一种刹车油门防错系统的制作方法
1.本发明涉及一种防错系统,特别涉及一种刹车油门防错系统。
背景技术:
2.随着经济的快速发展,人民生活水平逐步提高,汽车也走进了寻常百姓家。随着汽车保有量的不断增长,汽车安全事故的发生率也在不断增加。其中在紧急情况下,错把油门当刹车造成的汽车安全事故已经屡见不鲜。
3.为了解决这一问题,现有车辆一般通过搭载防错系统或紧急制动装置来防止此类事件的发生,如专利cn113879292a(紧急制动方法、超声波雷达系统及aeb控制器),利用监测到的与障碍物的距离、油门踏板开度、刹车踏板状态、方向盘转速和方向盘转角,并对上述数据进行综合处理来判断驾驶员是否在执行刹车或避开障碍物的操作,所需要监测的数据过多,对监测设备的数量要求高,大大提高了防错系统的成本。
技术实现要素:
4.本发明的目的在于:针对现有技术中油门防错系统需监测数据种类多,处理复杂、成本高的问题,提供一种监测数据相对较少的刹车油门防错系统。
5.为了实现上述发明目的,本发明提供了以下技术方案:
6.一种刹车油门防错系统,进一步地,包括下列步骤:
7.s1:系统预定义:定义距离阀值l0,定义全油门时油门的预设开度为i0;
8.s2:车辆档位判断:若车辆属于行车挡或倒车挡,则继续往下执行;若车辆不属于行车挡或倒车挡,则返回s1;
9.s3:定义并检测实时距离l:若处于行车挡,则以车前障碍物离车头的实时距离为l;若处于倒车挡,则以车尾障碍物离车尾的实时距离为l;
10.s4:判断实时距离与预设距离关系:仅当满足l≤l0时,才继续往下执行;
11.s5:获取油门的实时开度i,并判断实时开度i与预设开度i0的关系,并根据二者所处的关系对车辆实行不同程度的行车控制。
12.采用上述技术方案的本发明,根据汽车在行驶过程中,车前车后障碍物距离车辆的距离和油门的开度情况,判断车辆的加速是否有效且在必要时自动进行刹车,可有效防止在紧急情况下,驾驶员错把油门当刹车错踩而引发汽车安全事故的发生,极大的提高了汽车的行驶安全。
13.进一步地,在s1中,预定义还包括踏板制动深度j1、j2、j3(j1≤30%、30%<j2≤70%、70%<j3≤100%)。分设几种不同深度的制度,提供多种选择。
14.进一步地,在s5中,开度判断与行车控制为:
15.当i≤i0/4时,判定该油门加速有效,执行该油门加速;
16.当i0/4<i≤i0/2时,判定该加速无效且执行制动深度为j1的制动;
17.当i0/2<i≤3i0/4时,判定该加速无效且执行制动深度为j2的制动;
18.当3i0/4<i≤i0时,判定该加速无效且执行制动深度为j3的制动。
19.分设四种不同范围的油门开度,对应四种不同的处理方式,其中一种是执行原油门的加速操作,另外三种为执行不同深度的制动。
20.进一步地,还包括s6:获取实时车速v,并判断v与0的关系,以进行相应的操作。
21.进一步地,若v≠0,则返回s4继续执行;若v=0,则继续往下执行。增加车速的判断,保证继续执行时车速为0。
22.进一步地,还包括s7:
23.判断车辆是否下电:若车辆已下电,则结束运行;若车辆未下电,则返回 s2继续执行。本方法的最终结果是车辆下电,从而结束整个判断方法的运行。。
24.进一步地,在s4中,若l》l0,可返回s1、s2或s3。
25.进一步地,在s1中,还包括上电过程,且上电过程和预定义的顺序可调换。预定义可为通用的预定义,位于上电之前;或也可为上电后再得到的预定义数据。
26.与现有技术相比,本发明的有益效果:
27.根据汽车在行驶过程中,车前车后障碍物距离车辆的距离和油门的开度情况,判断车辆的加速是否有效且在必要时自动进行刹车,可有效防止在紧急情况下,驾驶员错把油门当刹车错踩而引发汽车安全事故的发生,极大的提高了汽车的行驶安全。
附图说明:
28.构成本技术的一部分的说明书附图用来提供对发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
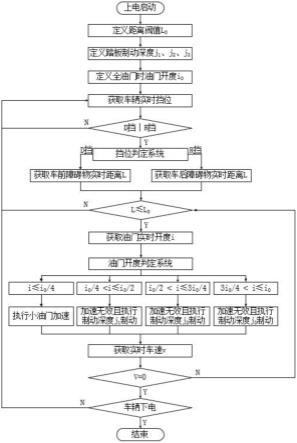
