一种应用于行星轮组式水陆两栖机器人的折展式减阻导流罩
1.本发明属于水陆两栖机器人领域,更具体地,涉及一种应用于行星轮组式水陆两栖机器人的折展式减阻导流罩。
背景技术:
2.从20世纪50年代以来,人类将目光投向水域,不断研发水陆两栖机器人,各种新式水陆两栖机器人层出不穷,比如:履带式水陆两栖机器人、行星轮组式水陆两栖机器人等。水陆两栖机器人不管是在军事还是民用上,都扮演着不可替代的角色,它的重要性在日益提高。由于水陆两栖机器人在陆地运行时,环境介质为空气,在水域运行时,环境介质为水,水的阻力大于空气,所以水陆两栖机器人在水域中运行时的减阻成为了其研发中极其重要的一点。
3.目前,就行星轮组式水陆两栖机器人来说,其在陆地运行时,行星轮组需要完成高速行驶、跨沟越障等功能;而在水下运行时,由水下推进器完成航行,行星轮组的安装破坏了连贯的流线型表面,且水流从行星轮组间隙中通过,会造成较大的额外阻力,从而使行星轮组成为一种阻力较大的负载。因此,需要在行星轮组前方添加减阻导流罩,改善行星轮组的水下阻力特性,同时减阻导流罩不能对水陆两栖机器人在陆地上的运行造成阻碍。
4.基于上述需求考虑,所设计的减阻导流罩应具有折展功能,当行星轮组式两栖机器人在陆域运行时,导流罩能够收起以致于不妨碍行星轮组的陆地越障运动,保证两栖机器人的高速高通性能;在水域运行时,能够展开成特定的流线型外形对行星轮组部位进行减阻,保证两栖机器人的高速低阻性能。且要求减阻导流罩结构简单、自由度小,状态之间的切换快捷高效。
5.申请号为202110610420.1的中国专利申请公开了一种腿浆复合型水陆两栖机器人,其采用在机架组件端板外侧添加一体成型的弧形减阻板的方式减阻。但是由于其覆盖的面积不大,故减阻效果十分有限,在水下运行时还是会受到不小的阻力。申请号202110151849.9的中国专利申请公开了一种水陆两栖车的减阻飞翼结构,其通过车体在水中航行时飞翼结构上下翼面产生的压差,形成上升力,带动水陆两栖车体上浮,减小车体吃水深度,达到减小航行流体阻力的效果;但是其控制较为复杂,成本较高,且折叠后占用空间较大。
6.由此可见,现有水陆两栖机器人或水陆两栖车的减阻装置还存在一定的缺陷,且不存在用于行星轮组式水陆两栖机器人的减阻装置。
7.因此,寻求一种能应用于行星轮组式水陆两栖机器人的减阻装置具有重要意义。
技术实现要素:
8.针对现有技术的缺陷,本发明的目的在于提供一种应用于行星轮组式水陆两栖机器人的折展式减阻导流罩,通过新型的结构设计,其能在解决现有行星轮组式水陆两栖机器人在水域运行时阻力较大的问题,同时还能较好的保证陆地运行功能。
9.为实现上述目的,本发明提供一种应用于行星轮组式水陆两栖机器人的折展式减阻导流罩,其包括导流板单元、导流板折展单元以及电机驱动单元,导流板单元包括多块,多块导流板在展开后首尾连接成一体以形成一段完整的圆弧,并在收缩后上下堆积层叠为一体,导流板单元与导流板折展单元相连,导流板折展单元为连杆机构,能伸长或者缩短,导流折展单元与电机驱动单元连接为一体,工作时,在电机驱动单元正转或者反转的驱动下,导流板折展单元伸长或者缩短,在伸长时带动多块导流板展开形成一段完整的圆弧板,包罩于行星轮组前方,用于减小在水域运行环境下的阻力,在缩短时带动多块导流板堆积层叠为一体,以让位于行星轮组,供行星轮组在陆地行走。
