驻车辅助装置的制作方法
1.本公开涉及驻车辅助装置。
背景技术:
2.以往,利用搭载有免钥匙操作系统的车辆控制系统,该免钥匙操作系统以来自车辆的通信为契机,通过短距离无线通信进行电子钥匙的id校验,进行各种控制。例如,实现在车辆电源接通的状态下,电子钥匙被带出到车外的情况下输出警报,或者在电子钥匙存在于车内的情况下能够进行基于开关操作等起动发动机。在这样的车辆控制系统中,还提出了根据搭乘于车辆的乘员(搭乘者)的数量来决定电子钥匙的带出警报处理的执行与否的系统。
3.专利文献1:日本特开2013-100676号公报
4.然而,近年来,正在推进车辆的自动驾驶辅助技术的实用化。在自动驾驶辅助中,有在驾驶员(搭乘者)存在于车辆内的状态下执行的情况和驾驶员存在于车外的状态下执行的情况。特别是,在驾驶员存在于车外的状态下执行的、例如使车辆自动地移动至驻车空间的自动驻车辅助的情况下,需要准确地检测驾驶员的乘降状态,并且在车辆与驾驶员之间顺利地进行控制权限的交接。然而,此时,在存在多个电子钥匙的情况下,例如在同乘者也携带电子钥匙的情况下,难以准确地判定驾驶员的乘降,并且难以顺利地执行控制权限的交接这样的问题。
技术实现要素:
5.因此,本公开的课题之一在于,提供一种能够更准确地检测乘员(搭乘者)的乘降状态,能够更顺利地进行自动驾驶控制的控制权限的交接的驻车辅助装置。
6.本实施方式的驻车辅助装置,例如,具有:行驶辅助控制部,使车辆自动驾驶至被指定的驻车区域并驻车;检测部,对携带了终端装置的搭乘者是否在车辆的驾驶席进行了乘降行为进行检测,该终端装置能够对车辆进行行驶控制;以及权限决定部,基于检测部的检测结果,来决定车辆的行驶控制权限归属于行驶辅助控制部还是归属于搭乘者。根据该结构,例如,容易且准确地检测进行驾驶的搭乘者存在于车外还是存在于车内,能够顺利地且在适当的时刻决定使行驶控制权限归属于行驶辅助控制部还是归属于搭乘在主要管理车辆的驾驶席的搭乘者。
7.另外,本实施方式的驻车辅助装置的权限决定部例如也可以在作为乘降行为继驾驶席的门的打开动作之后检测到关闭动作的情况下,判定为搭乘者已下车并决定将行驶控制权限从搭乘者向行驶辅助控制部转移。根据该结构,例如,能够更准确地检测进行驾驶的搭乘者存在于车外的时刻,能够顺利地且在适当的时刻向行驶辅助控制部交接行驶控制权限。
8.另外,本实施方式的驻车辅助装置的检测部,例如,进一步检测终端装置是否存在于车辆的车厢内,权限决定部也可以在由检测部检测到终端装置存在于车厢内且作为乘降
行为检测到对驾驶席的驾驶操作部的操作的情况下,判定为搭乘者已乘车并决定将行驶控制权限从行驶辅助控制部向搭乘者转移。根据该结构,例如,能够更准确地检测进行驾驶的搭乘者存在于车内的时刻,能够顺利地且在适当的时刻向搭乘在驾驶席的搭乘者交接行驶控制权限。
附图说明
9.图1是表示搭载有实施方式的驻车辅助装置的车辆的车厢的一部分被透视的状态的示例性且示意性的立体图。
10.图2是搭载有实施方式的驻车辅助装置的车辆的示例性且示意性的俯视图。
11.图3是表示包括实施方式的驻车辅助装置的车辆的控制系统的功能结构的示例性且示意性的框图。
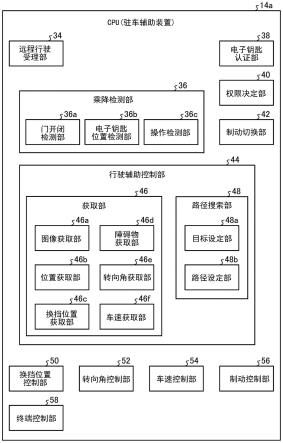
12.图4是表示实施方式的驻车辅助装置的结构的示例性且示意性的框图。
13.图5是表示实施方式的驻车辅助装置确认搭乘者下车而进行控制交接并执行驻车辅助控制的情况的处理流程的示例性的流程图。
14.图6是表示在实施方式的驻车辅助装置中执行驻车辅助控制时的制动控制的制动力的转换的示例性的图。
15.图7是表示在实施方式的驻车辅助装置中在检测搭乘者(驾驶员)下车的情况下利用的门传感器的输出值的转换的示例性的图。
16.图8是表示实施方式的驻车辅助装置确认搭乘者的乘车而进行控制的交接并执行出库辅助控制的情况的处理流程的示例性的流程图。
17.图9是表示在实施方式的驻车辅助装置中,在检测搭乘者(驾驶员)的乘车的情况下利用的电子钥匙的接收强度和驾驶操作部的输出值的转换的示例性的图。
18.附图标记说明
19.1:车辆、4:转向部、5:加速操作部、6:制动操作部、7:变速操作部、8:显示装置、10:操作输入部、11:显示器装置、13:转向系统、14:ecu、14a:cpu、15:拍摄部、16:雷达、17:声纳、18:制动系统、19:加速系统、20:变速系统、21:epb系统、26:门传感器、27:电子钥匙通信部、27a:电子钥匙、29:通信接口、29a:终端装置、34:远程行驶受理部、36:乘降检测部(检测部)、36a:门开闭检测部、36b:电子钥匙位置检测部、36c:操作检测部、38:电子钥匙认证部、40:权限决定部、42:制动切换部、44:行驶辅助控制部、46:获取部、46a:图像获取部、46b:位置获取部、46c:换挡位置获取部、46d:障碍物获取部、46e:转向角获取部、46f:车速获取部、48:路径搜索部、48a:目标设定部、48b:路径设定部、50:换挡位置控制部、52:转向角控制部、54:车速控制部、56:制动控制部、58:终端控制部、100:控制系统。
具体实施方式
20.以下,公开了本发明的示例性的实施方式。以下所示的实施方式的结构以及由该结构带来的作用、结果、以及效果是一例。本发明能够通过以下的实施方式中公开的结构以外来实现,并且能够得到基于基本的结构的各种效果、派生的效果中的至少一个。
21.图1是搭载有实施方式的驻车辅助装置的车辆1的车厢2a的一部分被透视的状态的示例性且示意性的立体图。在本实施方式的驻车辅助装置的情况下,驾驶员不进行驾驶
操作,而执行将车辆1自动地向设定的驻车区域(驻车空间)驻车的驻车辅助控制、以及从驻车状态自动地向规定的地点(驾驶员所在待车地点或其附近)出库的出库辅助控制。需要说明的是,本实施方式的驻车辅助装置也可以在搭乘了搭乘者(同乘者)的状态下执行驻车辅助控制或出库辅助控制,但基本上是,在搭乘者(驾驶员、同乘者)未搭乘在车辆1的状态下执行驻车辅助控制或出库辅助控制。因此,本实施方式的驻车辅助装置进行驾驶员的乘降的确认以及在车辆1的控制部与驾驶员之间进行随着驾驶员的乘降的车辆1的行驶控制权限的交接。
22.首先,对搭载有本实施方式的驻车辅助装置的车辆1的结构进行说明。
