电动化车辆绞盘和绞盘操作方法与流程
1.本公开总体上涉及一种与车辆结合使用的绞盘,并且更具体地涉及一种通过充电端口连接器供电的绞盘。
背景技术:
2.一些车辆可以装备有绞盘。绞盘可以用于将车辆从泥、雪、沙等中拉出。一些车辆通过动力输出装置为绞盘提供动力。一些车辆从车辆电池为绞盘供电。
技术实现要素:
3.根据本公开的示例性方面的电动化车辆绞盘总成尤其包括绞盘和连接到电动化车辆的充电端口的充电端口连接器。绞盘通过充电端口连接器供电。
4.在前述总成的另一个示例中,绞盘由牵引电池通过充电端口连接器供电。
5.前述总成中的任一者的另一个示例包括牵引电池组,所述牵引电池组通过充电端口连接器为绞盘供电。
6.前述总成中的任一者的另一个示例包括在电动化车辆外部的外部电源。外部电源通过电动化车辆向绞盘提供电力。
7.在前述总成中的任一者的另一个示例中,外部电源是电网电源。
8.在前述总成中的任一者的另一个示例中,外部电源是另一电动化车辆。
9.前述总成中的任一者的另一个示例包括车辆的至少一个灯。至少一个灯被配置为响应于绞盘的操作而进行调整。
10.在前述总成中的任一者的另一个示例中,至少一个灯的强度响应于绞盘上的负载的变化而变化。
11.在前述总成中的任一者的另一个示例中,绞盘被配置为安装到电动化车辆。
12.前述总成中的任一者的另一个示例包括电线,所述电线将绞盘电连接到充电端口连接器。当绞盘通过充电端口连接器供电时,电线在电动化车辆的外部。
13.根据本公开的又一个示例性方面的绞盘操作方法尤其包括操作绞盘以移动负载,并且在操作期间通过电动化车辆的充电端口为绞盘供电。
14.前述方法的另一个示例包括在供电期间从电动化车辆的牵引电池组向绞盘提供电力。
15.前述绞盘操作方法的另一个示例包括在供电期间从电动化车辆外部的电源向电动化车辆提供电力。
16.在前述绞盘操作方法中的任一者的另一个示例中,电动化车辆外部的电源是另一电动化车辆。
17.前述绞盘操作方法中的任一者的另一个示例包括响应于操作而改变电动化车辆的至少一个灯的照明模式。
18.在前述绞盘操作方法中的任一者的另一个示例中,改变照明模式包括响应于到绞
盘的电力流而改变来自至少一个灯的光的强度。
19.在前述绞盘操作方法中的任一者的另一个示例中,绞盘在操作和供电期间固定到电动化车辆。
20.前述绞盘操作方法中的任一者的另一个示例包括使用电线和充电端口连接器将绞盘电连接到充电端口。
21.在前述绞盘操作方法中的任一者的另一个示例中,电线和充电端口连接器在操作和供电期间在电动化车辆外部。
22.在前述绞盘操作方法中的任一者的另一个示例中,绞盘上的负载用于为电动化车辆的牵引电池再充电。
23.可以独立地或以任何组合方式采用前述段落、权利要求或以下描述和附图的实施例、示例和替代方案,包括它们的各种方面或相应各个特征中的任何一个。结合一个实施例描述的特征适用于所有实施例,除非此类特征是不兼容的。
附图说明
24.根据具体实施方式,所公开示例的各种特征和优点对于本领域技术人员而言将变得显而易见。随附于具体实施方式的附图可以简要地描述如下:
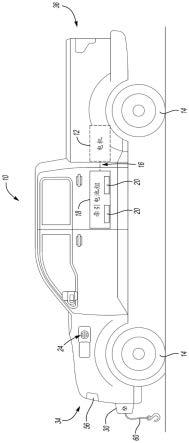
25.图1示出了安装到电动化车辆的绞盘的侧视图。
26.图2示出了当绞盘未安装到车辆时图1的车辆的透视图。
27.图3示出了当绞盘安装到车辆时图1的透视图。
28.图4示出了当绞盘正在操作并且未安装到车辆时,操作者远程观察绞盘的操作。
29.图5示出了与控制图1至图4的绞盘相关联的示例性方法的流程。