10.以上发明构思中,水下工作时,在电机驱动单元正转的驱动下,导流板折展单元伸长,在伸长时带动多块导流板展开形成一段完整的圆弧板,其具有流线型外形,包罩于行星轮组前方,可以改变行星轮组部位的流场结构,以减小水下阻力;陆地工作时,为了不妨碍行星轮组的陆地越障运动,在电机驱动单元反转的驱动下,导流板折展单元缩短,在缩短时带动多块导流板堆积层叠为一体,以让位于行星轮组。水下工作时,展开成流线型外形(圆弧形),改变行星轮组部位的流场结构,以减小水下阻力。陆地工作时,为了不妨碍行星轮组的陆地越障运动,需要将导流罩收起折叠。
11.进一步的,所述导流板折展单元包括两联动机构,两联动机构分别为折展组件和剪叉组件,折展组件包括长轴和顶杆,顶杆成对出现,一对顶杆的一端铰接在长轴两端,且另一端连接在导流板相对的两个弧形侧面处,剪叉组件包括多根呈弧形的曲杆,多根弧形曲杆在中心处交叉连接且在端头处首尾连接以形成剪叉状的交叉伸缩状,在多根弧形曲杆的中心交叉处设置有中转轴,每个中转轴处连接有一根长轴,长轴穿过中转轴端头处的通孔,实现折展组件和剪叉组件的互连。
12.进一步的,所有导流板折叠后层叠在一起时位于顶层的导流板为出发端导流板,位于底层的导流板为终点端导流板,出发端导流板上连接有两个相互平行的长轴,该长轴平行于导流板整体形成的弧形板的母线,其中一个长轴固定并贴合于出发端导流板的内弧面上,另一个长轴固定并贴合在与出发端导流板相邻且能拼接为一体的下一块导流板端部处,同时在出发端导流板上沿宽度方向的两侧上铰接有一对顶杆,该一对顶杆另一端同时铰接在与出发端导流板相邻接的下一块导流板上的长轴上,除了出发端导流板上固定以及贴合于内弧面的长轴外,剩余长轴都铰接有一对顶杆,长轴两端与顶杆配合,从而实现导流板整体与导流板折展单元的连接。
13.进一步的,折展组件包括五根长轴和十根顶杆,剪叉组件包括四根上曲杆、四根下曲杆、五根中转轴、两根半下曲杆、两根半上曲杆以及十根边转轴,四根上曲杆和四根下曲杆两两成对,两根半下曲杆和两根半上曲杆两两成对,每对上曲杆和下曲杆中心通过中转轴相连,每对半上曲杆和半下曲杆的一端通过中转轴连接为一体,同时该对半上曲杆和半下曲杆各自的另一端分别通过边转轴连接一根上曲杆和一根下曲杆,上曲杆和下曲杆、半上曲杆和半下曲杆均通过边转轴相连形成首尾相连的交叉伸缩体,从而实现了两个机构的互连,进而达到联动效果。
14.进一步的,剪叉组件为球面剪叉组件,其各转动副轴线均始终相交于同一个球心,且上曲杆和下曲形杆为圆心相同、圆心角相同、半径不同的相邻弧线,上半曲形杆和下半曲形杆也为圆心相同、圆心角相同、半径不同的相邻弧线,以能在折叠的过程中实现平滑无干
涉地堆叠,使整个过程更流畅。
15.进一步的,所有导流板上均设有v型沟槽,v型沟槽均匀连续的布满导流板整体的外弧面,单个v型沟槽的高度和宽度相等,以能起到最好的减阻效果,进而更好地减小折展导流罩表面的摩擦阻力。
16.进一步的,所述终点端导流板端面为斜面结构,出发端导流板的端面同样为斜面结构,位于终点端导流板和出发端导流板之间的剩余导流板的两端端面同样为斜面结构,并且相邻两块导流板的斜面相互匹配,以使折展时借助斜面,更方便更省力地抬升导流板。
17.进一步的,电机驱动单元包括驱动支撑板和动力传递组件,驱动支撑板包括相对设置的驱动支撑板上板和驱动支撑板下板,驱动支撑板上板通过折展组件的顶杆与导流板单元连接,驱动支撑板上板和驱动支撑板下板之间设置有动力传递组件,动力传递组件包括多个驱动轴,多个驱动轴相互平行设置,每个驱动轴上均设置有齿轮,相邻驱动轴上的齿轮相互啮合,多个驱动轴贯穿相对设置的驱动支撑板上板和驱动支撑板下板,