23.搭载本实施方式的驻车辅助装置的车辆可以是将内燃机(发动机)作为驱动源的汽车(内燃机汽车),也可以是将电动机(马达)作为驱动源的汽车(电动汽车、燃料电池汽车等),还可以是将这两者作为驱动源的汽车(混合动力汽车)。另外,车辆能够搭载各种变速装置、内燃机、电动机的驱动所需的各种装置(系统、部件等)。另外,与车辆中的车轮的驱动相关的装置的方式、个数、布局等能够进行各种设定。
24.如图1所示例那样,车辆1的车体2由未图示的乘员(搭乘者)所乘坐的车厢2a构成。在车厢2a内中,以面向作为乘员的驾驶员的座位2b的状态设置有转向部4、加速操作部5、制动操作部6、变速操作部7等。转向部4例如是从仪表盘24突出的方向盘。加速操作部5例如是位于驾驶员的脚下的加速踏板。制动操作部6例如是位于驾驶员的脚下的制动踏板。变速操作部7例如是从中央控制台突出的变速杆。
25.另外,在车厢2a内设置有显示装置8(显示部)、作为声音输出部的声音输出装置9。显示装置8例如是液晶显示器(lcd:liquid crystal display)、有机电致发光显示器(oeld:organic electro luminescent display)等。声音输出装置9例如是扬声器。另外,显示装置8例如被触摸面板等透明的操作输入部10覆盖。乘员(驾驶员、同乘者)能够经由操作输入部10视觉确认显示于显示装置8的显示画面的图像。另外,乘员在与显示于显示装置8的显示画面的图像对应的位置通过由手指等触碰或按压或移动来操作操作输入部10,从而能够执行操作输入。例如,在执行基于本实施方式的驻车辅助装置的驻车辅助控制的情况下,在驾驶员下车之前,在显示装置8显示用于执行远程驻车(驾驶员在下车后,通过自动驾驶使车辆1移动至驻车区域的模式)的图标等,使用操作输入部10能够使驾驶员输入用于执行远程驻车的意思确认。这些显示装置8、声音输出装置9、操作输入部10等例如设置在位于仪表盘24的车宽方向即左右方向的中央部的显示器装置11。显示器装置11可以具有开关、拨号器、操纵杆、按钮等未图示的操作输入部。另外,能够在车厢2a内的与显示器装置11不同的其他位置设置未图示的声音输出装置,能够从显示器装置11的声音输出装置9和其他声音输出装置输出声音。另外,也可以将用于执行远程驻车的开关与显示器装置11分开设置。需要说明的是,显示器装置11例如能够兼作导航系统或音频系统。
26.图2是搭载本实施方式的驻车辅助装置的车辆1的示例性且示意性的俯视图。如图1以及图2所示,车辆1是四轮汽车等,具有左右两个前轮3f和左右两个后轮3r。四个车轮3全部或者一部分能够转向。
27.在车体2中设置有例如四个拍摄部15a~15d,作为多个拍摄部15。拍摄部15例如是内置有ccd(charge coupled device,电荷耦合器件)或cis(cmos image sensor,互补金属氧化物半导体图像传感器)等拍摄元件的数码相机。拍摄部15能够以规定的帧速率输出动
画数据。拍摄部15每一个均具有广角透镜或鱼眼透镜,能够在水平方向上拍摄例如140
°
~220
°
的范围。另外,拍摄部15的光轴被设定为朝向斜下方。因此,拍摄部15对包括车辆1可移动的路面或车辆1可驻车的区域在内的车体2的周边的外部环境依次进行拍摄,并作为拍摄图像数据输出。
28.拍摄部15a例如设置于位于车体2的后侧的端部2e的、后备箱的门2h的下方的壁部,对车辆1的后方区域的状况进行拍摄。拍摄部15b例如设置于位于车体2的右侧的端部2f的、右侧的后视镜2g,对包括车辆1的右前方、右侧方、右后方在内的区域的状况进行拍摄。拍摄部15c例如设置于位于车体2的前侧即车辆前后方向的前方侧的端部2c的、前保险杠等,对车辆1的前方区域的状况拍摄。拍摄部15d例如设置于位于车体2的左侧即车宽方向的左侧的端部2d的、作为左侧的突出部的后视镜2g,对包括车辆1的左前方、左侧方、左后方在内的区域的状况进行拍摄。构成驻车辅助装置的ecu14(参照图3)基于由多个拍摄部15得到的拍摄图像数据来执行运算处理或图像处理,能够生成更宽视角的图像、或者生成从上方(正上方或斜上方)观察车辆1的虚拟的鸟瞰图像。
29.另外,车辆1具有多个雷达16,作为能够测量与存在于车辆1的外部的物体的距离的测距部。雷达16例如是毫米波雷达等,能够测量与存在于车辆1的行进方位(车辆1面向的方向)的物体的距离。在本实施方式中,车辆1具有多个雷达16a~16d。雷达16a例如设置于车辆1的后保险杠的左侧的端部,能够测量与存在于车辆1的左后方的物体的距离。另外,雷达16b设置于车辆1的后保险杠的右侧的端部,能够测量与存在于车辆1的右后方的物体的距离。雷达16c设置于车辆1的前保险杠的右侧的端部,能够测量与存在于车辆1的右前方的物体的距离。另外,雷达16d设置于车辆1的前保险杠的左侧的端部,能够测量与存在于车辆1的左前方的物体的距离。
30.另外,车辆1具有使用超声波能够测量与存在于距车辆1比较近距离的外部物体的距离的声纳17。在本实施方式中,车辆1具有多个声纳17a~17h。声纳17a~17d设置于车辆1的后保险杠,能够测量与存在于车辆的后方的物体的距离。声纳17e~17h设置于车辆1的前保险杠,能够测量与存在于车辆1的前方的物体的距离。
31.图3是表示包括本实施方式的驻车辅助装置在内的车辆1的控制系统100的功能结构的示例性且示意性的框图。如图3所示例那样,除了ecu14、显示器装置11、雷达16、声纳17等以外,控制系统100还与转向系统13、制动系统18、加速系统19、变速系统20、epb(electromechanical parking brake,机电驻车)系统21、转向角传感器22、轮速传感器23、门传感器26、电子钥匙通信部27、gps(global positioning system,全球定位系统)接收器28、以及通信接口(i/f)29等经由作为电通信线路的车内网络30电连接。车内网络30例如构成为can(controller area network,控制器局域网)。ecu14将控制信号通过车内网络30送出,从而能够控制转向系统13、制动系统18、加速系统19、变速系统20、epb系统21等。另外,ecu14能够经由车内网络30获取扭矩传感器13b、制动传感器18b、加速传感器19b、换挡传感器20b、epb传感器21b、转向角传感器22、轮速传感器23、雷达16、声纳17、门传感器26等的检测结果。另外,ecu14能够经由车内网络30接收电子钥匙通信部27、gps接收器28、通信接口29等的通信结果、操作输入部10等的开关类的操作信号等。