具体实施方式
30.本公开详细描述了一种具有绞盘和充电端口连接器的绞盘总成。绞盘可以由电动化车辆通过电动化车辆的充电端口供电。这种方法为绞盘提供了足够的动力,而无需对车辆进行大量修改。
31.参考图1,电动化车辆10包括电动化动力传动系统。在示例性实施例中,电动化车辆10是电池电动车辆(bev)。然而,本文描述的概念不限于bev并且可以扩展到其他电动化车辆,包括但不限于插电式混合动力电动车辆(phev)、燃料电池车辆等。因此,尽管在该实施例中未具体示出,但是电动化车辆10可以配备有内燃发动机,所述内燃发动机可以单独采用或者与其他能量源组合采用来推进电动化车辆10。
32.在图1所示的实施例中,车辆10是在没有来自内燃发动机的任何辅助的情况下通过至少一个电机12推进的纯电动车辆。电机12可以充当电动马达、发电机或其两者。电机12在通电时通过例如变速器或变速箱(未示出)向一个或多个驱动轮14提供旋转输出扭矩。
33.电压总线16将电机12电连接到电池组18。牵引电池组18可以是高压牵引电池组,所述高压牵引电池组包括一个或多个电池阵列20(即,能够输出电力以操作电机和/或电动化车辆10的电气负载的电池总成或可再充电电池单元的群组)。牵引电池组18可以通过将充电线连接到电动化车辆10的充电端口24来再充电。
34.现在参考图2和图3并且继续参考图1,绞盘30可以连接到车辆10。在此示例中,绞
盘30连接到车辆10的前端34。在另一个示例中,绞盘30可以连接到车辆10的另一个区域,诸如车辆10的后端36。
35.绞盘30是动力绞盘。绞盘30可以包括用于驱动绞盘30的dc马达。
36.在绞盘30的操作期间,电线38和充电端口连接器40用于将绞盘30电联接到电动化车辆10。具体地,充电端口连接器40直接联接到电动化车辆10的充电端口24。因为电力通过充电端口连接器40传递到绞盘30,所以绞盘30通过充电端口连接器40供电。因为电力通过充电端口24传递到绞盘30,所以绞盘30通过充电端口24供电。
37.通过充电端口连接器40和充电端口24为绞盘30供电使得绞盘30能够相对简单地从图2中所示的未安装位置转变到图3中所示的操作位置。具有电线38和充电端口连接器40的绞盘30可以作为售后物品提供给用户并且相对简单地结合到用户的现有车辆10中。如果绞盘30替代地完全通过电动化车辆10供电,则可能需要在车辆10内进行修改以便在操作期间为绞盘30供电。
38.供应给充电端口连接器40并且最终供应给绞盘30的电力来自牵引电池组18。也就是说,绞盘30由牵引电池组18通过充电端口连接器40供电。
39.在一些示例中,在电动化车辆10外部的电源52可以在牵引电池组18向绞盘30提供电力时提供电力。例如,电源52可以是电网电源。在另一个示例中,电源52可以是另一电动化车辆。在牵引电池组18为绞盘30供电时从外部电源52向车辆10提供电力可以防止牵引电池组18的荷电状态下降到不足以继续为绞盘30供电的水平。车辆10可以包括第二充电端口54,所述第二充电端口允许车辆10电联接到外部电源52,同时充电端口24电联接到充电端口连接器40。
40.车辆10包括各种灯,包括在车辆10的前端34处的前灯56。当绞盘30延伸并且缩回电线60时,可以控制车辆10的前灯56以响应于绞盘30的操作而进行调整。例如,当提供给绞盘30的电力由于例如绞盘30上的负载增加而增加时,前灯56的强度和/或亮度可以增加。车辆10的灯可以提供接近或超过绞盘额定负载的视觉指示。灯可以用作车辆10内在用户的智能手机上显示的警报的冗余通知器。
