一种用于车衣的控制装置及其控制方法
1.本发明属于汽车防护技术领域,具体涉及一种用于车衣的控制装置及其控制方法。
背景技术:
2.随着经济的发展,城市加强园区建设、推动产业集聚;园区是项目建设的主战场,是创新创业的主阵地,事关城市经济社会发展大局。建设园区为吸引人才汇聚,进而打造人才兴、平台聚、产业旺、科技融的发展格局。良好的园区物业服务也能在吸引人才上锦上添花,给人才带来更佳的舒适便利感。园区物业服务其中一项服务为:为人才提供停车位。
3.现有园区中的停车位主要包括地下和室外两种。地下停车位能很好地防护车辆,避免了车辆被阳光暴晒,但室外停车位则不能达到如此的效果。车辆停在室外停车位时,只能被暴晒,车内温度升高。虽然车主个人可以准备车衣为车辆做防护,但每天都需要时间安装或拆卸车衣,操作繁琐,浪费个人时间。
技术实现要素:
4.发明目的:为了解决上述问题,本发明提供了一种用于车衣的控制装置及其控制方法。
5.技术方案:一种用于车衣的控制装置,包括:收纳机构,包括转动件,以及传动连接于所述转动件的驱动组件;所述转动件转动时以便车衣的放卷或收纳;至少两组直线运动机构,设于所述收纳机构两侧;所述直线运动机构包括:固定组件,以及传动连接于所述固定组件的运动组件;至少两组第一支撑机构包括连接于车衣首端的第一支撑件,以及一端连接于所述第一支撑件且另一端连接于所述运动组件的第二支撑件;至少两组第二支撑机构,包括若干个设于车衣两侧边缘的感应组件,以及至少两组一端连接于所述运动组件且另一端连接于所述感应组件的第三支撑件;控制单元,同时连接于所述收纳机构、直线运动机构、第一支撑机构以及第二支撑机构。
6.在进一步的实施例中,所述收纳机构还包括:设于所述转动件一侧的引导台,以及设于所述引导台上的限位杆。
7.通过采用上述技术方案,限位杆与引导台的顶面之间留有间隙,从转动件放卷出的车衣从间隙中穿过,引导台的台面与车衣接触,对车衣运动起到一个引导作用,限位杆对车衣起到限位的作用,防止车衣自身凌乱。
8.在进一步的实施例中,所述固定组件包括:直线滑轨,以及设于所述直线滑轨末端的固定座;所述固定座内设置有限位组件;所述运动组件包括:滑动连接于所述直线滑轨的滑动座,以及设于所述滑动座顶面的安装座;所述安装座内具有安装空间;所述滑动座的一侧面上设置有与所述限位组件适配连接的连接件。
9.通过采用上述技术方案,滑动座可沿直线滑轨长度放线上运动,当滑动座靠近固定座时,连接件与限位组件卡接,对滑动座进行限位,防止其在不工作时位置发生变化。
10.在进一步的实施例中,所述限位组件包括:设于所述固定座内部的固定板,以及两组固定于所述固定板上且镜像设置的异形件;两组异形件之间留有间隙;所述异形件包括:弧形部,一端连接于弧形部的直部,以及从所述直部末端沿靠近间隙方向延伸的柔性部;两组柔性部之间留有预定距离;所述连接件包括:固定于所述滑动座侧面的第一轴部,以及连接于所述第一轴部的第二轴部;所述第二轴部直径大于第一轴部直径;所述预定距离与第一轴部直径相同。
11.通过采用上述技术方案,滑动座靠近固定座时,第二轴部、第一轴部依次穿过通孔,第二轴部穿过柔性部之间的间隙,与柔性部卡紧,第一轴部与柔性部抵接,当关闭滑动座的电源时,由于第二轴部与柔性部的卡紧,实现滑动座的定位,防止滑动座滑动。
12.在进一步的实施例中,所述第二支撑件与安装座之间、第三支撑件与安装座之间均设置有角度调节组件;所述角度调节组件包括:转动底盘,两组对称设于所述转动底盘的连接板,贯穿所述连接板的连接轴,以及传动连接于所述连接轴的驱动电机。
13.通过采用上述技术方案,转动底盘可实现第二支撑件(或第三支撑件)自转,驱动电机驱动连接轴转动时,带动第二支撑件(或第三支撑件)转动。
14.在进一步的实施例中,所述感应组件包括:固定于车衣边缘上的连接环,以及设于车衣边缘且靠近连接环设置的定位芯片;所述连接环内设置有连接架。
