上坡辅助功能退出方法、装置、车辆及存储介质与流程
本申请涉及新能源汽车,特别涉及一种上坡辅助功能退出方法、装置、车辆及存储介质。
背景技术:
1、上坡辅助系统(hill-start assist control,hac),是在车身电子稳定系统(electronic stability program,esp)基础上衍生开发出来的一种功能,它可让车辆在坡上起步时,右脚离开制动踏板车辆仍能继续保持制动几秒,由此,可以使驾驶者轻松的将脚由制动踏板转向油门踏板,以防止溜车而造成事故。
2、考虑到车辆造价、应用及车型等多方面因素,目前仍有许多电动汽车未装配esp或装配的esp无上坡辅助功能,相关技术通过采用电机堵转的方式实现上坡辅助功能。然而,相关技术中电机堵转的转矩方向和整车控制器转矩命令的转矩方向不同,易导致上坡辅助功能退出时,整车出现抖动和冲击现象,大大降低用户驾驶体验。
技术实现思路
1、本申请提供一种上坡辅助功能退出方法、装置、车辆及存储介质,以解决
2、相关技术中采用电机堵转方式实现的上坡辅助功能退出时,电机堵转的转矩突然消失,使得整车出现抖动和冲击现象,用户体验不佳等问题。
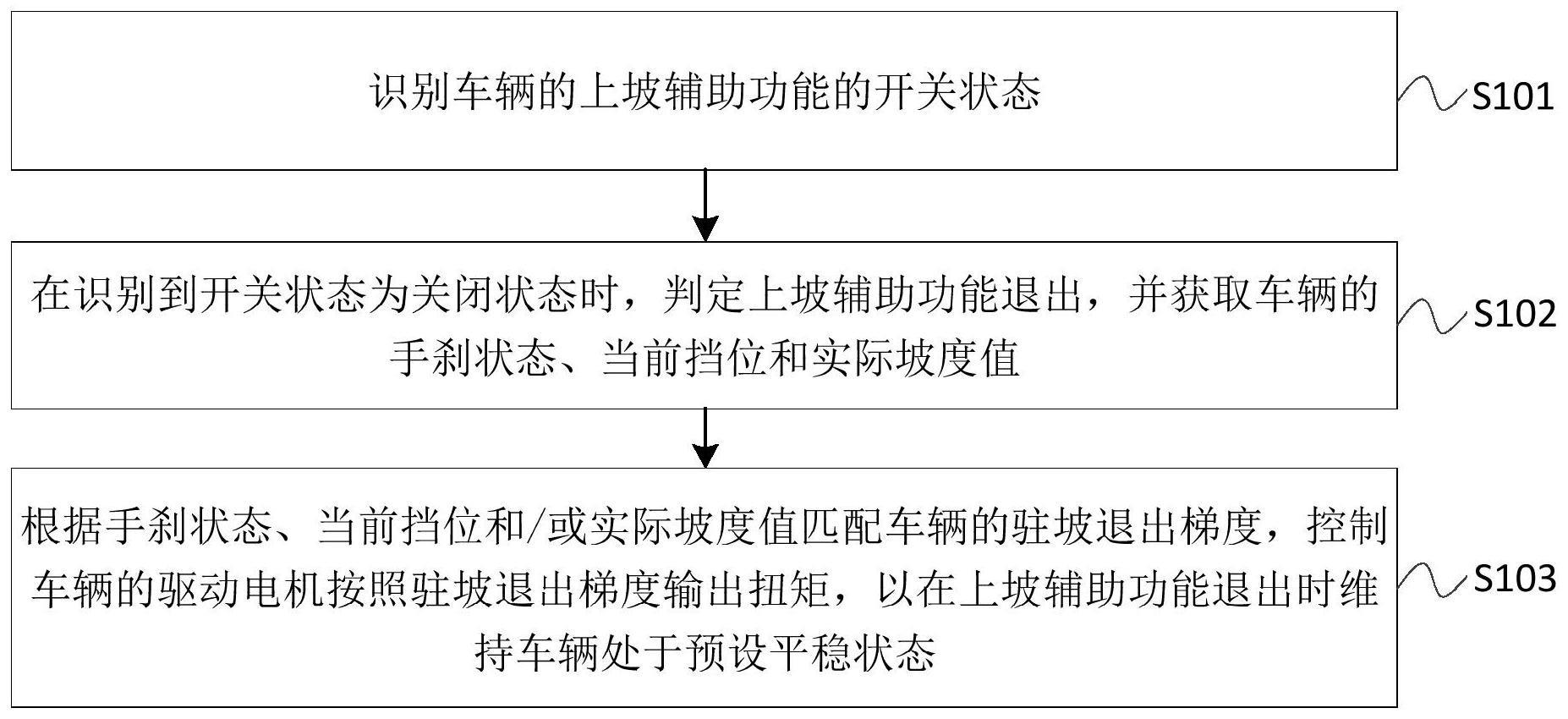
3、本申请第一方面实施例提供一种上坡辅助功能退出方法,包括以下步骤:识别车辆的上坡辅助功能的开关状态;在识别到所述开关状态为关闭状态时,判定所述上坡辅助功能退出,并获取所述车辆的手刹状态、当前挡位和实际坡度值;根据所述手刹状态、所述当前挡位和/或所述实际坡度值匹配所述车辆的驻坡退出梯度,控制所述车辆的驱动电机按照所述驻坡退出梯度输出扭矩,以在所述上坡辅助功能退出时维持所述车辆处于预设平稳状态。
4、可选地,在本申请的一个实施例中,所述根据所述手刹状态、所述当前挡位和/或所述实际坡度匹配所述车辆的驻坡退出梯度,包括:若所述手刹状态为拉起状态、所述当前挡位为驻车挡位或所述当前挡位为空挡位,则所述驻坡退出梯度为第一预设加载梯度;若所述当前挡位为前进挡位、且所述实际坡度值大于预设坡度,则所述驻坡退出梯度为第二预设加载梯度,其中,所述第二预设加载梯度大于所述第一预设加载梯度;若所述当前挡位为后退挡位、且所述实际坡度值小于预设坡度,则所述驻坡退出梯度为第三预设加载梯度,其中,所述第三预设加载梯度的绝对值大于所述第一预设梯。
5、可选地,在本申请的一个实施例中,若所述驻坡退出梯度为第一预设加载梯度,所述控制所述车辆的驱动电机按照所述驻坡退出梯度输出扭矩,包括:判断所述驱动电机的当前转速是否小于第一预设转速;若所述当前转速大于或等于所述第一预设转速,则控制所述驱动电机按照所述第一预设加载梯度输出扭矩,否则控制所述驱动电机按照第四预设加载梯度输出扭矩。
