一种景区固定路线自动驾驶游览车系统的制作方法
1.本发明属于智能驾驶技术领域,具体地说,本发明涉及一种景区固定路线自动驾驶游览车系统。
背景技术:
2.目前,智能驾驶技术仍然处于研发阶段或者示范运营阶段,距离量产和广泛应用还有很长的路要走。而较为封闭的景区固定路线,适合自动驾驶游览车的示范运营。游览车通常安装视觉摄像头、激光雷达、毫米波雷达以及自动驾驶控制系统,结合线控制动、线控转向和线控驱动实现自动驾驶。但是成本非常高,只在一些示范景区应用。结合景区封闭特性以及路线相对固定的特征,开发一种低成本的自动驾驶游览车,沿着景区固定路线自动运营,不仅可以减轻驾驶员的劳动强度,而且还可以替代驾驶员,节约人力成本。
技术实现要素:
3.本发明提供一种景区固定路线自动驾驶游览车系统,以解决上述背景技术中存在的问题。
4.为了实现上述目的,本发明采取的技术方案为:一种景区固定路线自动驾驶游览车系统,包括景区固定黑色封闭道路和自动驾驶游览车;
5.所述自动驾驶游览车包括游览车本体以及与游览车本体连接的感知系统、供电系统、自动驾驶游览车控制驱动系统、电动驱动系统、电动转向系统、电动制动系统、车门控制系统、5g通信模块和车速传感器。
6.优选的,所述感知系统包括左红外循迹传感器、右红外循迹传感器、前方超声波传感器一、前方超声波传感器二、前方超声波传感器三和侧门红外传感器,所述左红外循迹传感器、右红外循迹传感器与游览车本体的底部对称连接,所述前方超声波传感器一、前方超声波传感器二、前方超声波传感器三与游览车本体前方连接,所述侧门红外传感器与游览车本体的侧门位置连接。
7.优选的,所述供电系统包括可充电电池、太阳能充电系统和太阳能面板,所述太阳能面板与游览车本体的车顶连接,太阳能面板接收光照通过太阳能充电系统给可充电电池充电,所述可充电电池也设置外接充电接口直接充电。
8.优选的,所述自动驾驶游览车控制驱动系统包括单片机最小系统、直流供电电源模块、直流电机驱动模块、伺服电机驱动模块和蜂鸣器报警模块。
9.优选的,所述电动驱动系统包括直流电机一、直流电机二、左前驱动轮和右前驱动轮,所述直流电机驱动模块控制直流电机一驱动左前驱动轮,所述直流电机驱动模块控制直流电机二驱动右前驱动轮。
10.优选的,所述电动转向系统包括伺服电机一和转向机构,所述伺服电机驱动模块控制伺服电机一驱动转向机构控制转向。
11.优选的,所述电动制动系统包括直流电机三、直流电机四、左后制动轮和右后制动
轮,所述直流电机驱动模块控制直流电机三制动左后制动轮,所述直流电机驱动模块控制直流电机四制动右后制动轮。
12.优选的,所述车门控制系统包括直流电机五、车门驱动装置、伺服电机二和车门门锁开关,所述直流电机驱动模块控制直流电机五带动车门驱动装置驱动车门的左右移动,所述伺服电机驱动模块控制伺服电机二驱动车门门锁开关的开闭。
13.优选的,所述左红外循迹传感器和右红外循迹传感器安装在游览车本体底盘距离车头1/5底盘位置,所述左红外循迹传感器和右红外循迹传感器在游览车本体底盘宽度方向为2/3底盘宽。
14.优选的,所述景区固定黑色封闭道路采用黑色油漆粉刷,所述景区固定黑色封闭道路的宽度为游览车本体底盘宽度的1/2。
15.采用以上技术方案的有益效果是:
16.1、本发明的景区固定路线自动驾驶游览车系统,采用低成本的超声波雷达实现避障和采用低成本的红外循迹传感器实现循迹,替代昂贵的摄像头、毫米波雷达和激光雷达,既能够满足低速固定路线自动驾驶游览车的自动载客需求,又可以有效解决运营成本高的问题。
17.2、本发明的景区固定路线自动驾驶游览车系统,通过两路红外循迹传感器可以实现循迹、识别停车站点、计数运行趟数和识别起始点,在不增加成本的情况下,实现了更多的功能。
18.3、本发明的景区固定路线自动驾驶游览车系统,侧门红外传感器16可以检测是否有人上车,当没有人上车时,可以提前开车,提高车辆运行效率。
19.4、本发明的景区固定路线自动驾驶游览车系统,为了避免左红外循迹传感器11和右红外循迹传感器12受太阳强光线的影响,车辆四周底部装有遮光帘,用于遮挡强光。
附图说明
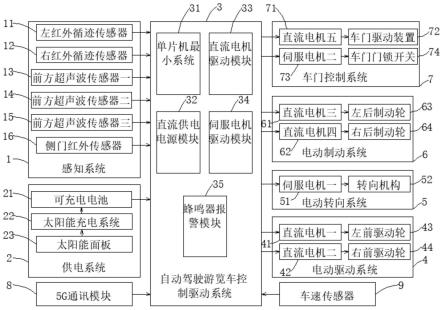
20.图1是本发明的景区固定路线自动驾驶游览车系统结构框图;
21.图2是本发明的景区固定路线自动驾驶游览车系统场景示意图;
22.其中:
23.1-1、景区固定黑色封闭道路;1-2、自动驾驶游览车;1-3、游览车本体;1-4、黑色站点停车线;