15.通过采用上述技术方案,定位芯片采用gps定位芯片
16.在进一步的实施例中,所述第二支撑机构还包括:夹紧件,设于所述第三支撑件端部;所述夹紧件为电动夹爪。
17.通过采用上述技术方案,夹紧件夹紧连接环时,夹持部穿过连接架与连接环之间的间隙,对连接环施加作用力,以保证夹紧件夹持住连接环;夹紧件夹紧连接环,进而对车衣有一个夹紧力,防止车衣漂浮。
18.一种用于车衣的控制方法,其特征在于,应用于上述的一种用于车衣的控制装置,包括以下步骤:
19.预先设置控制指令,所述控制指令包括第一指令和第二指令;当需要使用车衣时,执行第一指令;所述第一指令用于指示收纳机构对车衣放卷,并指示运动组件远离收纳机构,在车衣按照需求覆盖汽车车身后,指示第三支撑件靠近并与感应组件之间具有夹紧力;或,当需要收起车衣时,执行第二指令;所述第二指令用于指示第三支撑件与感应组件分离,并指示运动组件靠近收纳机构,且收纳机构对车衣收卷。
20.在进一步的实施例中,还包括以下流程:获取停车位长度δ、车衣的初始高度η、以及待覆盖汽车的最高高度φ并形成信息库,基于所述信息库计算车衣的伸长量ξ;待覆盖汽车的最高高度测量方法如下:
21.对待覆盖汽车进行图像采集并形成图像信息;对所述图像信息进行处理和分析并得到汽车轮廓信息;
22.从所述轮廓信息中选取汽车的最低点e和最高点f,以及点e的像素坐标(ue,ve),点f的像素坐标(uf,vf);利用计算公式求出e、f两点在相机坐标下,y向的坐标值ye、yf;计算公式如下:
23.24.其中,a为常数系数,f为相机的焦距,θ为相机与水平方向的夹角,v为现实世界物体y在图像上的像素值,dy为一个像素在v轴方向上的尺度;
25.待覆盖汽车的最高高度φ值为:φ=y
f-ye;车衣的伸长量ξ满足以下计算公式:ξ=δ+2*(φ-η)。
26.在进一步的实施例中,第三支撑件靠近并与感应组件之间具有夹紧力,具体包括以下流程:在车衣覆盖汽车车身时,获取此时车衣上的定位芯片的位置信息并形成位置信息库;基于位置信息库以及第三支撑件的数量,设定特定连接环;控制第三支撑件向对应的特定连接环靠近,并驱动夹紧件夹紧特定连接环。
27.有益效果:控制器控制收纳机构对车衣放卷,并控制运动组件远离收纳机构,在车衣覆盖汽车车身后,控制第三支撑件靠近并与感应组件之间具有夹紧力,进而实现车衣对车身的覆盖防护;或者控制器控制第三支撑件与感应组件分离,并控制运动组件靠近收纳机构,且控制收纳机构对车衣收卷,进而实现车衣与车身分离并收卷;车衣覆盖汽车或分离汽车,这些过程中,无需人力,全自动控制,物业人员只需根据实际情况遥控设置即可,省时省力,节约车主时间。
附图说明
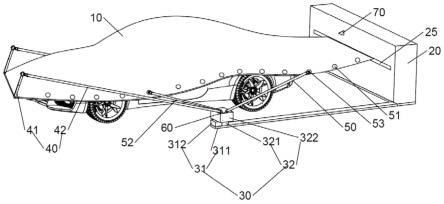
28.图1是本发明的结构示意图。
29.图2是收纳机构内部结构俯视图。
30.图3是驱动组件的结构示意图。
31.图4是收纳结构内部结构侧视图。
32.图5是限位组件与连接件的结构示意图。
33.图6是角度调节组件的结构示意图。
34.图7是连接环的结构示意图。
35.图8是夹紧件的结构示意图。
36.图1至图8中各标注为:车衣10、收纳机构20、转动件21、驱动组件22、伺服电机221、主动轮222、从动轮223、第一齿轮轴224、第二齿轮轴225、第三齿轮轴226、第一齿轮227、第二齿轮228、第三齿轮229、第四齿轮2210、引导台23、限位杆24、车衣出口25、直线运动机构30、固定组件31、直线滑轨311、固定座312、限位组件313、固定板3131、异形件3132、弧形部31321、直部31322、柔性部31323、运动组件32、滑动座321、安装座322、连接件323、第一轴部3231、第二轴部3232、第一支撑机构40、第一支撑件41、第二支撑件42、第二支撑机构50、感应组件51、连接环511、连接架512、第三支撑件52、夹紧件53、安装架531、夹紧部532、电动液压杆533、角度调节组件60、转动底盘61、连接板62、连接轴63、驱动电机64、工业ccd相机70。