32.转向系统13是电动转向助力系统或sbw(steer by wire,线控转向)系统等。转向系统13具有致动器13a以及扭矩传感器13b。而且,转向系统13由ecu14等电控制,并且通过
使致动器13a动作对转向部4附加扭矩以补充转向力来转向车轮3。扭矩传感器13b检测由驾驶员施加到转向部4的扭矩,并将其检测结果向ecu14发送。
33.除了作为常规制动的制动力的控制以外,制动系统18还包括控制车辆1的制动的锁定的abs(anti-lock brake system,防抱死制动系统)、抑制转弯时的车辆1的侧滑的侧滑防止装置(esc:electronic stability control)、增强制动力以辅助制动的电动制动系统以及bbw(brake by wire,线控制动)。制动系统18具有致动器18a以及制动传感器18b。制动系统18由ecu14等电气控制,经由致动器18a对车轮3施加制动力。致动器18a例如是流体压力致动器,通过在加压时驱动盘式制动的挂架或鼓式制动的制动蹄片而产生制动力,从而使常规制动运作,进行行驶时的减速以及制动、停车时的静止保持。即,制动系统18作为为了保持停车状态(制动状态)而利用致动器18a的第一制动装置发挥功能。另外,制动系统18根据左右车轮3的旋转差,检测制动的锁定、车轮3的空转以及侧滑迹象等,执行控制以抑制制动的锁定、车轮3的空转以及侧滑。制动传感器18b是检测制动操作部6的作为可动部的制动踏板的位置的位移传感器,将制动踏板的位置的检测结果向ecu14发送。
34.加速系统19是作为驱动源的内燃机(发动机)系统或马达系统。加速传感器19b是检测加速操作部5的作为可动部的加速踏板的位置的位移传感器,并将该检测结果向ecu14发送。加速系统19根据由加速传感器19b检测到的驾驶员的请求操作量(例如加速踏板的踩踏量)来控制致动器19a,执行发动机的燃料喷射量或吸气量的控制、马达的输出值的控制,进行车辆1的速度的增减。
35.变速系统20根据由换挡传感器20b检测出的检测结果来驱动致动器20a,使齿轮的啮合状态发生变化,进行车辆1的变速比的控制以及前进、后退、驻车功能的切换。换挡传感器20b是检测变速操作部7的可动部(杆、臂、按钮等)的位置的传感器,并将该检测结果向ecu14发送。另外,变速系统20在ecu14的控制下,与变速操作部7的操作位置无关地,以得到适当的油耗的方式进行变速比等的控制。需要说明的是,变速系统20在换挡位置转移至驻车p的情况下,锁定构件(驻车锁定杆)被变速机(变速器)内的齿轮卡住,齿轮被固定,使得车辆1无法移动。即,作为保持停车时的停止状态的制动装置之一发挥功能。在该情况下,致动器20a作为仅在锁定构件与齿轮卡合时动作而在齿轮与锁定构件卡合后不利用致动器20a的第二制动装置发挥功能。
36.需要说明的是,ecu14与驾驶员的操作无关地协同控制转向系统13、制动系统18、加速系统19、变速系统20等,执行转向控制、制动控制、发动机及马达的输出控制、变速控制等,例如能够执行行驶辅助时或驻车辅助等行驶辅助。
37.代替现有的通过由杆或踏板的手动操作来拉拽线束从而由盘式制动或鼓式制动产生制动力的系统,epb系统21是使用致动器21a(例如马达)卷起线束而产生制动力的系统。ecu14例如接收配置于驾驶席的周围的epb开关的操作来控制致动器21a,卷起线束而产生制动力。另外,ecu14接收释放开关的操作或加速操作部5的操作,解开线束的卷起以解除制动力。致动器21a作为仅在线束的卷起时动作而在产生了制动力的卷起后不利用致动器21a的第二制动装置发挥功能。
38.转向角传感器22是检测方向盘等转向部4的转向量(转向角)的传感器。转向角传感器22由霍尔元件等构成,将转向部4的旋转部分的旋转角度作为转向量检测出,并将该检测结果向ecu14发送。ecu14(cpu14a)也可以基于获取到的转向角来计算轮胎角。在该情况
下,例如,也可以使用按照每种车预先准备的转向角和轮胎角的转换映射来计算,也可以基于规定的运算式来计算。需要说明的是,在另一个实施方式中,也可以在转向机构中设置轮胎角传感器,直接地获取轮胎角。转向角或轮胎角能够在进行车辆1的驻车辅助、出库辅助时利用于车辆1的移动路径的搜索、实际上自动地驾驶车辆1的情况等。
39.轮速传感器23是检测设置于各车轮3的各车轮3的旋转量、每单位时间的旋转数的传感器,并输出表示检测出的旋转数的轮速脉冲数作为检测值。轮速传感器23例如能够使用霍尔元件等构成。ecu14基于从轮速传感器23获取到的检测值,来运算车辆1的车速或移动量等,并执行各种控制。ecu14在基于各车轮3的轮速传感器23的检测值来计算车辆1的车速的情况下,例如基于四轮中的最小的检测值的车轮3的速度来决定车辆1的车速,并执行各种控制。另外,在四轮中存在检测值比其他的车轮3大的车轮3的情况下,例如在存在与其他车轮3相比单位期间(单位时间或单位距离)的旋转数为规定数以上的较多旋转数的车轮3的情况下,ecu14将该车轮3视为处于打滑状态(空转状态),并且执行各种控制。轮速传感器23也有设置于制动系统18的情况。在该情况下,ecu14经由制动系统18获取轮速传感器23的检测结果。
40.在存在图2所示的车辆1的乘降用的各门32(32a~32d)以及门2h(后备箱的门)、后尾门的车辆的情况下,门传感器26是分别设置于该后尾门并针对每个门32等检测有无开闭的传感器,并将该检测结果向ecu14发送。门传感器26可以是接触型的机械式开关,也可以是非接触型的光电传感器、静电容量传感器等。在ecu14中,门传感器26也可以在继门32的打开动作后检测到关闭动作的情况下,判定为进行了乘员(搭乘者)的乘降。需要说明的是,在如图1所示的车辆1那样不进行乘员的乘降的后备箱的门2h的情况下,配置于门2h的门传感器26用于后备箱的开闭判定而不用于乘降判定。另一方面,根据车型不同,存在能够从后尾门进行乘降的车辆。在该情况下,也可以基于后尾门的开关动作,判定为进行了乘员(搭乘者)的乘降。
41.电子钥匙通信部27始终向车辆1的周围(例如几米的规定范围)发出微弱的电波,进行作为检测对象的电子钥匙27a的检测(搜索)。在电子钥匙27a在规定范围内被检测到的情况下,接收从电子钥匙27a发送的认证信息(认证用id),并向ecu14发送。ecu14进行从电子钥匙发送的认证信息与预先设定于车辆1侧的基准认证信息的校验,在认证被肯定的情况下,允许车辆1的门32的上锁或解锁的控制、点火开关操作的受理等。ecu14基于电子钥匙通信部27正在发送的微弱电波的范围内的电子钥匙27a的检测位置,能够进行电子钥匙27a存在于车辆1的车厢2a内还是存在于车厢2a外(车外)的判定,能够执行基于电子钥匙27a位置的车辆1的控制。
