用于确定车辆切入的装置和方法与流程
本公开的实施例涉及用于确定车辆的切入的装置和方法。
背景技术:
1、当使用adas驾驶车辆或通过自主驾驶驱动车辆时,重要的是快速识别在车辆前方切入的周围车辆。由于待切入的周围车辆与主车辆的距离为数米,当未立即识别出周围车辆的切入时,则可能发生事故。
2、因此,在相关技术中,已经提出了一种用于基于通过融合多个传感器而获得的前方车辆的轨迹信息来确定周围车辆的切入以确定驾驶情况的技术。然而,当输出错误的轨迹信息时,可能会影响周围车辆的切入判断逻辑,使得车辆即使在切入情况下也不会刹车,或者即使在非切入情况下也会被刹车,从而使乘员感到不舒服。
3、近来,随着诸如深度学习和强化学习的人工智能的研究活跃,已经开发了用于使用通过车辆相机或雷达和人工智能获得的信息来确定驾驶情况的技术。然而,当通过车辆的相机获得的图像输入到深度学习程序中时,计算量很大,并且仅通过雷达获得的信息很难获得高分辨率的输入数据,使得存在不识别或误识别低速切入车辆的可能性很高。
技术实现思路
1、已经做出本公开的实施例以解决现有技术中出现的上述问题,同时完整地保持现有技术实现的优点。
2、本公开的实施例提供一种用于确定切入的装置和方法,其能够通过使用基于通过激光雷达获得的信息的人工神经网络来准确地确定切入车辆。
3、本发明的实施例要解决的技术问题不限于上述问题,并且本公开的实施例所涉及的本领域技术人员通过以下描述将清楚地理解本文未提及的任何其它技术问题。
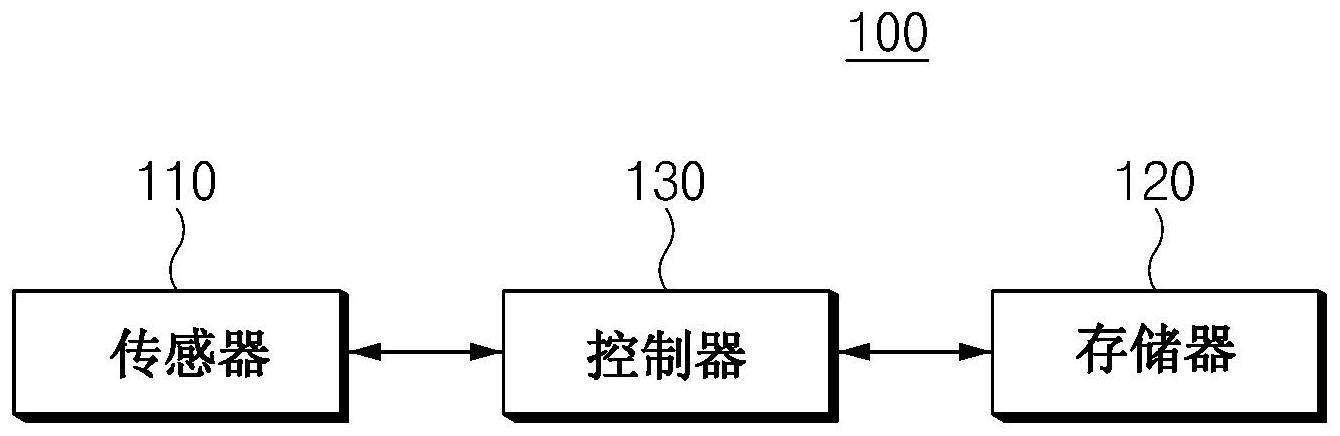
4、根据本公开的实施例,一种用于确定车辆切入的装置包括:传感器,其检测车辆周围以生成点云;以及控制器,其基于点云计算从起点到障碍物的距离,基于距障碍物的距离计算距离比,通过使用人工神经网络分析距离比,并确定周围车辆是否切入以及确定切入方向。
5、传感器可以包括向车辆周围环境输出激光的激光雷达。
6、控制器可以设定位于距传感器指定距离和指定角度内的检测区域,并从点云中提取包括在检测区域中的检测区域点云。
7、控制器可以基于提取的检测区域点云计算第一长度,该第一长度是从起点到终点的长度。
8、当障碍物存在于检测区域中时,控制器可以基于提取的检测区域点云计算检测区域的第二长度,该第二长度是从起点到障碍物的距离。
9、控制器可以计算通过将第二长度除以第一长度而获得的值,并将该值作为距离比。
10、控制器可以针对检测区域内的每个特定角度计算距离比,并通过处理距离比来生成输入向量。
11、人工神经网络可以包括长短期记忆(lstm)。
12、控制器可以基于通过使用人工神经网络分析的结果来确定周围车辆右切入、周围车辆左切入和周围车辆未切入之一。
13、根据本公开的另一个实施例,一种确定车辆切入的方法包括:由传感器检测车辆的周围环境,通过感测车辆的周围环境生成点云;基于点云计算从起点到障碍物的距离;基于到障碍物的距离计算距离比;以及通过使用人工神经网络分析距离比,以确定周围车辆是否切入以及确定切入方向。
14、传感器可以包括向车辆周围输出激光的激光雷达。
15、该方法还可以包括:设定位于距传感器指定距离和指定角度内的检测区域,并从点云中提取包括在检测区域中的检测区域点云。
16、该方法还可以包括:基于提取的检测区域点云计算第一长度,该第一长度是从起点到终点的长度。
17、该方法还可以包括:当障碍物存在于检测区域中时,基于提取的检测区域点云计算检测区域的第二长度,该第二长度是从起点到障碍物的距离。
18、距离比的计算可以包括:计算通过将第二长度除以第一长度获得的值,并将该值作为距离比。