24.1、感知系统;2、供电系统;、3、自动驾驶游览车控制驱动系统;4、电动驱动系统;5、电动转向系统;6、电动制动系统;7、车门控制系统;8、5g通信模块;9、车速传感器;
25.11、左红外循迹传感器;12、右红外循迹传感器;13、前方超声波传感器一;14、前方超声波传感器二;15、前方超声波传感器三;16、侧门红外传感器;
26.21、可充电电池;22、太阳能充电系统;23、太阳能面板;
27.31、单片机最小系统;32、直流供电电源模块;33、直流电机驱动模块;34、伺服电机驱动模块;35、蜂鸣器报警模块;
28.41、直流电机一;42、直流电机二;43、左前驱动轮;44、右前驱动轮;
29.51、伺服电机一;52、转向机构;
30.61、直流电机三;62、直流电机四;63、左后制动轮;64、右后制动轮;
31.71、直流电机五;72、车门驱动装置;73、伺服电机二;74、车门门锁开关。
具体实施方式
32.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。
33.如图1至图2所示,本发明是一种景区固定路线自动驾驶游览车系统,采用低成本的超声波雷达实现避障和采用低成本的红外循迹传感器实现循迹,替代昂贵的摄像头、毫米波雷达和激光雷达,既能够满足低速固定路线自动驾驶游览车的自动载客需求,又可以有效解决运营成本高的问题。
34.具体的说,如图1至图2所示,包括景区固定黑色封闭道路1-1和自动驾驶游览车1-2;
35.所述自动驾驶游览车1-2包括游览车本体1-3以及与游览车本体1-3连接的感知系统1、供电系统2、自动驾驶游览车控制驱动系统3、电动驱动系统4、电动转向系统5、电动制动系统6、车门控制系统7、5g通信模块8和车速传感器9。
36.所述感知系统1包括左红外循迹传感器11、右红外循迹传感器12、前方超声波传感器一13、前方超声波传感器二14、前方超声波传感器三15和侧门红外传感器16,所述左红外循迹传感器11、右红外循迹传感器12与游览车本体1-3的底部对称连接,所述前方超声波传感器一13、前方超声波传感器二14、前方超声波传感器三15与游览车本体1-3前方连接,所述侧门红外传感器16与游览车本体1-3的侧门位置连接。其中,左红外循迹传感器11、右红外循迹传感器12用于沿着景区固定黑色封闭道路1-1循迹。前方超声波传感器一13、前方超声波传感器二14、前方超声波传感器三15用于避障。侧门红外传感器16用于探测是否有人上下车以及上下车人数计数。
37.所述供电系统2包括可充电电池21、太阳能充电系统22和太阳能面板23,所述太阳能面板23与游览车本体1-3的车顶连接,太阳能面板23接收光照通过太阳能充电系统22给可充电电池21充电,延长电池续航时间,所述可充电电池21也设置外接充电接口直接充电。
38.所述自动驾驶游览车控制驱动系统3包括单片机最小系统31、直流供电电源模块32、直流电机驱动模块33、伺服电机驱动模块34和蜂鸣器报警模块35。
39.所述电动驱动系统4包括直流电机一41、直流电机二42、左前驱动轮43和右前驱动轮44,所述直流电机驱动模块33控制直流电机一41驱动左前驱动轮43,所述直流电机驱动模块33控制直流电机二42驱动右前驱动轮44。实现车辆前进或者后退。
40.所述电动转向系统5包括伺服电机一51和转向机构52,所述伺服电机驱动模块34控制伺服电机一51驱动转向机构52控制转向。实现左前驱动轮43和右前驱动轮44转向。
41.所述电动制动系统6包括直流电机三61、直流电机四62、左后制动轮63和右后制动轮64,所述直流电机驱动模块33控制直流电机三61制动左后制动轮63,所述直流电机驱动模块33控制直流电机四62制动右后制动轮64。实现左后制动轮63和右后制动轮64制动。
42.所述车门控制系统7包括直流电机五71、车门驱动装置72、伺服电机二73和车门门锁开关74,所述直流电机驱动模块33控制直流电机五71带动车门驱动装置72驱动车门的左右移动,所述伺服电机驱动模块34控制伺服电机二73驱动车门门锁开关74的开闭。
43.当车门关闭过程中,侧门红外传感器16有返回信号时,表示检测到有人上车时,暂停车门关闭;当侧门红外传感器16无返回信号时,表示无人上车,此时可以继续关闭车门。当车门完全关闭后,通过伺服电机驱动模块34控制伺服电机二73驱动车门门锁开关74闭合,关闭车门,防止车辆行驶过程中车门意外打开,保证了行车安全。