42.gps接收器28基于从人工卫星接收到的电波来获取车辆1的当前位置。例如,在行驶辅助控制、驻车辅助控制、出库辅助控制时,能够基于车辆1的当前位置,并基于移动路径的获取、移动路径与车辆1的当前位置来执行引导控制。需要说明的是,在车辆1搭载有导航系统的情况下,也可以从导航系统获取gps信息(车辆1的当前位置的信息)。在该情况下,也可以省略gps接收器28。
43.通信接口29是实现车辆1的控制系统100(驻车辅助装置)与外部装置之间的通信的接口。例如,通信接口29实现在ecu14与乘员(搭乘者)所携带的终端装置29a之间基于无线通信的信号的发送接收。需要说明的是,终端装置29a例如可以是用于执行本实施方式的
驻车辅助、出库辅助的专用的终端装置,也可以是与驱动车辆1的电子钥匙27a一体化的终端装置。另外,也可以是安装有专用的应用程序的平板电脑或智能手机等移动终端。
44.需要说明的是,上述的各种系统或传感器、致动器等的结构、配置、电连接方式等只是一例,能够进行各种地设定(变更)。
45.ecu14由计算机等构成,通过硬件和软件协作来管理车辆1的控制整体。具体而言,ecu14具有cpu(central processing unit,中央处理器)14a、rom(read only memory,只读存储器)14b、ram(random access memory,随机存取存储器)14c、显示控制部14d、声音控制部14e、以及ssd(solid state drive,固态硬盘)14f。cpu14a、rom14b、以及ram14c也可以设置于相同的电路基板内。
46.cpu14a能够读出安装并存储于rom14b等非易失性的存储装置的程序,并根据该程序来执行运算处理。cpu14a例如能够执行与驻车辅助控制、出库辅助控制等相关的运算以及控制。另外,cpu14a通过对由拍摄部15得到的广角图像的拍摄图像数据(弯曲的图像的数据)实施运算处理、图像处理,从而能够执行校正失真的失真校正处理,或者基于由拍摄部15拍摄到的拍摄图像数据生成将表示车辆1的车辆图像(本车图标)显示在例如中心位置的鸟瞰图像(周边图像),进而显示于显示装置8。另外,cpu14a在生成鸟瞰图像时,能够变更虚拟视点的位置,生成从正上方面向车辆图像那样的鸟瞰图像、从斜方向面向车辆图像那样的鸟瞰图像。
47.cpu14a例如在进行驻车辅助、出库辅助等行驶辅助的情况下,也可以生成搭乘者(驾驶员)从车外容易识别驻车辅助的状况、驻车辅助时的车辆1的周围状况的图像,然后经由通信接口29向驾驶员所携带的终端装置29a发送并进行确认。需要说明的是,在搭乘者存在于车内的情况也可以执行驻车辅助、出库辅助等行驶辅助。在该情况下,表示驻车辅助等状况的图像也可以显示于显示装置8。
48.rom14b存储各种程序以及该程序的执行所需的参数等。ram14c临时地存储cpu14a中的运算所使用的各种数据。显示控制部14d在ecu14中的运算处理中,主要执行对从拍摄部15获取并向cpu14a输出的图像数据的图像处理、将从cpu14a获取到的图像数据向显示装置8显示的显示用的图像数据的转换等。声音控制部14e在ecu14中的运算处理中,主要执行从cpu14a获取并向声音输出装置9输出的声音的处理。ssd14f是可改写的非易失性的存储部,即使在ecu14的电源断开的情况下,也继续存储从cpu14a获取到的数据。需要说明的是,cpu14a、rom14b、ram14c等能够集成在同一封装内。另外,ecu14也可以是代替cpu14a而使用dsp(digital signal processor,数字信号处理器)等其他的逻辑运算处理器或逻辑电路等的结构。另外,也可以代替ssd14f而设置hdd(hard disk drive,硬盘驱动器),ssd14f或hdd也可以与ecu14分开地设置。
49.图4是示例性且示意性地表示由cpu14a实现实施方式的驻车辅助装置的情况的结构的框图。通过cpu14a执行从rom14b读出的驻车辅助处理程序,如图4所示,从而实现远程行驶受理部34、乘降检测部36、电子钥匙认证部38、权限决定部40、制动切换部42、行驶辅助控制部44等模块。
50.在本实施方式的驻车辅助装置的情况下,如上所述,能够在驾驶员不进行驾驶操作的状态下,执行将车辆1自动地驻车到设定有驻车区域的驻车辅助控制(远程行驶控制)。在该情况下,驾驶员在从车辆1下车之前,例如通过操作输入部10的操作来输出使基于自动
控制的驻车辅助控制转移至能够执行的状态的操作信号。远程行驶受理部34在受理了从操作输入部10提供的操作信号的情况下,使驻车辅助装置(cpu14a)向能够进行驻车辅助控制的状态转移。另外,远程行驶受理部34受理了经由通信接口29从终端装置29a输入的远程行驶(基于驻车辅助控制的行驶、基于出库辅助控制的行驶)的请求。
51.在本实施方式的驻车辅助装置的情况下,如上所述,也可以在搭乘者(驾驶员)搭乘于车辆1的状态下执行驻车辅助、出库辅助,但基本上是在搭乘者(驾驶员)未搭乘于车辆1的状态下执行驻车辅助、出库辅助。因此,需要检测车辆1中的搭乘者(驾驶员)的有无以及搭乘者(驾驶员)的位置。因此,乘降检测部36包括门开闭检测部36a、电子钥匙位置检测部36b、操作检测部36c等详细模块。
52.门开闭检测部36a获取门传感器26输出的开闭信号。门传感器26例如在门32全关的情况下输出on信号,在门32打开规定角度以上的情况下为off。因此,通过参照门传感器26的输出值(信号值)的转换,能够检测门32的开关动作。例如,在门32从关闭状态向打开状态转移的情况下,车体2的开口部被暂时放开,之后,在向关闭状态转移的情况下,能够推定为打开的门32被关闭。即,能够作为推定搭乘者是否已乘降的一种方法来利用。需要说明的是,如前所述,在能够从后尾门乘降的类型的车辆的情况下,门开闭检测部36a也可以获取来自设置于后尾门的门传感器26的开闭信号。在该情况下,也可以基于后尾门的开关动作来推定乘员是否已乘降。
