器传来的信号反馈给vcu,若是vcu判断车辆为行驶状态,汽车高度传感器、车载雷达与陀螺仪反馈车辆转弯、路面信息给vcu,vcu发送信号给主动悬架控制器控制相应的悬架进行调节;
9.当车速传感器判断车速下降到0时反馈停车信号给vcu,vcu判断车辆停止是否挂上驻车挡并拉起手刹,若是没有,将继续保持原状态;若检测出挂上驻车档且手刹已经拉上,车门上的传感器会检测车门是否被打开,若是没有打开,vcu给主动悬架控制器发送指令,控制器控制降低悬架高度,放低整车姿态,做好乘客下车准备;若是检测出车门打开信号,vcu发送指令给主动悬架控制器,根据打开车门选择整车侧跪方向,若两侧同时开启则降低整车悬置高度致车主预设下车高度;
10.当车辆熄火后但检测车钥匙在车内时采用“半小时工作模式”整车电源不断开,整车处于低姿态状态,做好乘客下车准备。
11.本发明的进一步技术:
12.优选的,行车状态悬架进行调节具体方式为:
13.路面相对平整:
14.但此时车速传感器反馈车速大于或等于110km/h时,vcu发送信号给控制模块控制主动悬架将悬架硬度调整为“硬悬架”状态降低整车高度,前桥比后桥姿态更低;
15.若是判断此时车辆车速大于等于30km/h而小于80km/h时,vcu发送指令给悬架控制器使悬架硬度和车辆高度调整为“适中”状态,汽车高度传感器、车载雷达与陀螺仪反馈车辆转弯、路面信息给vcu,vcu发送信号给主动悬架控制器控制相应的悬架进行调节;
16.若是判断此时车辆车速小于30km/h时,vcu发送指令给悬架控制器使悬架硬度和车辆高度调整为“软悬架”状态,汽车高度传感器、车载雷达与陀螺仪反馈车辆转弯、路面信息给vcu,vcu发送信号给主动悬架控制器控制相应的悬架进行调节;
17.路面不平状态:
18.若是处于路面不平状态,由陀螺仪和高度传感器反馈给vcu的路面信号,vcu发送信号给主动悬架控制器,控制器将悬架硬度调整为“软悬架”状态,用来满足汽车在不平路面上行驶时车轮有较大的运动空间。
19.以上技术方案的有益效果是:
20.本发明在原先麦弗逊式主动悬架的基础上进行改良,在上面加入电磁减震结构,这样既缓解了原先减震器容易漏油和抗侧倾和制动点头能力弱的缺陷,还可以将汽车悬架进行主动控制调节,使汽车适应多种工况。
附图说明
21.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图;
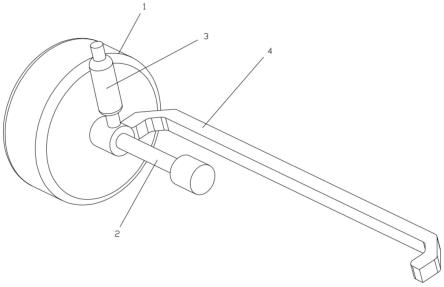
22.图1为本发明的一种汽车主动悬架结构示意图;
23.图2为本发明的一种汽车主动悬架结构的控制方法流程图。
具体实施方式
24.下面结合附图详细说明本发明的实施方式。
25.如图1,一种汽车主动悬架结构,包括车轮1,所述车轮1上设有横向稳定杆4与车轴2组成的麦弗逊式主动悬架,所述麦弗逊式主动悬架上方设有电磁减振器3。
26.如图2,本发明还提供一种汽车主动悬架结构的控制方法,工作原理或工作过程:
27.1、驻车状态:在整车电路接通时,车辆vcu会自检车主是否开启了主动悬架,如果确认开启状态vcu会给主动悬架控制模块一个信号,控制模块会将汽车高度调整为正常状态,悬架硬度调整为适中;若是没有确定开启状态,车速传感器将车速信息反馈给vcu,vcu判断是否为驻车状态,此时车载陀螺仪判断汽车所处位置是否为坡道或是不平路面上,若是处于平整且没有坡道的道路上,vcu发送指令给主动悬架控制模块,控制模块会调节悬架状态,降低悬架高度,放低整车姿态;若是陀螺仪判断汽车处于坡道或是不平路面上,由vcu根据陀螺仪反馈的整车状态调节悬架的状态,使整车状态处于水平状态。
28.2、行车状态:由车速传感器传来的信号反馈给vcu,若是vcu判断车辆为行驶状态,汽车高度传感器、车载雷达与陀螺仪反馈车辆转弯、路面信息给vcu,vcu发送信号给主动悬架控制器控制相应的悬架进行调节。
29.(1)路面相对平整:
30.但此时车速传感器反馈车速大于或等于110km/h时,vcu发送信号给控制模块控制主动悬架将悬架硬度调整为“硬悬架”状态降低整车高度,降低重心,增加整车稳定性,前桥应比后桥姿态更低。减小迎风最大截面和降低对侧风对整车的影响,同时降低整车油耗。
31.若是判断此时车辆车速大于等于30km/h而小于80km/h时,vcu发送指令给悬架控制器使悬架硬度和车辆高度调整为“适中”状态,汽车高度传感器、车载雷达与陀螺仪反馈车辆转弯、路面信息给vcu,vcu发送信号给主动悬架控制器控制相应的悬架进行调节。
32.若是判断此时车辆车速小于30km/h时,vcu发送指令给悬架控制器使悬架硬度和车辆高度调整为“软悬架”状态,增加驾驶人的舒适度,汽车高度传感器、车载雷达与陀螺仪反馈车辆转弯、路面信息给vcu,vcu发送信号给主动悬架控制器控制相应的悬架进行调节。
33.(2)路面不平状态:
34.若是处于路面不平状态,此时车速一定不会很快,由陀螺仪和高度传感器反馈给vcu的路面信号,vcu发送信号给主动悬架控制器,控制器将悬架硬度调整为“软悬架”状态,用来满足汽车在不平路面上行驶时车轮有较大的运动空间。
35.3、当车速传感器判断车速下降到0时反馈停车信号给vcu,vcu判断车辆停止是否挂上驻车挡并拉起手刹,若是没有,将继续保持原状态;若检测出挂上驻车档且手刹已经拉上,车门上的传感器会检测车门是否被打开,若是没有打开,vcu给主动悬架控制器发送指令,控制器控制降低悬架高度,放低整车姿态,做好乘客下车准备;若是检测出车门打开信号,vcu发送指令给主动悬架控制器,根据打开车门选择整车侧跪方向,若两侧同时开启则降低整车悬置高度致车主预设下车高度。
36.4、当车辆熄火后但检测车钥匙在车内时采用“半小时工作模式”整车电源不断开,整车处于低姿态状态,做好乘客下车准备。工作原理或工作过程
37.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1