44.所述左红外循迹传感器11和右红外循迹传感器12安装在游览车本体1-3底盘距离车头1/5底盘位置,所述左红外循迹传感器11和右红外循迹传感器12在游览车本体1-3底盘宽度方向为2/3底盘宽。
45.所述景区固定黑色封闭道路1-1采用黑色油漆粉刷,所述景区固定黑色封闭道路1-1的宽度为游览车本体1-3底盘宽度的1/2。
46.所述5g通信模块8主要实现自动驾驶游览车1-2和远程控制中心和监控中心的通信,远程控制中心可以对自动驾驶游览车1-2进行远程控制和状态监控。
47.车速传感器9用于检测车辆当前车速,用于控制车辆匀速行驶以及加速和减速时的速度反馈。
48.以下用具体实施例对具体工作方式进行阐述:
49.实施例1:
50.左红外循迹传感器11、右红外循迹传感器12用于沿着景区固定黑色封闭道路1-1循迹,使车辆沿着景区固定黑色封闭道路1-1行驶。
51.当左红外循迹传感器11无返回信号,右红外循迹传感器12有返回信号,此时说明车辆向右偏离景区固定黑色封闭道路1-1,通过控制电动转向系统5左转。
52.当左红外循迹传感器11、右红外循迹传感器12均有返回信号,此时说明车辆未偏离景区固定黑色封闭道路1-1,通过控制电动转向系统5直行。
53.当左红外循迹传感器11有返回信号,右红外循迹传感器12无返回信号,此时说明车辆向左偏离景区固定黑色封闭道路1-1,通过控制电动转向系统5右转。
54.车速传感器9用于检测车辆车速记为v,单位m/s。
55.左转和右转的角度记为α,单位为
°
。计算公式为α=c/v,其中:v为当前车速。c为常数,通过标定的方式确定,通常取30。假设车辆行驶速度v=10m/s,转向角度α约为3
°
。
56.电动驱动系统4用于驱动自动驾驶游览车1-2匀速行驶。通过车速传感器9反馈车辆行驶速度实现速度闭环控制。
57.前方超声波传感器一13、前方超声波传感器二14、前方超声波传感器三15检测前方障碍物的距离,检测距离分别记为d1,d2,d3。对d1,d2,d3进行融合得到距离前方障碍物距离记为d,d=min{d1,d2,d3},即取最小距离为前方障碍物距离。
58.当车辆匀速行驶车速为v时,假设电动制动系统6能够提供的制动减速度为a,单位m/s2,则障碍物距离d小于v2/2a时对车辆实施制动,减速避撞。假设a=5.0m/s2,当车速为4m/s时,最小安全距离d约为1.6m。
59.当左红外循迹传感器11无返回信号,右红外循迹传感器12无返回信号,此时说明车辆运行到黑色站点停车线1-4处。此时通过控制电动制动系统6让车辆减速停车。等待设定时间,例如60s,同时通过侧门红外传感器16检测到没有人上车时,通过蜂鸣器报警模块35提醒,同时通过车门控制系统7控制车门完全关闭后,关闭车门门锁。车门门锁关闭后,通过电动驱动系统4驱动车辆继续行驶,并设定延时时间,例如1s后,当左红外循迹传感器11
和右红外循迹传感器12驶过黑色站点停车线1-4后,开启左红外循迹传感器11和右红外循迹传感器12实时检测车辆是否偏离景区固定黑色封闭道路1-1。
60.本发明的景区固定路线自动驾驶游览车系统,采用低成本的超声波雷达实现避障和采用低成本的红外循迹传感器实现循迹,替代昂贵的摄像头、毫米波雷达和激光雷达,既能够满足低速固定路线自动驾驶游览车的自动载客需求,又可以有效解决运营成本高的问题。
61.本发明的景区固定路线自动驾驶游览车系统,通过两路红外循迹传感器可以实现循迹、识别停车站点、计数运行趟数和识别起始点,在不增加成本的情况下,实现了更多的功能。
62.本发明的景区固定路线自动驾驶游览车系统,侧门红外传感器16可以检测是否有人上车,当没有人上车时,可以提前开车,提高车辆运行效率。
63.本发明的景区固定路线自动驾驶游览车系统,为了避免左红外循迹传感器11和右红外循迹传感器12受太阳强光线的影响,车辆四周底部装有遮光帘,用于遮挡强光。
64.实施例2:
65.在实施例1的基础上,车辆经过黑色站点停车线1-4时,自动计数,通过计数计算循环趟数以及车辆所处大致位置,比如处于哪两个站点之间。当车辆运行趟数超过设定趟数或者到达车辆运行设定时间后,车辆运行到起始站点后停止并关闭系统。
66.以上结合附图对本发明进行了示例性描述,显然,本发明具体实现并不受上述方式的限制,只要是采用了本发明的方法构思和技术方案进行的各种非实质性的改进;或未经改进,将本发明的上述构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1