53.电子钥匙位置检测部36b检测能够进行车辆1的行驶控制的电子钥匙27a的位置。如前所述,电子钥匙27a作为能够使车辆1的发动机或电子设备等起动的点火钥匙发挥功能。电子钥匙位置检测部36b基于电子钥匙通信部27正在发送的微弱电波的发送范围内的电子钥匙27a的位置,进行电子钥匙27a存在于车辆1的车厢2a内还是存在于车厢2a外的判定。即,在来自电子钥匙27a的信号的强度为规定的阈值以上的情况下,能够推定为电子钥匙27a存在于车厢2a内,能够视为车辆1的搭乘者(驾驶员)乘坐于车辆1。另一方面,在来自电子钥匙27a的信号的强度小于规定的阈值的情况下,能够推定为电子钥匙27a存在于车厢2a外,能够视为车辆1的搭乘者(驾驶员)已从车辆1下车。即,能够作为推定搭乘者是否已乘降的又一个方法来利用。需要说明的是,由于存在多个电子钥匙27a的情况,因此期望将电子钥匙27a存在的位置信息与其他信息组合来进行搭乘者的乘降判定。
54.在搭乘者落座在座位2b(驾驶席)的情况下,操作检测部36c检测是否操作了可操作的驾驶操作部。驾驶操作部例如是转向部4(方向盘)、加速操作部5(加速踏板)、制动操作部6(制动踏板)、变速操作部7(变速杆)等,也可以在实际被操作的情况下输出操作检测信号,也可以通过触碰驾驶操作部(成为可操作状态)来输出操作检测信号。需要说明的是,驾驶操作部不限于上述的例子,也可以在触碰了或操作了显示器装置11或空调装置的情况下,输出操作检测信号。另外,也可以在由重量传感器或压力传感器等检测到落座在座位2b的情况下输出操作检测信号。
55.需要说明的是,乘降检测部36具有如下优点:由门开闭检测部36a仅通过将门32从关闭状态先成为打开状态再成为关闭状态的情况判定为搭乘者已下车的情况,从而在存在多个电子钥匙27a和终端装置29a的情况下容易避免判定变得模糊。另外,在另一个实施方式中,虽然是存在电子钥匙27a和终端装置29a各一个的情况,但参照由电子钥匙位置检测部36b检测到的电子钥匙27a的当前位置,在电子钥匙27a存在于车外的情况下,判定为搭乘
者(驾驶员)已下车,从而能够提高判定精度。
56.另一方面,乘降检测部36也可以通过由电子钥匙位置检测部36b检测到搭乘者存在于车厢2a内的事实,并且由操作检测部36c检测到驾驶操作部被操作的事实,从而判定为搭乘者已乘车。通过考虑在乘车时基于电子钥匙位置检测部36b的检测结果,能够明确地辨别乘车和下车。需要说明的是,在判定为驾驶员已乘车的情况下,也可以将驾驶席的门32从关闭状态变为打开状态再成为关闭状态作为条件。在该情况下,能够进行更可靠的乘车判定。
57.电子钥匙认证部38将电子钥匙通信部27获取到电子钥匙27a的认证信息与预先设定的车辆1的基准认证信息进行比较,在相互的认证信息一致而认证成立的情况下,向车辆1的各控制部提供认证肯定信息,能够控制各控制部。例如,能够控制以控制门32的上锁解锁的门系统、点火系统等为代表的、进行车辆1的电气系统的控制的各控制系统。因此,在基于电子钥匙认证部38的认证不成立的情况下,车辆1的各控制系统保持现状。
58.权限决定部40基于乘降检测部36的检测结果,决定使车辆1的行驶控制权限归属于行驶辅助控制部44还是归属于搭乘者(驾驶员)。
59.例如,在行驶控制权限归属于驾驶员的状态下,在乘降检测部36中,在作为乘降行为通过门开闭检测部36a在继驾驶席的门32的打开动作后检测到关闭动作的情况下,权限决定部40判定为搭乘者(驾驶员)已下车。然后,权限决定部40决定使行驶控制权限从搭乘者(驾驶员)转移至行驶辅助控制部44。即,使车辆1不经由驾驶员的情况下转移到能够自动驾驶的状态。需要说明的是,在本实施方式中,搭乘者(驾驶员)的下车后的自动驾驶是使车辆1移动至规定的驻车区域来完成驻车的驻车辅助驾驶。在进行驻车辅助驾驶的情况下,基本上车厢2a的搭乘者全部下车。例如,在驾驶员下车后,在操作终端装置29a等来执行驻车辅助控制的情况下,也可以通过显示或声音将确认在车厢2a中不存在搭乘者的消息输出到终端装置29a,并唤起注意。另外,权限决定部40也可以通过显示或声音向终端装置29a输出表示行驶控制权限转移到行驶辅助控制部44的信息。
60.另外,在检测到能够起动出库辅助控制的终端装置29a存在于车厢2a内,并且,在作为针对车辆1的乘降行为检测到驾驶席的驾驶操作部的操作的情况下,权限决定部40判定为搭乘者(驾驶员)在出库后乘车。然后,权限决定部40决定使行驶控制权限从行驶辅助控制部44向搭乘者(驾驶员)转移。即,使车辆1转移至能够由驾驶员进行手动驾驶而无需行驶辅助控制部44干预的状态。在该情况下,终端装置29a是否存在于车厢2a内,能够通过电子钥匙27a存在的位置来推定。例如,通过电子钥匙位置检测部36b检测到电子钥匙27a存在于车厢2a内的情况下,能够视为驾驶员所携带的终端装置29a也存在于车厢2a内。需要说明的是,在终端装置29a与电子钥匙27a一体化的情况下,也可以将电子钥匙位置检测部36b的检测结果作为判定为搭乘者(驾驶员)在出库后已乘车的信息来利用。
61.制动切换部42控制制动系统18、变速系统20、epb系统21等,切换对车辆1的制动力的施加状态。在本实施方式中,在执行驻车辅助控制的情况下,作为车辆1的行驶驱动源的发动机或马达保持驱动状态地停车,驾驶员下车。因此,期望在驾驶员从车辆1下车时以及在下车后,至少到按照移动路径开始移动为止,产生控制力。另一方面,在车辆1的停车时仍驱动致动器等的状态下能量效率降低。
62.因此,在本实施方式的驻车辅助装置的情况下,驾驶员为了执行驻车辅助控制,从
通过制动操作部6的踩踏而产生制动力(基于常规制动的制动力)以使车辆1停止的状态到远程行驶受理部34受理了远程行驶的请求信号的情况下,首先,控制制动系统18的致动器18a自动地产生基于常规制动的制动力。另外,控制变速系统20的致动器20a,产生基于齿轮与锁定构件的卡合的制动力。进而,控制epb系统21的致动器21a,产生基于epb的制动力。如前所述,基于变速系统20的制动力仅在进行使齿轮与锁定构件卡合的动作的情况下使致动器20a驱动,即使卡合后(产生制动力后)中止电流的供给也能够保持制动力。同样地,epb仅在线束的卷起时驱动致动器21a,即使卷起后(制动力产生后)中止电流的供给也能够保持制动力。另一方面,盘式制动或鼓式制动等的常规制动中,为了保持制动力的产生,必须向致动器18a持续供给电流。