18.多个驱动轴中排列在起始位的为驱动输入轴,排列在最末位的为驱动轴出轴,驱动输出轴用于接收外界动力输入,并通过齿轮将动力传输至驱动输出轴,驱动支撑板通过驱动输出轴与剪叉组件连接,以将动力传输给剪叉组件。
19.进一步的,动力传递组件包括五个驱动轴,分别为驱动输入轴,驱动输出轴以及位于驱动输入轴和驱动输出轴之间的驱动传递轴,每根驱动轴上连接的齿轮的模数和齿数均相等,相邻两个齿轮的中心距也相等,以提高传动的平稳性,此外,导流板单元包括五块导流板。
20.进一步的,所述电机驱动单元还包括防水罩,防水罩与两块驱动支撑板榫接并位于两块驱动支撑板之间,其通过凸台中心孔与驱动输入轴配合,防水罩一端与外界水环境接触,另一端为开口,其开口端安装在水陆两栖机器人体内,用于接受外界通入的冷却气,防止动力传递组件运动时过热。
21.本发明中,导流板折展单元与导流板单元相连,导流板折展单元的端部与电机驱动单元相连,导流板折展单元包括折展组件和剪叉组件。折展组件中连接出发端导流板的顶杆同时连接电机驱动单元的驱动支撑板上板,其余顶杆用于连接相邻的导流板。折展组件为连杆机构,在导流板的抬升和堆叠过程中起辅助作用。剪叉组件的中转轴与长轴配合,间接地与导流板连接,通过剪叉组件的伸缩,可实现导流板的折展。本发明中,导流板采用堆叠式的折展方案,剪叉组件中实际包括多个球面四边形,将剪叉组件中球面四边形中转轴之间的距离变化转化为对折展组件的驱动,借助折展组件实现导流板的堆叠。所述电机驱动单元通过顶杆与出发端导流板相连,通过驱动输出轴与剪叉组件相连。电机驱动单元连接电机,将电机的转动传递并转化为剪叉组件的伸缩,折展导流罩整体通过电机驱动单元与水陆两栖机器人组装为一体。所述折展导流罩在导流板折展单元和电机驱动单元的共同作用下进行折展,实现降低水陆两栖机器人水域运行时阻力的功能。
22.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下
23.有益效果:
24.本发明提供一种折展式减阻导流罩,多块导流板拼接形成的整体为圆弧外形的罩板,其展开的流线型外形可以有效地减小水中的压差阻力。每块导流板上开有连续对称的横向v型沟槽,沟槽均匀布置在圆弧形导流板整体的表面,可以有效地减小水流与折展式减
阻导流罩表面的摩擦阻力。每块导流板上两端采用斜面结构,有助于导流板的抬升。所述导流板折展单元可以通过剪叉组件和折展组件的联动实现导流板的折叠,剪叉组件收缩时,折展组件的顶杆通过三角形结构,将导流板抬升,以达到堆叠的状态;伸展时,折展组件的顶杆将导流板下倾,以达到展开的状态。堆叠和展开的整个过程快速高效连贯,且具有较高的稳定性。
25.本发明剪叉组件采用球面剪叉结构,每个弧形杆都在以所有转动副的轴线相交的点为球心、自身弧线半径为半径的球面上运动,可以在空间内完成导流罩流线型外形的折展,且自由度少(自由度为1),同时不会发生干涉。
26.本发明所述电机驱动单元中包含防水罩,当动力传递组件在机器人在水域运行时,水不会渗入电机驱动单元中,增加了动力传递的可靠性。
附图说明
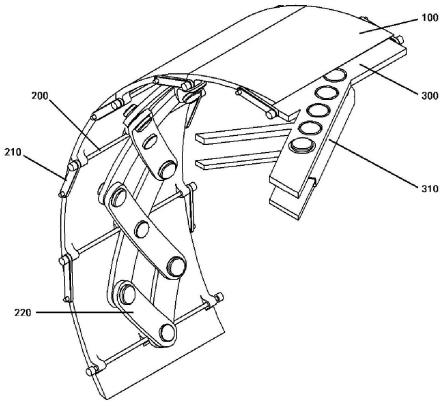
27.图1是本发明实施例提供的折展导流罩的结构示意图;
28.图2是本发明实施例提供的导流板的结构示意图;
29.图3是本发明实施例提供的导流板折展单元的结构示意图;
30.图4是本发明实施例提供的剪叉组件的结构示意图;
31.图5是本发明实施例提供的电机驱动单元的结构示意图;
32.图6是本发明实施例提供的动力传递组件的结构示意图;
33.图7是本发明实施例提供的折展导流罩一个单元的折展过程示意图;