19、该方法还可以包括:计算检测区域内每个特定角度的距离比,并通过处理距离比生成输入向量。
20、人工神经网络可以包括长短期记忆(lstm)。
21、该方法还可以包括基于通过使用人工神经网络分析的结果,确定周围车辆右切入、周围车辆左切入和周围车辆未发生切入之一。
22、如所讨论的,该方法和系统适当地包括使用控制器或处理器。
23、在另一方面,提供了包括如本文公开的装置的车辆。
24、在完全自主的车辆或系统中,车辆可以在所有条件下执行所有驾驶任务,并且很少或不需要人类驾驶员的驾驶辅助。例如,在半自主车辆中,自动驾驶系统可在某些条件下执行部分或全部驾驶任务,但人类驾驶员在某些条件下会重新获得控制权,或者在其它半自主驾驶系统中,车辆的自动驾驶系统可以在某些情况下监督转向和加速和制动,尽管人类驾驶员需要在整个旅程中继续关注驾驶环境,同时还要执行剩余的必要任务。
25、在某些实施例中,本系统和车辆可以是完全自主的。在其它某些实施例中,本系统和车辆可以是半自主的。
技术特征:
1.一种用于确定车辆切入的装置,所述装置包括:
2.根据权利要求1所述的装置,其中,所述传感器包括激光雷达,所述激光雷达被配置为向所述车辆的周围环境输出激光。
3.根据权利要求1所述的装置,其中,所述控制器还被配置为:设置位于距所述传感器指定距离和指定角度内的检测区域,并从所述点云中提取包括在所述检测区域中的检测区域点云。
4.根据权利要求3所述的装置,其中,所述控制器还被配置为:基于所提取的检测区域点云计算第一长度,所述第一长度是从所述起点到终点的长度。
5.根据权利要求4所述的装置,其中,所述控制器还被配置为:当在所述检测区域中存在所述障碍物时,基于所述提取的检测区域点云计算所述检测区域的第二长度,所述第二长度是从所述起点到所述障碍物的距离。
6.根据权利要求5所述的装置,其中,所述控制器还被配置为:计算通过将所述第二长度除以所述第一长度而获得的值,并将该值作为所述距离比。
7.根据权利要求6所述的装置,其中,所述控制器还被配置为:计算所述检测区域内的每个特定角度的所述距离比,并通过处理所述距离比来生成输入向量。
8.根据权利要求7所述的装置,其中,所述人工神经网络包括长短期记忆(lstm)。
9.根据权利要求8所述的装置,其中,所述控制器还被配置为:基于通过使用所述人工神经网络分析的结果,确定所述周围车辆右切入、所述周围车辆左切入和所述周围车辆未发生切入之一。
10.一种确定车辆切入的方法,所述方法包括:
11.根据权利要求10所述的方法,其中,所述传感器包括激光雷达,所述激光雷达被配置为向所述车辆的所述周围环境输出激光。
12.根据权利要求10所述的方法,还包括:
13.根据权利要求12所述的方法,还包括:
14.根据权利要求13所述的方法,还包括:
15.根据权利要求14所述的方法,其中,所述距离比的所述计算包括:
16.根据权利要求15所述的方法,还包括:
17.根据权利要求16所述的方法,其中,所述人工神经网络包括长短期记忆(lstm)。
18.根据权利要求17所述的方法,还包括:
技术总结
公开了一种用于确定车辆切入的装置和方法。该装置包括:传感器,检测车辆周围环境以生成点云;以及控制器,基于点云计算从起点到障碍物的距离、基于距障碍物的距离计算距离比、通过使用人工神经网络分析距离比,以及确定周围车辆是否切入并确定切入方向。因此,本发明可以通过最小化操作负荷以及提高确定性能的准确性来快速且准确地确定切入车辆。
技术研发人员:李南炯
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!