63.因此,制动切换部42在能够确认到充分确保了制动力的情况下,以中止使用在制动力的产生中需要电力的制动系统18(常规制动系统:第一制动装置)的方式进行制动控制的切换。在该情况下,若将致动器18a设为瞬时非驱动,则有时会产生由制动力的释放而引起的冲击(振动、异响等)的情况。因此,制动切换部42也可以对制动系统18以逐渐进行制动力的解除的方式进行渐进式控制。通过将作为第一制动装置的制动系统18设为非使用,从而驾驶员能够解除制动操作部6的踩踏而从车辆1下车并离开,能够可靠地保证直至基于驻车辅助控制的行驶开始为止的期间的车辆1的停止(停车)。另外,此时,能够有助于减轻(消除)对致动器18a(制动系统18)的负荷,有助于节能化。
64.接着,对行驶辅助控制部44的结构进行说明。
65.行驶辅助控制部44作为用于执行驻车辅助控制以及出库辅助控制的模块,包括获取部46、路径搜索部48、换挡位置控制部50、转向角控制部52、车速控制部54、制动控制部56、终端控制部58等。需要说明的是,获取部46包括图像获取部46a、位置获取部46b、换挡位置获取部46c、障碍物获取部46d、转向角获取部46e、车速获取部46f等详细模块。另外,路径搜索部48包括目标设定部48a、路径设定部48b。
66.获取部46进行驻车辅助控制以及出库辅助控制所需的各种信息的获取。
67.图像获取部46a获取车辆1的行驶中以及停车中由拍摄部15拍摄到的车辆1的周边图像。获取到的图像信息能够利用于车辆1的能够驻车的驻车区域候补的搜索、从车辆1的周围以及驻车区域候补选择出的向目标驻车区域的移动中存在与车辆1接触的可能性的物体的检测、用于向目标驻车区域移动的移动路径的搜索等中。
68.位置获取部46b基于从gps接收器28获取的gps信号进行车辆1的当前位置(绝对坐标)的获取,用于移动路径的搜索、移动状态的确认等。需要说明的是,除了基于gps信号的位置获取以外,位置获取部46b例如还基于由图像获取部46a获取到的图像信息、距由该图像信息确定出的基准位置的移动距离和移动方向等,来推定车辆1相对于基准位置的当前位置(相对位置)。即,一旦确定了基准位置并确定了目标驻车区域,即使在无法接收gps信号的情况也能够推定在该两点之间的车辆1的位置。
69.换挡位置获取部46c基于来自变速系统20的换挡传感器20b的信号来获取当前的车辆1的换挡位置。基于换挡位置,行驶辅助控制部44能够进行当前的车辆1能够前进还是能够后退的状态或者驻车状态(制动状态)的判定。
70.障碍物获取部46d使用基于由拍摄部15获取到的图像信息以及由雷达16、声纳17获取到的反射波信息的周知技术,获取存在于车辆1的周围的物体、特别是车辆1行驶时存
在接触的可能性的障碍物的位置。需要说明的是,障碍物获取部46d也可以作为通过模式识别等检测出的物体的类别,例如,也可以进行其他车辆、自行车、行人、墙壁或柱子等静止物等的识别。
71.转向角获取部46e基于从转向角传感器22获取到的旋转角,获取车辆1的当前的转向角。获取到的转向角能够在决定驻车辅助控制、出库辅助控制时的车辆1的行驶方向时利用。
72.车速获取部46f基于轮速传感器23获取到的检测值,来推定车辆1的车速。车辆1的车速在驻车辅助控制、出库辅助控制时,反映在转向系统13、制动系统18、加速系统19、变速系统20等的控制,为了实现最佳的移动而能够利用。
73.路径搜索部48基于由获取部46获取到的各种信息,进行在执行驻车支线控制、出库辅助控制时的移动路径的搜索。移动路径的搜索能够利用周知技术。
74.目标设定部48a基于由拍摄部15拍摄到的图像信息,检测并设定车辆1能够驻车的区域。目标设定部48a基于车辆1的车宽和车长、旋回半径等因素,来检索并设定车辆1能够进入的驻车区域候补。目标设定部48a可以根据在车辆1想要进行驻车而行驶时由拍摄部15拍摄到的图像信息来检测驻车区域候补,也可以利用表示经由通信接口29获取到的停车场的利用状况的地图等来检测驻车区域候补。作为驻车区域候补,目标设定部48a可以输出单一的推荐驻车区域来设定,也可以向驾驶员提供多个驻车区域候补而通过选择所希望的驻车区域来设定。需要说明的是,在出库辅助控制的情况下,目标设定部48a将驾驶员等所指定的出库位置、或者预先设定的出库位置设定为出库目标位置。
75.路径设定部48b对执行从车辆1的当前位置向由目标设定部48a设定的驻车区域移动的驻车辅助控制时的移动路径进行设定。出库辅助控制的情况也同样地,对从车辆1的当前位置(驻车中的驻车区域)向由目标设定部48a设定的出库目标位置移动的移动路径进行设定。需要说明的是,路径设定部48b可以将单一的路径候补作为设定路径来提示,也可以提示多个路径候补供驾驶员选择来进行设定。
76.换挡位置控制部50基于由换挡位置获取部46c获取到的当前的车辆1的换挡位置,基于目标设定部48a所设定的驻车目标位置或者出库目标位置以及路径设定部48b所设定的移动路径等,对变速系统20的致动器20a进行控制,以成为最适合于移动辅助的换挡位置(前进时的换挡位置或者后退时的换挡位置)的方式进行控制。
77.同样地,转向角控制部52以车辆1能够按照路径设定部48b所设定的移动路径移动的方式来控制转向系统13的致动器13a。另外,车速控制部54也以车辆1处于能够按照路径设定部48b所设定的移动路径安全地移动的车速的方式来控制加速系统19的致动器19a。
78.另外,制动控制部56也以车辆1处于能够按照路径设定部48b所设定的移动路径安全地移动的车速的方式来控制制动系统18的致动器18a。需要说明的是,制动控制部56根据车辆1的状态进行epb系统21的控制以及变速系统20在驻车位置作为制动装置发挥功能的情况下的制动控制。
79.终端控制部58根据车辆1的当前的控制状态经由通信接口29向终端装置29a提供给搭乘者(驾驶员)信息,例如车辆1的周围的安全确认、乘车指示等的引导显示或声音指示。
80.利用图5~图7对如以上那样构成的驻车辅助装置中的驻车辅助控制的流程进行
说明。
81.图5是表示驻车辅助装置确认搭乘者(驾驶员)下车而进行控制交接并执行驻车辅助控制的情况下的处理流程的示例性的流程图。需要说明的是,在驾驶员下车后执行驻车辅助控制的情况下发动机处于怠速状态。
82.首先,驻车辅助装置(cpu14a)基于来自车速获取部46f的轮速的信息,确认车辆1是否处于停车中(s100)。在车辆1不处于停车中的情况下(s100为“否”),即行驶中的情况下,则暂时结束该流程。在车辆1处于停车中的情况下(s100为“是”),即,驾驶员踩踏制动操作部6(制动踏板)而成为产生基于制动系统18(常规制动)的制动力的状态。在该情况下,确认远程行驶受理部34是否受理了表示通过操作设置于车厢2a内的操作输入部10等开关而选择远程驻车的信息的信号(s102)。在驾驶员未选择远程驻车的情况下(s102为“否”),暂时停止该流程。