具体实施方式
37.实施例1
38.如图1至8所示,本实施例提供了一种用于车衣10的控制装置,包括:收纳机构20,直线运动机构30,第一支撑机构40,第二支撑机构50,以及控制单元。收纳机构20包括转动件21,以及与转动组件的驱动组件22。转动件21可为转辊,车衣10收卷在转动件21上,驱动组件22驱动转动件21转动。转动件21转动时,实现车衣10的放卷或收纳。驱动组件22包括:
伺服电机221,连接于所述伺服电机221输出端的主动轮222,通过传动链条连接于所述主动轮222的从动轮223,连接于所述从动轮223的第一齿轮轴224,传动连接于所述第一齿轮轴224上的第二齿轮轴225,以及传动连接于所述第二齿轮轴225的第三齿轮轴226;所述第三齿轮轴226与转动件21连接。第一齿轮轴224上设置有第一齿轮227,第二齿轮轴225上设置有第二齿轮228,第三齿轮229,第三齿轮轴226上设置第四齿轮2210,第一齿轮227与第二齿轮228啮合传动,第三齿轮229与第四齿轮2210啮合传动。第二齿轮228外径大于第一齿轮227外径,第四齿轮2210外径大于第三齿轮229外径。伺服电机221驱动主动轮222转动,主动轮222通过传动链条传动带动从动轮223转动,从动轮223带动第一齿轮轴224转动,第一齿轮轴224带动第二齿轮轴225转动,第二齿轮轴225带动第三齿轮轴226转动,第三齿轮轴226带动转动件21转动。第二齿轮228外径大于第一齿轮227外径,第四齿轮2210外径大于第三齿轮229外径,第一齿轮轴224转动速度大于第二齿轮轴225,第二齿轮轴225转动速度大于第三齿轮轴226和转动件21,进而实现一个减速的过程,使得转动件21转动时,转动速度平缓,平缓放卷或收纳车衣10,车衣10平缓的运动避免了出现车衣10速度过快导致多度拉伸车衣10的情况,提高车衣10在反复放卷或收纳的场景下的寿命。
39.在本实施例中,两组直线运动机构30安装在收纳机构20的两侧,直线运动机构30包括固定组件31,以及与固定组件31传动连接的运动组件32。固定组件31的长度方向与汽车车身长度方向平行。
40.第一支撑机构40,至少包括:第一支撑件41,以及第二支撑件42。第一支撑件41与车衣10首端固定连接,第二支撑件42一端与第一支撑件41连接,另一端与运动组件32连接。第一支撑件41为直杆,第二支撑件42为电动伸缩杆。第一支撑件41与第二支撑件42之间铰接,如采用万向节连接或十字节连接。车衣10两侧均设置有第一支撑机构40。
41.在本实施例中,第二支撑机构50为两组,第二支撑机构50至少包括若干组安装在车衣10两侧的感应组件51,以及至少两组一端连接于运动组件32且另一端连接于感应组件51的第三支撑件52;在本实施例中,第三支撑件52为两组直杆,具体分为第一支撑杆,和第二支撑杆。
42.控制单元包括控制器和计算机,控制器和计算机之间为通信连接。控制器和计算机同时与收纳机构20,直线运动机构30,第一支撑机构40、第二支撑机构50、角度调节组件60以及夹紧件53通讯连接,控制器为plc控制器,计算机可进行数值计算,又可进行逻辑计算,还具有存储记忆功能。当逻辑计算简单时,可单独使用plc控制器。
43.由于车衣10材质轻薄的,转动件21转动收纳或放卷时,容易凌乱,所以收纳机构20还包括:设于转动件21一侧的引导台23,以及设于引导台23上的限位杆24。限位杆24安装在引导台23的顶面上,限位杆24与引导台23的顶面之间留有间隙。从转动件21放卷出的车衣10从间隙中穿过。引导台23的台面与车衣10接触,对车衣10运动起到一个引导作用,限位杆24对车衣10起到限位的作用,防止车衣10自身凌乱。收纳机构20还包括壳体。在驱动组件22,转动件21,引导台23以及限位杆24外设置一个壳体,壳体上开设有车衣出口25,壳体对收纳机构20以及车衣10起到一个保护作用。