41.在图3中,绞盘30被示出为处于操作位置,其中绞盘30通过充电端口连接器40和充电端口44供电,同时绞盘30连接到车辆10。在其他示例中,绞盘30可以在通过充电端口连接器40和充电端口44供电时与车辆10断开连接。然而,通过使充电端口连接器40保持联接到充电端口44,绞盘30可以保持通过充电端口44供电。然后,绞盘30可以用于绞盘30与电动化车辆10间隔开的区域。
42.还可以设想,绞盘30可以被设计成是可恢复的,使得当绞盘30降低负载时,负载功率被转换成对牵引电池组18充电的功率。这可以延长牵引电池组18的使用时间。
43.图4示出了在与车辆(未示出)间隔开的位置处利用的另一个示例性绞盘30a的数字图像。绞盘30a由车辆通过充电端口供电,同时用于升高和降低负载64。
44.用户68可以利用监测装置(诸如智能手机72)来监测负载64利用绞盘30a的移动。在一些示例中,绞盘30a可以包括相机以拍摄绞盘30a周围的区域的图像。这些图像可以被发送到智能手机72以帮助用户监测负载64。
45.在一些示例中,用户68可能够从远离绞盘30a的位置控制绞盘30a的操作。用户68可以通过智能手机72或另一个装置控制绞盘30a的操作。
46.从远离绞盘30a的位置控制和监测绞盘30a使得用户68尤其能够在绞盘30a的操作期间与负载64和绞盘30a保持一定距离。
47.在图1至图3的绞盘30或绞盘30a的操作期间,可以依赖于电动化车辆10以及车载传感器(例如,声音激励器/传声器、相机/雷达传感器等)的预测(例如,hv电池续航里程、soc等)来警告用户68绞盘操作的问题(例如,电线电缆缠结、接地堵塞等)。
48.声音激励器74(诸如传声器)可以位于车辆10中靠近绞盘30或30a处。这些激励器将能够收听到拉入/拉出绕组并且检测任何可听差异(例如,在张力谐波下收听到来自预期绞盘电线的任何声音增量,或者收听到可能指示缠结的电线/打结等的“磨削”噪声)。另外,声音激励器将用于拾取来自用户68的可听命令。例如,绞盘30或30a可以响应于大喊停止命令而操作。
49.车辆10的相机76可以用于提供视角并且使得能够在整个绞盘控制过程中将视频馈送实时广播到例如现场管理员的智能手机。
50.在一些示例中,高级驾驶员辅助系统传感器或雷达传感器可以测量不断变化的环境状况,以及在到达目的地或产生土堆或其他障碍物时停止该过程。
51.参考图5,控制绞盘30和30a的示例性方法可以在步骤100处开始,在步骤104处,询问诸如绞盘30、30a的绞盘是否连接到车辆10。如果否,则所述方法在步骤108处提示用户连接绞盘。
52.如果在步骤104处连接了绞盘,则所述方法移动到步骤112,所述步骤确认用户是否存在。如果否,则所述方法移动回到步骤100。如果是,则所述方法从步骤112移动到步骤116,其中所述方法提示用户提供绞盘度量,诸如所需扭矩、所需移动量等。在一些示例中,用户利用图4中所示的智能装置输入这些度量。
53.然后,所述方法移动到步骤120,所述步骤确认车辆10是否处于驻车挡。如果否,则所述方法移动到步骤122,所述步骤通知用户接合车辆的驻车和电子制动器。如果在步骤120处,车辆换挡到驻车挡,则所述方法移动到步骤124,其中用户输入绞盘预设。如果未输入预设,则所述方法移动到步骤128,所述步骤提示用户输入绞盘的度量。
54.如果在步骤124处,用户已经输入绞盘预设,则所述方法移动到步骤132,所述步骤估计通过以期望的方式操作绞盘而潜在地使用的能量。在步骤132中,所述方法将估计值呈现给用户以供查看。
