用于车辆传动系统的阻尼控制方法、机构和车辆动力总成与流程
本发明涉及车辆,更具体而言,本发明涉及一种用于车辆传动系统的阻尼控制方法,一种利用该方法来对车辆传动系统进行阻尼控制的机构,以及包括该机构的车辆动力总成。
背景技术:
1、在电动车辆、混合动力车辆等新能源车辆中,车辆传动系统是为车辆提供动力的核心组成部分。通常,利用悬挂系统来对车辆传动系统进行阻尼控制,以减少车辆震动,改善乘行人员的乘车体验。
2、现有的阻尼控制技术通常需要通过手动或者自适应的fft(快速傅里叶变换)从车辆波动的转速中滤出波动信号,再通过滤波器对该信号进行相位和幅值的调节,最后将调节后的信号作为补偿值补偿到负载的给定扭矩。该技术涉及到大量的数据存储(以便采用fft分析出共振频率)和大量的人工标定过程(例如,对fft分析出的幅值和频率进行补偿扭矩的标定)。特别是,在车辆的实际测试过程中,需要根据车辆的不同工况、行驶环境等单独进行标定,标定工作量大,非常耗费人力。
3、其他阻尼控制技术采用神经网络学习的方式来进行扭矩补偿,然而自学习的过程花费的时间通常较长,造成了时间成本的增加。
4、即使利用上述技术进行了主动阻尼控制,如果车辆部件(例如,减速器)出现磨损,则也有可能导致车辆防抖功能的失效。
技术实现思路
1、有鉴于此,根据本发明的第一方面,提供了一种用于车辆传动系统的阻尼控制方法,其中,该方法包括如下步骤:
2、第一步骤,获取车辆传动系统的运行参数;
3、第二步骤,将在第一步骤中获取的运行参数输入到参数辨识模型中,以确定相应的悬挂系统参数;
4、第三步骤,将在第二步骤中确定的悬挂系统参数输入到滑模观测器中,以获取负载扭矩观测值和轴扭观测值;以及
5、第四步骤,基于在第三步骤中获取的负载扭矩观测值和轴扭观测值对车辆传动系统进行阻尼控制,以消除电机或车轮的转速波动。
6、其中,所述运行参数包括电机扭矩、电机减速器转动惯量以及电机或车轮的实际转速中的至少一者。
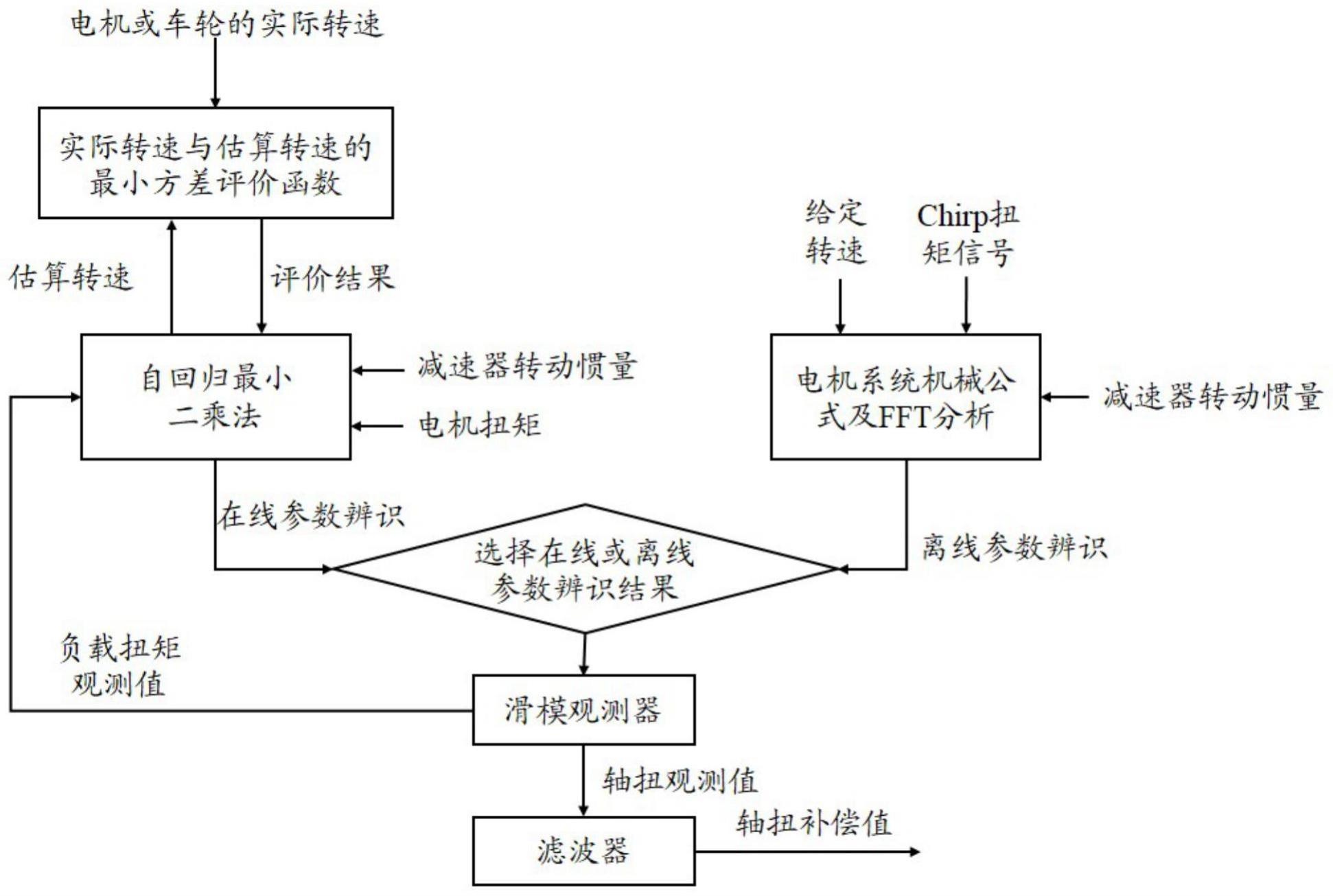
7、其中,在所述参数辨识模型中存储有电机或车轮的估算转速与实际转速之间的最小方差评价函数,并且所述参数辨识模型基于该最小方差评价函数的评价结果来启动或停止参数辨识过程。
8、其中,该方法还包括:
9、将在第三步骤中获取的负载扭矩观测值反馈至所述参数辨识模型中,并且该参数辨识模型基于所接收的负载扭矩观测值、电机扭矩以及电机减速器转动惯量来确定电机或车轮的估算转速。
10、其中,所述参数辨识模型采用自回归最小二乘法来确定电机或车轮的估算转速。
11、其中,该方法还包括介于第三步骤与第四步骤之间的第五步骤,在该第五步骤中利用高通滤波器滤除轴扭观测值中的直流分量并对滤波后的轴扭观测值进行相位调整,以获得用于补偿半轴波动扭矩的轴扭补偿值。
12、其中,所述悬挂系统参数包括弹性系数和负载惯量。
13、其中,所述参数辨识模型还配置为以离线方式获取所述悬挂系统参数,在该离线方式下,借助抬升机将车辆架起并采取转速闭环控制和电机机械模型来获取所述负载惯量;以及采用线性调频扭矩信号、利用快速傅里叶变换来获取所述弹性系数。
14、根据本发明的第二方面,提供了一种利用如上所述的方法来对车辆传动系统进行阻尼控制的机构,其中,该机构包括:
15、检测装置,该检测装置配置为获取车辆传动系统的运行参数;