44.固定组件31包括:直线滑轨311,以及设于直线滑轨311末端的固定座312;固定座312内设置有限位组件313。园区内的停车位一般设置为矩形,收纳机构20设置在矩形的末端,直线滑轨311从收纳机构20开始延伸,并沿着停车位长度方向开始延伸,直线滑轨311的
长度设置为停车位长度的1/3~1/2,直线滑轨311长度不可过长,否则影响车主停车,也不能过短,否则距离车头过远,导致第一支撑件41和第二支撑件42的不稳定。固定座312固定在直线滑轨311远离收纳机构20的末端上。固定座312内具有容置空间,用于安装限位组件313。运动组件32包括:滑动连接于直线滑轨311的滑动座321,以及设于滑动座321顶面的安装座322;所述安装座322内具有安装空间;滑动座321的一侧面上设置有与限位组件313适配连接的连接件323。滑动座321与直线滑轨311滑动连接,滑动座321为电动滑动座321,自身内部具有动力源,或者说,滑动座321的运动方式类似电动小车玩具可在底面上运动或电动火车玩具可在轨道运动,此为现有技术,具体结构在此不做赘述。滑动座321与直线滑轨311适配连接,实现滑动座321可沿直线滑轨311长度方向运动。安装座322固定在滑动座321顶面,安装座322内开设有安装空间。滑动座321靠近固定座312的一侧面上设置有与限位组件313适配连接的连接件323。通过限位组件313与连接件323的连接,使得滑动座321不工作时,能保持静止,位置不会发生变化,进而使得第一支撑机构40和第二支撑机构50位置不会发生变化,为车衣10提供稳定平衡的支撑力。
45.限位组件313包括:固定在固定座312内部的固定板3131,以及两组固定在固定板3131上且镜像设置的异形件3132;两组异形件3132的相邻端部之间留有间隙;异形件3132包括:弧形部31321,一端连接于弧形部31321的直部31322,以及从直部31322末端沿靠近间隙方向延伸的柔性部31323;两组柔性部31323之间留有预定距离;弧形部31321与直部31322一体形成。固定座312上开设有通孔。连接件323包括:固定在滑动座321侧面的第一轴部3231,以及固定连接于第一轴部3231的第二轴部3232;第二轴部3232直径大于第一轴部3231直径;预定距离与第一轴部3231直径相同。滑动座321靠近固定座312时,第二轴部3232、第一轴部3231依次穿过通孔,第二轴部3232穿过柔性部31323之间的间隙,与柔性部31323卡紧,第一轴部3231与柔性部31323抵接,当关闭滑动座321的电源时,由于第二轴部3232与柔性部31323的卡紧,实现滑动座321的定位,防止滑动座321滑动。
46.在第二支撑件42与安装座322之间,第三支撑件52与安装座322之间均设置有角度调节组件60,角度调节组件60安装在安装座322内。角度调节组件60包括:转动底盘61,两组对称设于转动底盘61的连接板62,贯穿所述连接盖板的连接轴63,以及传动连接于所述连接轴63的驱动电机64。转动底盘61采用电机、螺纹杆以及齿轮传动,如电机输出端与螺纹杆连接,螺纹杆与齿轮传动连接,转动底盘61通过轴与齿轮连接,进而电机驱动螺纹杆转动,进而螺纹杆带动齿轮转动,进而齿轮带动转动底盘61转动。连接板62安装在转动底盘61上。连接轴63贯穿连接板62,并与连接板62通过轴承连接。驱动电机64与连接轴63传动连接。第二支撑件42(或第三支撑件52)端部安装在连接轴63上。驱动电机64驱动连接轴63转动时,带动第二支撑件42(或第三支撑件52)转动。