55.然后,所述方法移动到步骤136,所述步骤请求用户确认预设。如果用户已经确认,则所述方法移动到步骤140,其中接合车辆的电动马达以为绞盘提供拉出控制。
56.然后,所述方法移动到步骤144,其中利用各种传感器和其他装置来监测绞盘的操作。然后,所述方法移动到步骤148,所述步骤基于步骤144中的监测来评估绞盘的操作与绞盘操作时的期望特性之间的潜在差值。
57.如果监测信息指示绞盘已经基本上偏离期望的操作特性,则所述方法移动到步骤152,其中停止绞盘操作并且通知用户。可能导致绞盘停止的示例性情况可能包括电线缠结或打结、阻塞等。
58.然后,所述方法从步骤152移动到步骤154,其中提供建议以补救在步骤152中提供给用户的问题。然后,所述方法返回到步骤148。
59.如果步骤148中的监测信息指示绞盘按预期操作,则所述方法从步骤148移动到步
骤158,在所述步骤处,在仪表组或在其他示例中在智能装置上显示与绞盘的操作相关联的更新。
60.所述方法从步骤158移动到步骤162,所述步骤确定是否已经实现用户在步骤162中设定的目标。如果是,则所述方法移动到步骤166,其中通知用户已经达到绞盘目标。
61.然后,所述方法移动到步骤170,其中(例如,经由智能手机上的提示)询问用户是否应继续操作绞盘。如果是,则所述方法从步骤170移动回到步骤116,其中再次提示用户期望的绞盘度量。如果在步骤170处用户不再想要操作绞盘,则所述方法移动到步骤174,其中缩回绞盘。
62.接下来,在步骤178处,所述方法确认绞盘是否已经完全缩回。如果是,则所述方法移动到步骤182,其中通知用户绞盘缩回。然后,所述方法移动到步骤186,所述步骤记录与从车辆的牵引电池(在此示例中)为绞盘供电相关联的能量使用量。然后,所述方法移动到步骤190,所述步骤将这些测量值传输到后端数据库。可以在数据库内使用测量值来更新进一步的预设估计值。
63.例如,车辆10可能够基于计算的使用量(例如,客户输入)关于牵引电池组18的荷电状态进行估计。然后,车辆10可以向用户68报告绞盘30a的总可用时间。例如,预设为100磅,以40英尺/分钟的速度向上移动30英尺高的梯子;重复超过1小时产生6.5kw的估计能量使用量。通过扩展,车辆10可以在需要充电或需要部署第二车辆之前基于车辆预测来提供对可以支持操作的次数的估计值(例如,将汽车从沟渠中拉出与根除灌木或小树或生活材料(木材/砌体)的次数。
64.在绞盘操作之后,将估计的能量使用量与实际能量使用量进行比较,并且将在下一个预设条目中进行更新。每个“预设”条目/测量值将被传输到数据库,并且将被编目/发布以用于可以共享给其他用户的汇总配置文件。这可以进一步细化估计值。
65.然后,所述方法在步骤194处结束。
66.所公开的示例的特征包括可以由牵引电池、外部电源或两者供电的绞盘。以这种方式为绞盘供电可以避免与从12伏附件电池为绞盘供电相关联的问题。绞盘可以用由dc电源供电的dc马达来驱动。dc马达可以比ac马达更有效。绞盘允许无缝连接,同时通过车辆的hv电源组受益于更大的电池储备。
67.先前描述在本质上是示例性的而非限制性的。对所公开的示例作出的变化和修改对于本领域技术人员而言可能变得显而易见,所述变化和修改不一定脱离本公开的本质。因此,赋予本公开的法律保护范围只能通过研究所附权利要求来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1