6、可选地,在本申请的一个实施例中,若所述驻坡退出梯度为第二预设加载梯度和第三预设加载梯度,所述控制所述车辆的驱动电机按照所述驻坡退出梯度输出扭矩,包括:判断所述车辆的需求扭矩的绝对值是否大于第一预设扭矩;若所述需求扭矩的绝对值大于所述第一预设扭矩,且所述需求扭矩的绝对值与所述驱动电机的实际输出扭矩的差值绝对值大于第二预设扭矩,或者,所述需求扭矩的绝对值小于或等于所述第一预设扭矩,且所述需求扭矩的绝对值与所述驱动电机的实际输出扭矩的差值绝对值大于第三预设扭矩,则控制所述驱动电机按照所述第二预设加载梯度或所述第三预设加载梯度输出扭矩,否则控制所述驱动电机按照第四预设加载梯度输出扭矩。
7、本申请第二方面实施例提供一种上坡辅助功能退出装置,包括:识别模块,用于识别车辆的上坡辅助功能的开关状态;获取模块,用于在识别到所述开关状态为关闭状态时,判定所述上坡辅助功能退出,并获取所述车辆的手刹状态、当前挡位和实际坡度值;控制模块,用于根据所述手刹状态、所述当前挡位和/或所述实际坡度值匹配所述车辆的驻坡退出梯度,控制所述车辆的驱动电机按照所述驻坡退出梯度输出扭矩,以在所述上坡辅助功能退出时维持所述车辆处于预设平稳状态。
8、可选地,在本申请的一个实施例中,所述控制模块,包括:第一判断单元,用于若所述手刹状态为拉起状态、所述当前挡位为驻车挡位或所述当前挡位为空挡位,则所述驻坡退出梯度为第一预设加载梯度;第二判断单元,用于若所述当前挡位为前进挡位、且所述实际坡度值大于预设坡度,则所述驻坡退出梯度为第二预设加载梯度,其中,所述第二预设加载梯度大于所述第一预设加载梯度;第三判断单元,用于若所述当前挡位为后退挡位、且所述实际坡度值小于预设坡度,则所述驻坡退出梯度为第三预设加载梯度,其中,所述第三预设加载梯度的绝对值大于所述第一预设梯。
9、可选地,在本申请的一个实施例中,若所述驻坡退出梯度为第一预设加载梯度,所述控制模块进一步用于判断所述驱动电机的当前转速是否小于第一预设转速;若所述当前转速大于或等于所述第一预设转速,则控制所述驱动电机按照所述第一预设加载梯度输出扭矩,否则控制所述驱动电机按照第四预设加载梯度输出扭矩。
10、可选地,在本申请的一个实施例中,若所述驻坡退出梯度为第二预设加载梯度和第三预设加载梯度,所述控制模块进一步用于判断所述车辆的需求扭矩的绝对值是否大于第一预设扭矩;若所述需求扭矩的绝对值大于所述第一预设扭矩,且所述需求扭矩的绝对值与所述驱动电机的实际输出扭矩的差值绝对值大于第二预设扭矩,或者,所述需求扭矩的绝对值小于或等于所述第一预设扭矩,且所述需求扭矩的绝对值与所述驱动电机的实际输出扭矩的差值绝对值大于第三预设扭矩,则控制所述驱动电机按照所述第二预设加载梯度或所述第三预设加载梯度输出扭矩,否则控制所述驱动电机按照第四预设加载梯度输出扭矩。
11、本申请第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的上坡辅助功能退出方法。
12、本申请第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的上坡辅助功能退出方法。