16、参数辨识模块,该参数辨识模块配置为基于由所述检测装置检测的运行参数来确定相应的悬挂系统参数;
17、滑模观测器,该滑模观测器配置为基于由所述参数辨识模块确定的悬挂系统来获取负载扭矩观测值和轴扭观测值;以及
18、控制模块,该控制模块配置为基于由所述滑模观测器获取的扭矩观测值和轴扭观测值来对车辆传动系统进行阻尼控制,以消除电机或车轮的转速波动。
19、根据本发明的第三方面,提供了一种包括如上所述的机构的车辆动力总成。
20、根据本发明的用于车辆传动系统的阻尼控制方法至少能够实现如下优点之一:
21、-采用自适应的滑模观测器和参数辨识模型,减少了人为标定的过程,确保了阻尼控制的鲁棒性;
22、-参数辨识模型可选择在线或离线的方式来获得观测器所需要的参数,可适应的应用场景更多;
23、-在线观测的方式可通过最小方差评价函数来进行在线参数辨识,确保了系统的稳定性;以及
24、-即使在由于车辆传动系统出现磨损而导致震动频率偏移的情况下也能够及时修正主动阻尼效果,避免了震动抑制的失效。
技术特征:
1.一种用于车辆传动系统的阻尼控制方法,其中,该方法包括如下步骤:
2.根据权利要求1所述的方法,其中,所述运行参数包括电机扭矩、电机减速器转动惯量以及电机或车轮的实际转速中的至少一者。
3.根据权利要求2所述的方法,其中,在所述参数辨识模型中存储有电机或车轮的估算转速与实际转速之间的最小方差评价函数,并且所述参数辨识模型基于该最小方差评价函数的评价结果来启动或停止参数辨识过程。
4.根据权利要求3所述的方法,其中,该方法还包括:
5.根据权利要求4所述的方法,其中,所述参数辨识模型采用自回归最小二乘法来确定电机或车轮的估算转速。
6.根据权利要求1至5中任一项所述的方法,其中,该方法还包括介于第三步骤与第四步骤之间的第五步骤,在该第五步骤中利用高通滤波器滤除轴扭观测值中的直流分量并对滤波后的轴扭观测值进行相位调整,以获得用于补偿半轴波动扭矩的轴扭补偿值。
7.根据权利要求1至5中任一项所述的方法,其中,所述悬挂系统参数包括弹性系数和负载惯量。
8.根据权利要求7所述的方法,其中,所述参数辨识模型还配置为以离线方式获取所述悬挂系统参数,在该离线方式下,借助抬升机将车辆架起并采取转速闭环控制和电机机械模型来获取所述负载惯量;以及采用线性调频扭矩信号、利用快速傅里叶变换来获取所述弹性系数。
9.一种利用根据权利要求1至8中任一项所述的方法来对车辆传动系统进行阻尼控制的机构,其中,该机构包括:
10.一种包括根据权利要求9所述的机构的车辆动力总成。
技术总结
本发明公开了一种用于车辆传动系统的阻尼控制方法,其中,该方法包括如下步骤:第一步骤,获取车辆传动系统的运行参数;第二步骤,将在第一步骤中获取的运行参数输入到参数辨识模型中,以确定相应的悬挂系统参数;第三步骤,将在第二步骤中确定的悬挂系统参数输入到滑模观测器中,以获取负载扭矩观测值和轴扭观测值;以及第四步骤,基于在第三步骤中获取的负载扭矩观测值和轴扭观测值对车辆传动系统进行阻尼控制,以消除电机或车轮的转速波动。本发明还公开了一种利用该方法来对车辆传动系统进行阻尼控制的机构,以及包括该机构的车辆动力总成。
技术研发人员:刘洋
受保护的技术使用者:纬湃汽车电子(天津)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!