电动车辆的驱动控制装置的制作方法
本发明涉及一种电动车辆的驱动控制装置。
背景技术:
1、在专利文献1中示出了四轮驱动车的扭矩控制。在该扭矩控制中,基于推定出的路面的坡度来设定与扭矩的变化率相关的参数。在专利文献1中记载了,通过上述设定来避免在上坡起步时前轮和后轮同时打滑,防止车辆的下滑等。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2018-093645号公报
技术实现思路
1、技术问题
2、在摩擦阻力低的上坡行驶中,通过将扭矩的变化率限制为较小的值,从而能够抑制急剧的扭矩的变化,并能够减少打滑的发生。然而,若扭矩的变化率被限制为较小的值,则在扭矩暂时变小的情况下,即使驾驶员紧急地进行油门操作,直到输出能够沿着坡度支承车重的扭矩为止也要花费时间,有可能使车辆产生下滑。
3、本发明的目的在于,提供一种在有可能发生打滑的上坡行驶时,能够抑制打滑与车辆的下滑这两者的电动车辆的驱动控制装置。
4、技术方案
5、本发明的电动车辆的驱动控制装置搭载于具备驱动轮和对所述驱动轮进行驱动的电动马达的电动车辆,
6、所述电动车辆的驱动控制装置具备控制器,该控制器基于油门操作量和车辆状态来控制从所述电动马达输出的扭矩,
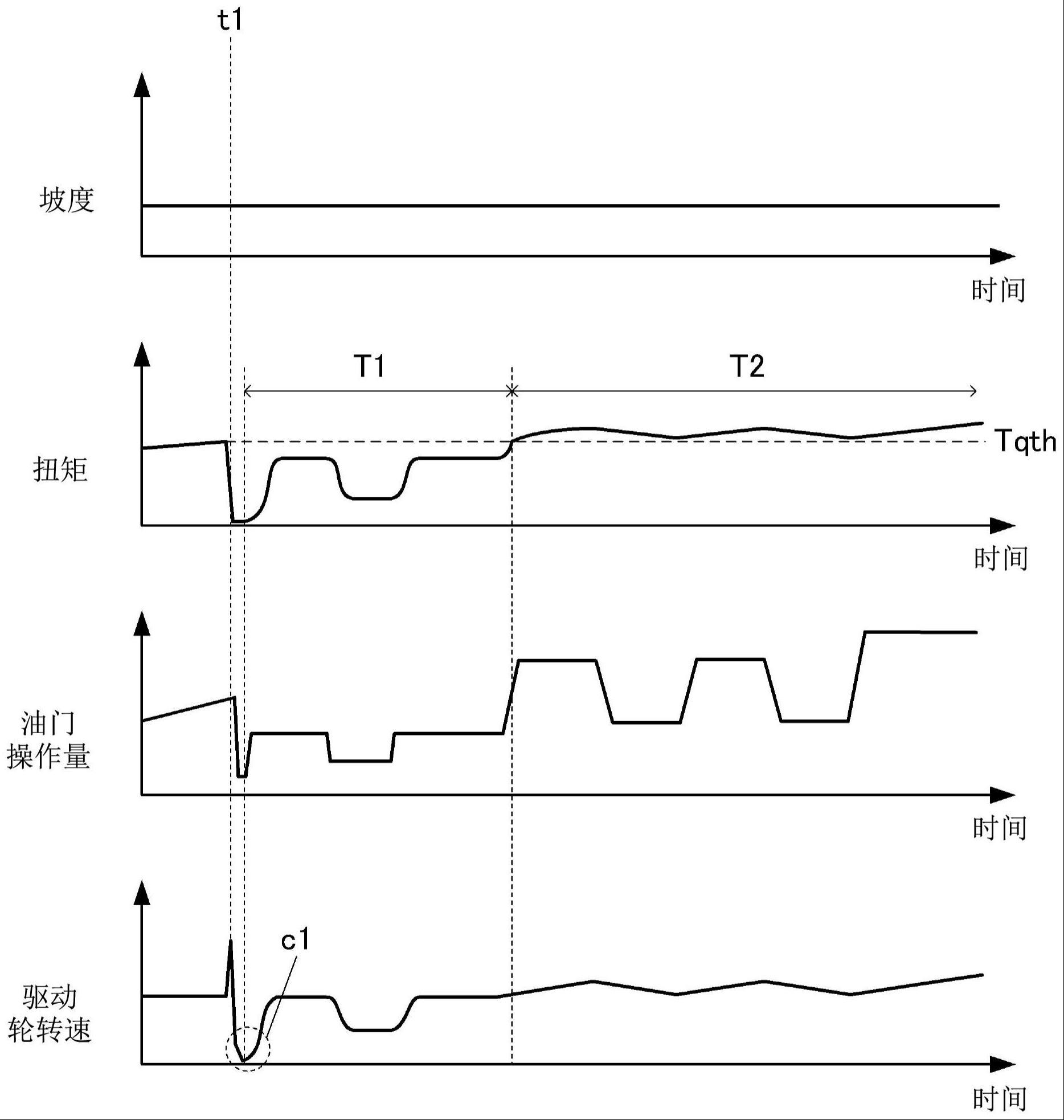
7、所述控制器在第一行驶状态的期间,在所述扭矩小于阈值扭矩的情况下,以第一限制方式来限制所述扭矩的变化率,另一方面,在所述扭矩为所述阈值扭矩以上的情况下,以比所述第一限制方式更平缓的第二限制方式来限制所述扭矩的变化率,所述第一行驶状态是推定为发生打滑的容易度为阈值以上的上坡行驶中。
8、技术效果