47.感应组件51包括:固定在车衣10边缘上的连接环511,以及安装在车衣10边缘且靠近连接环511设置的定位芯片。定位芯片采用gps定位芯片。连接环511内固定安装有连接架512,连接架512有多个直杆以连接环511圆心为重合点交叉排列组成,连接架512与连接环511之间具有间隙。
48.第二支撑机构50还包括夹紧件53,夹紧件53安装在第三支撑件52端部。夹紧件53为电动夹爪,电动夹爪至少包括:多组夹紧部532,夹紧部532的尺寸小于连接架512与连接环511之间的间隙。电动夹爪包括:安装架531,多组铰接于所述安装架531的夹紧部532,以
及一端连接于所述安装架531且一端铰接于夹紧部532的电动液压杆533。通过电动液压杆533的伸缩带动,夹紧部532的收合。夹紧件53夹紧连接环511时,夹持部穿过连接架512与连接环511之间的间隙,对连接环511施加作用力,以保证夹紧件53夹持住连接环511。
49.实施例2
50.本实施例提供了一种用于车衣10的控制方法(以下简称该方法),应用于实施例1中的一种用于车衣10的控制装置。该方法包括以下步骤:
51.预先设置控制指令,所述控制指令包括第一指令或第二指令;当需要使用车衣10时,执行第一指令;所述第一指令用于指示收纳机构20对车衣10放卷,并指示运动组件32远离收纳机构20,在车衣10按照需求覆盖汽车车身后,指示第三支撑件52靠近并与感应组件51之间具有夹紧力;或,当需要收起车衣10时,执行第二指令;所述第二指令用于指示第三支撑件52与感应组件51分离,并指示运动组件32靠近收纳机构20,且收纳机构20对车衣10收卷;
52.根据所述第一指令控制收纳机构20对车衣10放卷,并控制运动组件32远离收纳机构20,在车衣10覆盖汽车车身后,控制第三支撑件52靠近并与感应组件51之间具有夹紧力;或者根据所述第二指令控制第三支撑件52与感应组件51分离,并控制运动组件32靠近收纳机构20,且控制收纳机构20对车衣10收卷。
53.具体说明如下:实施例1中的控制器与所有驱动源通讯(包括上述已经提及的驱动源,以及隐含的驱动源)连接。在控制器上预先设置控制指令,控制指令包括第一指令和第二指令。当车主将汽车停放至停车位上,物业管理人员可通过遥控装置,如红外遥控器,操作控制器去执行第一指令或第二指令。
54.在初始状态时,滑动座321靠近收纳机构20,第二支撑件42和第三支撑件52保持竖直,且第二支撑件42属于未拉长状态,或者说第二支撑件42处于最短状态(最短状态高度小于车衣出口25高度)。当物业管理人员发现汽车处于停车位上时并发现需要对汽车进行遮挡防护时,操作控制器执行第一指令。控制器控制驱动组件22工作并带动转动件21转动,转动件21对车衣10放卷,同时,控制器控制运动组件32远离收纳机构20,进而运动组件32带动第一支撑件41,第二支撑件42,以及第三支撑件52远离收纳机构20;在此过程中,第二支撑件42跟随运动组件32运动过程中,控制器控制第二支撑件42伸长,车衣10被第一支撑件41带动车衣10从车衣出口25覆盖汽车车身;直至运动组件32中的滑动座321与固定座312接触,滑动座321停止运动。控制器控制第二支撑杆端部的角度调节组件60,角度调节组件60调整第二支撑杆与水平面的夹角,设定该夹角在初始状态时,该夹角为90
°
,随着角度调节组件60调整,该夹角慢慢变小,该夹角在30
°
~60
°
范围内。第二支撑件42的伸长量设置为当第二支撑件42处于最大伸长长度时,其端部的向下投影点在停车位的首端(设定收纳机构20位于停车位的末端)。当需要收起车衣10时,执行第二指令,各个部件回归初始状态。
55.停车位上的汽车品牌随机,使得汽车的长度、高度不是统一的,所以车衣10覆盖在汽车车身上的覆盖度也随机,为了尽可能地提高车衣10覆盖度,提出了以下技术方案:
56.在进一步的实施例中,获取停车位长度、车衣10的初始高度、以及待覆盖汽车的最高高度并形成信息库,基于所述信息库计算车衣10的伸长量。停车位长度采用人工测量得到,停车场中每个停车位长度的相同。车衣10的初始高度为车衣出口25的高度,车衣出口25的高度采用人工测量。停车位长度δ和车衣10的初始高度η这两个数值固定,提前输入至计
算机中。待覆盖汽车的最高高度,由于汽车品牌不同,其数值也是随机的,所以,其测量采用视觉测量。
57.视觉测量方法如下:设置单组工业ccd相机70。工业ccd相机70对汽车车身进行图像采集形成图像信息,将图像信息传输至计算机中,计算机对图像信息进行分析和计算,该工业ccd设置在收纳机构20上,拍摄方向为从收纳机构20向车身拍摄。拍摄的图像为平面图像,计算机对平面图像进行灰度处理,选取平面图像的轮廓信息,从轮廓信息中选取汽车的最低点e和最高点f,以及点e的像素坐标(ue,ve),点f的像素坐标(uf,vf);求出e、f两点在相机坐标下,y向的坐标值ye、yf;其中,a为常数系数,a取值为δ/2,f为相机的焦距,θ为工业ccd相机70与水平方向的夹角,v为现实世界物体y在图像上的像素值,dy为一个像素在v轴方向上的尺度;由此待覆盖汽车的最高高度φ为:φ=y
f-ye。停车位长度δ、车衣10的初始高度η、以及待覆盖汽车的最高高度φ形成信息库,计算机基于信息库中的数值,计算车衣10的伸长量ξ。车衣10的伸长量为车衣10从车衣出口25中伸出的车衣10长度。车衣10的伸长量ξ计算满足以下计算公式:ξ=δ+2*(φ-η)。计算出的车衣10的伸长量,满足不同类型的车的覆盖,提高对汽车的覆盖度,提高防护性能。计算机计算出车衣10的伸长量后,并该数值传输至控制器中,控制器根据数值控制收纳机构放卷车衣。
58.在另一个应用场景下,一个停车位始终对应一个车主,该停车位始终停放一种品牌的汽车,该汽车的高度,长度不会发生变化。当该车主对汽车的防护需求不同时,车衣10的伸长量也会发生变化。当车主不需要对全车身进行防护时,车主的防护需求为对汽车进行部分防护,换句话说,只需要对车身进行1/3或1/4等长度防护。设定需要防护的车身最高点为g,通过实施例2中的公式,计算出该点g高度为φ’,则此时车衣10伸长量ξ’为:ξ’=(φ
’‑
η)/sinα,其中,η为车衣10的初始高度,α为g与车衣10出口的连线与水平线的夹角。
59.由于车衣10属于轻薄的材质,当车衣10覆盖汽车车身后,车衣10容易因为风向或其他外力飘动,导致车衣10不能稳定地覆盖汽车,为了解决此问题,提出了以下技术方案:
60.在进一步的实施例中,第三支撑件52靠近并与感应组件51之间具有夹紧力,具体包括以下流程:
61.在车衣10覆盖汽车车身时,获取此时车衣10上的定位芯片的位置信息并形成位置信息库;定位芯片为gps定位芯片,计算机可实时收录定位芯片以及其附件的连接环511信息;即有多少个定位芯片就有多少个连接环511。
62.基于位置信息库以及第三支撑件52的数量,设定特定连接环511;具体说明:第三支撑件52为q组,则设定q组特定连接环511。从覆盖车身的车衣10上的连接环511中选取车衣10的伸长量为ξ,获取ξ长度的车衣10上所有的定位芯片数量为k,连接环511数量也为k组,从k组的连接环511中选取q组特定连接环511。在本实施例中,车衣10一侧都安装有两组第三支撑件52,则需选两组特定连接环511将ξ长度的车衣10等分成三份,即设置两组等分点;从等分点附近选取距离其最近的连接环511,则选取出两组特定连接环511。计算机选取特定连接环511后,将信息传输至控制器,控制器根据信息控制第三支撑件52。
63.控制第三支撑件52向对应的特定连接环511靠近,并驱动夹紧件53夹紧连接环511。夹紧件53夹紧连接环511,进而对车衣10有一个夹紧力,防止车衣10漂浮。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1