34.图8是本发明实施例提供的折展导流罩整体的折展过程示意图;
35.图9是本发明实施例提供的已安装折展导流罩的行星轮组式水陆两栖机器人陆地运行和水域运行的结构示意图,其中陆地运行时导流罩为完全折叠状态,水域运行时导流罩为完全展开状态。
36.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
37.100为导流板单元,200为导流板折展单元,210为折展组件,211为顶杆,212为长轴,220为剪叉组件,221为边转轴,222为上曲杆,223为下曲杆,224为中转轴,225为下半曲杆,226为上半曲杆,227为轴向挡圈,300为电机驱动单元,310为动力传递组件,311为驱动输出轴,312为齿轮,313为驱动传递轴(驱动传递轴有三根,可以理解为驱动二轴、驱动三轴和驱动四轴,三根驱动传递轴),314为驱动输入轴(其与电机连接轴相连,以接受电机驱动,并通过齿轮把动力传递给驱动输出轴),315为轴承,316为平垫圈,320为防水罩,330为驱动支撑板。
具体实施方式
38.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
39.针对现有技术的以上缺陷或改进需求,本发明基于行星轮组式水陆两栖机器人在水下的阻力分析,提出了一种应用于行星轮组式水陆两栖机器人上的折展式减阻导流罩。通过在行星轮组前方添加本发明申请的可同时实现减阻和折叠的折展导流罩,能减少水流的穿行,改善行星轮组的水下阻力特性,能有效减少行星轮组在水下时受到的阻力。此外,
该折展导流罩折展方便,结构简单,运行稳定,自由度少,且较为快捷,有利于在行星轮组式水陆两栖机器人等相关平台上推广运用。
40.本发明提供如下技术方案:一种应用于行星轮组式水陆两栖机器人上的折展式减阻导流罩,包括:导流板单元、导流板折展单元以及电机驱动单元。导流板单元包括多块导流板,多块导流板均为弧形,多块弧形的导流板相互拼接成整体,成为一个更大的弧形,即为,所有导流板在完全展开后拼接成一段完整的圆弧,所有导流板折叠后层叠堆积在一起,此时位于顶层的导流板为出发端导流板,位于底层的导流板为终点端导流板,出发端导流板上一侧连接有平行于导流板整体形成的弧形板的母线的长轴,其固定并贴合于出发端导流板的内弧面上,同时在出发端导流板上沿宽度方向的两侧上铰接有一对顶杆,该一对顶杆另一端同时铰接在电机驱动板上板两侧。长轴中间与中转轴配合,除了出发端导流板上固定以及贴合于内弧面的长轴外,其他长轴都铰接有一对顶杆,长轴两端与顶杆配合,从而实现导流板整体与导流板折展单元的连接。
41.所述导流板折展单元包括两联动机构,两联动机构分别为折展组件和剪叉组件。折展组件和剪叉组件共同包括十根顶杆、五根长轴、十根边转轴、四根上曲杆、四根下曲杆、五根中转轴、两根半下曲杆、两根半上曲杆。其中,顶杆左右布置于长轴两端,上曲杆和下曲杆中心通过中转轴相连,半上曲杆和半下曲杆的连接方式同于上曲杆和下曲杆的连接方式。上曲杆和下曲杆、半上曲杆和半下曲杆均通过边转轴相连形成首尾相连的交叉伸缩体,类似于剪叉,从而实现了两个机构的串联,达到联动的效果。
42.所述电机驱动单元包括上下两块的驱动支撑板、动力传递组件和防水罩。所述动力传递组件包括五根驱动轴、五个齿轮和两个轴承。其中,五个齿轮的模数和齿数都相等,相邻两个齿轮的中心距也相等,以提高传动的平稳性。
43.所述导流板采用圆弧型外形,可以有效地减小压差阻力。导流板上开有连续对称v型沟槽,v型沟槽均匀布置在圆弧形导流板整体的表面,v型沟槽的高度和宽度相等,此时可有最好的减阻效果,以更好得减小机器人行星轮组的折展导流罩表面的摩擦阻力。