9、根据本发明,在第一行驶状态的期间,在从电动马达输出的扭矩为阈值扭矩以上的情况下,通过以第二限制方式来限制扭矩的变化率,从而抑制了由驱动轮输出的扭矩急剧地变化。因此,能够抑制驱动轮发生打滑。另一方面,在第一行驶状态的期间,在从电动马达输出的扭矩小于阈值扭矩的情况下,通过以第一限制方式来限制扭矩的变化率,从而能够比较灵活地使扭矩变大。因此,能够迅速地输出能够沿着坡度支承车重的扭矩,能够减少产生车辆的下滑。
技术特征:
1.一种电动车辆的驱动控制装置,其特征在于,搭载于具备驱动轮和对所述驱动轮进行驱动的电动马达的电动车辆,
2.根据权利要求1所述的电动车辆的驱动控制装置,其特征在于,
3.根据权利要求1所述的电动车辆的驱动控制装置,其特征在于,
4.根据权利要求2所述的电动车辆的驱动控制装置,其特征在于,
5.根据权利要求3所述的电动车辆的驱动控制装置,其特征在于,
6.根据权利要求4所述的电动车辆的驱动控制装置,其特征在于,
7.根据权利要求3所述的电动车辆的驱动控制装置,其特征在于,
8.根据权利要求4所述的电动车辆的驱动控制装置,其特征在于,
9.根据权利要求5所述的电动车辆的驱动控制装置,其特征在于,
10.根据权利要求6所述的电动车辆的驱动控制装置,其特征在于,
技术总结
本发明提供一种在有可能发生打滑的上坡行驶时,能够抑制打滑与车辆的下滑这两者的电动车辆的驱动控制装置。电动车辆的驱动控制装置是搭载于具备驱动轮和对驱动轮进行驱动的电动马达的电动车辆的电动车辆的驱动控制装置。而且,所述电动车辆的驱动控制装置具备基于油门操作量和车辆状态来控制从电动马达输出的扭矩的控制器,控制器在作为被推定为发生打滑的容易度为阈值以上的上坡行驶中的第一行驶状态的期间,在扭矩小于阈值扭矩的情况下,以第一限制方式来限制扭矩的变化率,另一方面,在扭矩为所述阈值扭矩以上的情况下,以比第一限制方式更平缓的第二限制方式来限制扭矩的变化率。
技术研发人员:大黑智宽
受保护的技术使用者:株式会社斯巴鲁
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!