29.图1示出本发明刹车油门防错系统的流程图。
具体实施方式
30.需要指出的是,除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
31.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
32.如图1,为本发明一种实施例的流程图,该实施例的顺序为:
33.(1)上电启动;
34.(2)定义距离阈值l0;
35.(3)定义踏板制动深度;
36.(4)定义全油门时的油门开度i0;
37.(5)获取车辆实时档位;
38.(6)判断所处档位(是否处于行车挡或倒车挡,即是否处于d挡或r挡,如果是则继续往下执行,不是则返回5;
39.(7)根据车辆处于行车挡或倒车挡,定义车身与障碍物的实时距离l;
40.(8)判断距离阈值与实时距离的关系,满足关系式则继续进行,不满足则返回5;
41.(9)获取油门的实时开度i;
42.(10)进行油门开度的判定,分设四种范围,对应四种执行方式;
43.(11)获取车辆的实时车速v;
44.(12)判断实时车速v是否满足关系式,满足则继续进行,不满足则返回8;
45.(13)判断车辆是否下电,下电则整个流程结束,未下电则返回5。
46.一种刹车油门防错系统,进一步地,包括下列步骤:
47.s1:系统预定义:定义距离阀值l0,定义全油门时油门的预设开度为i0;
48.s2:车辆档位判断:若车辆属于行车挡或倒车挡,则继续往下执行;若车辆不属于行车挡或倒车挡,则返回s1;
49.s3:定义并检测实时距离l:若处于行车挡,则以车前障碍物离车头的实时距离为l;若处于倒车挡,则以车尾障碍物离车尾的实时距离为l;
50.s4:判断实时距离与预设距离关系:仅当满足l≤l0时,才继续往下执行;
51.s5:获取油门的实时开度i,并判断实时开度i与预设开度i0的关系,并根据二者所处的关系对车辆实行不同程度的行车控制。
52.采用上述技术方案的本发明,根据汽车在行驶过程中,车前车后障碍物距离车辆的距离和油门的开度情况,判断车辆的加速是否有效且在必要时自动进行刹车,可有效防止在紧急情况下,驾驶员错把油门当刹车错踩而引发汽车安全事故的发生,极大的提高了汽车的行驶安全。
53.进一步地,在s1中,预定义还包括踏板制动深度j1、j2、j3(j1≤30%、30%<j2≤70%、70%<j3≤100%)。分设几种不同深度的制度,提供多种选择。
54.进一步地,在s5中,开度判断与行车控制为:
55.当i≤i0/4时,判定该油门加速有效,执行该油门加速;
56.当i0/4<i≤i0/2时,判定该加速无效且执行制动深度为j1的制动;
57.当i0/2<i≤3i0/4时,判定该加速无效且执行制动深度为j2的制动;
58.当3i0/4<i≤i0时,判定该加速无效且执行制动深度为j3的制动。
59.分设四种不同范围的油门开度,对应四种不同的处理方式,其中一种是执行原油门的加速操作,另外三种为执行不同深度的制动。
60.进一步地,还包括s6:获取实时车速v,并判断v与0的关系,以进行相应的操作。
61.进一步地,若v≠0,则返回s4继续执行;若v=0,则继续往下执行。增加车速的判断,保证继续执行时车速为0。
62.进一步地,还包括s7:
63.判断车辆是否下电:若车辆已下电,则结束运行;若车辆未下电,则返回 s2继续执行。本方法的最终结果是车辆下电,从而结束整个判断方法的运行。。
64.进一步地,在s4中,若l》l0,可返回s1、s2或s3。
65.进一步地,在s1中,还包括上电过程,且上电过程和预定义的顺序可调换。预定义可为通用的预定义,位于上电之前;或也可为上电后再得到的预定义数据。
66.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修
改、等同替换、改进等,均应包含在本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1