83.另一方面,在驾驶员选择了远程驻车的情况下(s102为“是”:时刻t),制动控制部56在执行远程驻车(驻车辅助控制)之前,除了基于常规制动的制动力以外,还产生基于辅助的制动装置(辅助制动)的制动力(s104)。即,如图6所示,除了常规制动以外,控制变速系统20而产生制动力。如前所述,在变速系统20中通过使换挡位置从驻车(p)的位置以外(a:any)向驻车(挡位p)转移,变速机内的齿轮被锁定而产生制动力。另外,制动控制部56控制epb系统21而产生基于epb的制动力(信号0
→
信号1)。需要说明的是,在选择了远程驻车的情况下(时刻t),无论驾驶员有无操作制动操作部6,制动控制部56都控制制动系统18的致动器18a以保持产生基于常规制动的制动力(保持信号1)。
84.接着,制动切换部42确认是否已完成基于变速系统20的齿轮与锁定构件的卡合的制动力(挡位p)以及基于epb系统21的epb制动的制动力的产生(s106)。例如,在通过基于来自换挡传感器20b以及epb传感器21b的信号进行的判定,无法确认到已完成基于辅助制动(挡位p、epb)的制动力的产生的情况下(s106为“否”)进入到s104,继续基于辅助制动的制动力的产生控制处理。另一方面,在能够确认已完成基于辅助制动(挡位p、epb)的制动力的产生的情况下(s106为“是”),制动切换部42逐渐解除基于制动系统18的制动力的产生(s108)。如前所述,制动系统18是用于保持停车状态(制动状态)而利用致动器18a的第一制动装置。即,在产生制动力期间,致动器18a是驱动状态。另一方面,变速系统20是仅在齿轮与锁定构件卡合时使致动器20a处于驱动状态,而在产生了基于齿轮与锁定构件的卡合的制动力的卡合后则不利用致动器20a的第二制动装置。同样地,epb系统21是仅在线束的卷起时使致动器21a处于驱动状态,而在产生了制动力的卷起后则不利用致动器21a的第二制动装置。因此,在确保了基于辅助制动(挡位p、epb)的制动力之后,通过解除常规制动,能够在搭乘员(驾驶员)下车时以及其前后确保充分的制动力的基础上,不使用致动器18a,有助于节能化。
85.接着,进行由目标设定部48a进行的驻车目标位置的设定处理(s110)。需要说明的是,在由目标设定部48a进行驻车目标位置的设定的情况下,期望目标设定部48a在显示装置8等显示驻车目标位置(候补),接受驾驶员的承认,并进行确定(s112)。在未确定驻车目标位置的情况下(s112为“否”),继续s110的驻车目标位置设定处理。例如,进行其他的驻车目标位置的候补的提示。另一方面,在确定了驻车目标位置的情况下(s112为“是”),显示控制部14d使用显示装置8对驾驶员进行下车指示显示(s114)。需要说明的是,除了使用了显
示装置8的下车指示显示以外,或者代替显示,也可以进行使用了声音输出装置9的声音引导。在该情况下,由于是确保了基于辅助制动(挡位p、epb)的制动力的状态,因此车辆1不出动,搭乘者(驾驶员等)能够安全地下车。
86.在进行了下车指示显示之后,如图7所示,由门开闭检测部36a检测到关闭状态的驾驶席的门32转移到打开状态再转移到关闭状态的情况下(s116为“是”:信号0
→
信号1),推定为驾驶员已下车,乘降检测部36将下车标志设为on(s118)。在下车标志为on的情况下,权限决定部40判定为能够执行驻车辅助控制的要件已成立,使控制权限从搭乘者(驾驶员)转移到行驶辅助控制部44(s120)。需要说明的是,在s116中,继驾驶席的门32的打开动作后无法确认关闭动作的情况下(s116为“否”),返回至s114,继续下车指示显示。
87.在s120中,在控制权限转移至行驶辅助控制部44的情况下,权限决定部40在搭乘者(驾驶员)所携带的终端装置29a等显示驻车辅助的专用应用程序(驻车辅助程序)的起动指示(s122)。远程行驶受理部34在从终端装置29a获取了驻车辅助的专用应用程序的操作例如驻车辅助开始的操作的情况下(s124为“是”),行驶辅助控制部44如前所述那样进行驻车目标位置以及移动路径的设定,通过换挡位置控制部50、转向角控制部52、车速控制部54、制动控制部56等的协作来执行驻车辅助处理(s126)。需要说明的是,在s124中,在无法确认专用应用程序的操作的情况下(s124为“否”),返回至s122,继续显示驻车辅助的专用应用程序的起动指示、指示输入请求等。
88.在执行驻车辅助处理后,行驶辅助控制部44通过位置获取部46b确认车辆1的当前位置是否到达设定的驻车目标位置(s128)。在车辆1的当前位置到达了驻车目标位置的情况下(s128为“是”),行驶辅助控制部44执行驻车辅助结束处理(s130)。例如,制动控制部56经由换挡位置控制部50来控制变速系统20,将换挡位置转移至驻车位置(挡位p),产生基于齿轮固定的制动力。另外,制动控制部56控制epb系统21,产生基于epb制动的制动力。然后,权限决定部40对终端装置29a等进行表示驻车辅助结束的结束显示、结束通知,并且将车辆1的点火开关设为断开(off)而使车辆1处于休止状态,结束该流程(s132)。需要说明的是,在s128中,在车辆1还未到达驻车目标位置的情况下(s128为“否”),返回至s126,继续进行驻车辅助处理。即,基于移动路径继续进行车辆1的移动。另外,在车辆1的移动中在移动路径上发现了新的障碍物等的情况下,进行移动路径的再搜索,继续驻车辅助控制。另外,在另一个实施方式中,在障碍物存在于无法回避的位置的情况下,行驶辅助控制部44也可以判定为驻车辅助控制的继续不适当,经由终端装置29a向驾驶员通知驻车辅助控制的中止,请求驾驶员的应对。
89.这样,根据本实施方式的驻车辅助装置,例如,能够更准确地检测进行驾驶的搭乘者(驾驶员)处于存在于车外的时机,能够顺利地且在适当的时刻使行驶控制权限向行驶辅助控制部44交接。
90.接着,参照图8、图9对驻车辅助装置中的出库辅助控制的流程进行说明。
91.图8是表示驻车辅助装置确认搭乘者的乘车而进行控制的交接并执行出库辅助控制的情况的处理流程的示例性的流程图。需要说明的是,在执行出库辅助控制的情况下,在发动机已停止的状态下,出库目标位置被预先设定在规定的位置,例如停车场的乘员待车位置、驻车区域附近的路肩等。