44.所述剪叉组件为球面剪叉结构,各转动副轴线均始终相交于球心,且上下弧形杆为圆心相同、圆心角相同、半径不同的相邻弧线,上下半弧形杆也为圆心相同、圆心角相同、半径不同的相邻弧线。在折叠的过程中可实现平滑无干涉地堆叠,使整个过程更流畅。
45.所述顶杆与剪叉组件构成
的
结构可实现导流板之间的同步折展运动,能提高运动的稳定性。
46.所述动力传递组件中,驱动输出轴和驱动传递轴上不与齿轮配合的轴段的直径小于驱动输入轴上对应轴段的直径,以防止剪叉组件在收缩过程中,上曲杆与驱动输入轴、驱动输出轴和驱动传递轴产生干涉和碰撞,导致驱动轴和上曲杆的损坏。
47.所述动力传递组件在工作时,电机的正反转传递给驱动输入轴,经驱动轴上的齿轮组传递至驱动输出轴,通过驱动输出轴控制剪叉组件的半下曲杆摆动,转换为剪叉组件整体的伸缩,进而控制导流罩的折展。
48.在本发明的一个实施例中,导流板共有五块,五块导流板之间通过导流板折展单元相连,终点端导流板与电机驱动单元通过导流板折展单元相连。导流板折展单元分为两个部分:折展组件和剪叉组件。折展组件为连杆机构,通过其连接相邻导流板以及导流板与剪叉组件,在导流板的抬升和堆叠过程中起辅助作用。剪叉组件为空间连杆机构,可通过其
连杆之间的伸缩,控制导流板的堆叠和展开。电机驱动单元包括驱动支撑板、动力传递组件和防水罩。水陆两栖机器人由陆地运行转为水域运行时,电机正向转动,通过动力传递组件,将电机的转动传递给剪叉组件,推动剪叉组件的伸张,在折展组件的辅助下,使导流板单元展开,排成一个圆心和行星轮组中心重合的弧线,从而实现降低水陆两栖机器人水下阻力的效果。当进入陆地运行时,电机反向转动,带动剪叉组件的收缩,在折展组件的辅助下,使导流板折起并堆叠。
49.参阅图1至图8,本发明较佳实施方式提供的一种折展导流罩具有优良的减阻效果,能有效减少在行星轮组空隙中穿行的水流,进而降低水陆两栖机器人水下行进的阻力。同时,其能实现快捷高效的折展,在陆地运行和水域运行之间能实现方便快速的状态切换,能够广泛的应用于行星组式水陆两栖机器人等相关平台上。
50.图1是本发明实施例提供的折展导流罩的结构示意图,如图1所示,本发明提供的折展导流罩包括:导流板单元100,导流板折展单元200和电机驱动单元300。其中,导流板折展单元200包括折展组件210和剪叉组件220。所述导流板单元100及所述电机驱动单元300分别连接于所述折展组件210和剪叉组件220。电机驱动单元300包括动力传递组件310、防水罩320和驱动支撑板330。所述动力传递组件310连接于所述驱动支撑板330,所述防水罩320榫接于所述驱动支撑板330。
51.图2是本发明实施例提供的导流板的结构示意图,如图2所示,导流板单元包括多块,多块在沿剪叉组件构成的圆弧方向上能依次拼接为一个更大圆弧,导流板呈圆弧型外形,其上有均匀布置的连续对称v型沟槽。导流板沿宽度方向两侧通过长轴212与顶杆221连接,即与折展组件210连接;长轴212中间与中转轴224连接,即与剪叉组件220连接,以使导流板与剪叉组件相连。