13、由此,本申请至少具有如下有益效果:
14、本申请实施例可以在上坡辅助功能退出时,根据退出时整车的不同状态,控制车辆的驱动电机按照不同的驻坡退出梯度输出扭矩,从而可以使得堵转扭矩按照梯度减少,避免堵转扭矩突然消失导致整车出现抖动和冲击现象,提升上坡辅助功能退出时整车的平稳性,提升使用上坡辅助功能的舒适性。由此,解决了相关技术在驻坡过程中电机输出转矩的方向和踩油门时整车控制器转矩命令的方向不同,导致在功能退出时车辆抖动,从而降低用户驾乘体验等问题。
15、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种上坡辅助功能退出方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述根据所述手刹状态、所述当前挡位和/或所述实际坡度匹配所述车辆的驻坡退出梯度,包括:
3.根据权利要求2所述的方法,其特征在于,若所述驻坡退出梯度为第一预设加载梯度,所述控制所述车辆的驱动电机按照所述驻坡退出梯度输出扭矩,包括:
4.根据权利要求2所述的方法,其特征在于,若所述驻坡退出梯度为第二预设加载梯度和第三预设加载梯度,所述控制所述车辆的驱动电机按照所述驻坡退出梯度输出扭矩,包括:
5.一种上坡辅助功能退出装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,所述控制模块,包括:
7.根据权利要求6所述的装置,其特征在于,若所述驻坡退出梯度为第一预设加载梯度,所述控制模块进一步用于:
8.根据权利要求6所述的装置,其特征在于,若所述驻坡退出梯度为第二预设加载梯度和第三预设加载梯度,所述控制模块进一步用于:
9.一种车辆,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如权利要求1-4任一项所述的上坡辅助功能退出方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求1-4任一项所述的上坡辅助功能退出方法。
技术总结
本申请涉及新能源汽车技术领域,特别涉及一种上坡辅助功能退出方法、装置、车辆及存储介质,其中,方法包括:识别车辆的上坡辅助功能的开关状态;在识别到开关状态为关闭状态时,判定上坡辅助功能退出,并获取车辆的手刹状态、当前挡位和实际坡度值;根据手刹状态、当前挡位和/或实际坡度值匹配车辆的驻坡退出梯度,控制车辆的驱动电机按照驻坡退出梯度输出扭矩,以在上坡辅助功能退出时维持车辆处于预设平稳状态。由此,解决了相关技术中采用电机堵转方式实现的上坡辅助功能退出时,电机堵转的转矩突然消失,使得整车出现抖动和冲击现象,用户体验不佳等问题。
技术研发人员:舒晖,杭孟荀,王瑛,钱兆刚,陶文勇,闫肖梅,凤志民
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!