92.首先,驻车辅助装置(cpu14a)确认在搭乘者(驾驶员)所携带的终端装置29a等中
出库辅助的专用应用程序是否正在起动(s200)。在专用应用程序未起动的情况下(s200为“否”),暂时结束该流程。另一方面,在出库辅助的专用应用程序起动完毕的情况下(s200为“是”),电子钥匙认证部38进行起动车辆1的电子钥匙27a的认证(s202)。在电子钥匙认证部38中,在电子钥匙27a的认证被否定的情况下(s202为“否”),暂时结束该流程。在电子钥匙27a的认证被肯定的情况下(s202为“是”),电子钥匙认证部38将点火开关设为接通(on)(s204)。在点火开关被接通之后,cpu14a对终端装置29a等进行辅助内容的显示(s206)。作为辅助内容,例如除了出库辅助以外,还有发动机的起动(例如指示热车驾驶)、基于空调装置的起动的车厢2a内的温度调整和换气等。二者均能够作为用于舒适地使用驻车中的车辆1的辅助。然后,在选择了出库辅助的情况下(s208为“是”),确认出库目标位置的设定完毕(s210)。在出库目标位置设定完毕的情况下(s210为“是”),驾驶员操作终端装置29a而输入辅助开始指示,在远程行驶受理部34受理了辅助开始指示的情况下(s212为“是”),行驶辅助控制部44经由车速控制部54而起动加速系统19。即,起动发动机(s214)。需要说明的是,在s212中,在远程行驶受理部34未受理辅助开始指示的情况下(s212为“否”),转移至s210,确认出库目标位置设定是否完毕,并重复以后的处理。另外,在s210中,在未设定出库目标位置的情况下(s210为“否”),等待直至设定的完成。在未设定出库目标位置的情况下,行驶辅助控制部44也可以例如使终端装置29a显示提示出库目标位置的指定信息。另外,在s208中,在未选择出库辅助的情况下(s208为“否”),继续显示辅助内容,等待选择辅助内容。
93.在启动发动机之后,远程行驶受理部34进行是否受理了出库辅助控制的继续指示的确认(s216)。此时,cpu14a例如向终端装置29a进行引导以提示进行周围的安全确认。驾驶员对周围的安全确认完成,在受理了希望继续出库辅助控制的继续指示(请求信号)的情况下(s216为“是”),行驶辅助控制部44开始出库辅助控制(s218)。即,如前所述,进行出库目标位置以及移动路径的设定,通过换挡位置控制部50、转向角控制部52、车速控制部54、制动控制部56的协作来执行出库辅助处理。
94.在执行出库辅助处理之后,通过位置获取部46b确认车辆1的当前位置是否到达了所设定的出库目标位置(s220),在能够确认车辆1的当前位置已到达出库目标位置的情况下(s220为“是”),行驶辅助控制部44执行车辆停止处理(s222)。例如,制动控制部56经由换挡位置控制部50来控制变速系统20,将换挡位置转移至驻车位置(挡位p),产生基于齿轮固定的制动力。另外,制动控制部56控制epb系统21,产生基于epb制动的制动力。另外,制动控制部56也可以控制制动系统18,一并产生基于常规制动的制动力。
95.在基于换挡传感器20b、epb传感器21b等的输出,能够确认对车辆1施加了充分的制动力的情况下,终端控制部58经由通信接口29对终端装置29a进行乘车指示(s224)。在乘车指示后,如图9的上段所示,电子钥匙位置检测部36b基于电子钥匙27a的接收强度为规定阈值以上的“h”还是小于阈值的“l”,来确认电子钥匙27a的存在位置是否在车厢2a内(s226)。电子钥匙27a的接收强度为“h”,即27a的存在位置为车厢2a的情况下(s226为“是”),如图9的下段所示,操作检测部36c进行是否有驾驶操作部的操作的确认(s228)。在电子钥匙27a存在于车厢2a内,并且能够确认到驾驶操作部的操作(信号0
→
信号1)的情况下(s228为“是”),权限决定部40判定为能够执行基于驾驶员的手动驾驶的要件已成立,从行驶辅助控制部44向搭乘者(驾驶员)转移控制权限(s230)。然后,远程行驶受理部34经由显示控制部14d,将表示出库辅助控制已结束的结束显示(信息)经由显示装置8向乘坐在车
辆1并存在于车厢2a内的驾驶员(s232)通知。需要说明的是,也可以除使用显示装置8对出库辅助控制的结束的意思进行显示以外,进行使用了声音输出装置9的声音引导来代替显示。
96.在s228中,在无法确认驾驶操作部的操作的情况下(s228为“否”),或者在s226中,在电子钥匙27a的存在位置不是车厢2a的情况下(s226为“否”),转移至s224,继续乘车指示显示。另外,在s220中,在未到达出库目标位置的情况下(s220为“否”),返回至s218,继续进行出库辅助处理。即,基于移动路径继续车进行辆1的移动。在出库时车辆1的移动中在移动路径上发现新的障碍物等的情况下,也可以进行移动路径的再搜索,继续出库辅助控制。另外,在另一个实施方式中,在存在无法避免障碍物的位置的情况下,行驶辅助控制部44判定为出库辅助控制的继续不适当,也可以经由终端装置29a向驾驶员通知出库辅助控制的中止,请求驾驶员的应对。
97.如此,根据本实施方式的驻车辅助装置,例如,能够更准确地检测进行驾驶的搭乘者(驾驶员)存在于车内的时刻,能够顺利地且在适当的时刻使行驶控制权限向搭乘驾驶席的驾驶员交接。
98.需要说明的是,用于由实现本实施方式的驻车辅助装置的cpu14a执行的驻车辅助(出库辅助)处理的程序也可以是以可安装的格式或者可执行的格式的文件记录在cd-rom、软盘(fd)、cd-r、dvd(digital versatile disk)等计算机可读取的记录介质来提供。
99.进而,将执行本实施方式的处理的程序存储在与互联网等网络连接的计算机上,也可以构成为经由网络下载来提供。另外,也可以构成为由本实施方式执行的程序通过互联网等的网络通路来提供或者分布。
100.虽然对本发明的实施方式以及变形例进行了说明,但这些实施方式以及变形例只是作为一例进行提示,不意在限定发明的范围。这些新的实施方式能够以其他各种方式来实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换、变更。这些实施方式及其变形包含在发明的范围和主旨内,并且包含在专利权利要求所记载的发明及其均等的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1