52.图3是本发明实施例提供的导流板折展单元的结构示意图,如图3所示,折展组件210包括十个顶杆211、五个长轴212。剪叉组件220包括十个边转轴221、四个上曲杆222、四个下曲杆223、五个中转轴224、两个半下曲杆225、两个半上曲杆226以及十个轴向挡圈227。长轴212两端各铰接一个顶杆211。每个长轴212中间与一个中转轴224连接,且长轴为水平状态。每个上曲杆222和下曲杆223的中心通过中转轴224连接,每个半上曲杆226和半下曲杆225一端通过中转轴224连接。处于中间位置的两个上曲杆222两端通过边转轴221分别连接一个下曲杆223,两个下曲杆223两端通过边转轴221分别连接一个上曲杆222。处于两端的两个上曲杆222靠内的一端通过边转轴221与一个下曲杆223连接,另一端通过边转轴221与一个半下曲杆225连接,两个下曲杆223靠内的一端通过边转轴221与一个上曲杆222连接,另一端通过边转轴221与一个半上曲杆226连接。每个边转轴221通过轴向挡圈227限制其轴向移动。
53.图4是本发明实施例提供的剪叉组件的结构示意图,如图4所示,在剪叉组件220中,上曲杆222和下曲杆223为圆心相同、圆心角相同、半径不同的相邻弧线。半上曲杆226和半下曲杆225也为圆心相同、圆心角相同、半径不同的相邻弧线,可以在不产生干涉的情况下实现空间球面折叠。
54.图5是本发明实施例提供的电机驱动单元的结构示意图,如图5所示,电机驱动单元300包括动力传递组件310、防水罩320和驱动支撑板330。动力传递组件310与驱动支撑板330配合,同时与防水罩320上平面凸台同轴心配合。防水罩320与驱动支撑板下板榫接。
55.图6是本发明实施例提供的动力传递组件的结构示意图,如图6所示,动力传递组件310包括驱动输出轴311、齿轮312、驱动传递轴313、驱动输入轴314、两个轴承315和四个平垫圈316。齿轮共有五个,驱动传递轴共有三个,且相互平行,三个驱动传递轴各连接一个齿轮,齿轮相互啮合,可实现动力传递。驱动输入轴与电机伸出轴相连接,以能受电机驱动。驱动输入轴两侧分别设置有一个轴承315,在驱动输出轴311和驱动传递轴313上由于安装需要均在一侧设置有平垫圈316.
56.电机驱动单元的安装的过程为,第一步:将齿轮312放置于驱动支撑板330下板的预定位置上,限制其水平方向上的自由度;第二步:将防水罩320通过驱动支撑板330下板周围开设的沟槽与下板榫接,并在沟槽中涂防水剂,防止水渗入;第三步:将轴承315和平垫圈316安装在驱动支撑板330的沉头孔内,同轴心配合;第四步:三根驱动传递轴313和驱动输入轴314依次连接驱动支撑板330上板、防水罩320、齿轮312和驱动支撑板330下板,与防水罩配合处的圆周面上涂防水剂,防止水渗入;第五步:驱动输出轴311依次连接驱动支撑板330上板、半上曲杆226、半下曲杆225、防水罩320、齿轮312和驱动支撑板330下板,与防水罩配合处的圆周面上涂防水剂,防止水渗入;至此,整个电机驱动单元安装完成。
57.所述电机驱动单元300与剪叉组件220通过驱动输出轴311连接,驱动输出轴311与剪叉组件220中一端的半下曲杆225和半上曲杆226同轴心配合,且与半下曲杆225通过圆柱销周向固定,以实现同步转动。当电机通过驱动输入轴314输入转矩时,经过齿轮312的传递,将转矩传递至驱动输出轴311,进一步带动半下曲杆225的转动,从而实现整个剪叉组件220的折展。
58.所述电机驱动单元300与折展组件210通过驱动支撑板330上板两侧的凸台连接,顶杆211的一端与驱动支撑板330上板两侧的凸台配合,凸台上的大端通过螺纹连接形式与小端配合。与顶杆211安装时,旋下凸台上的大端,安装完成时,再旋上凸台上的大端,以实现轴向固定,顶杆的另一端与长轴212配合。当导流板展开时,导流板与长轴212配合的一端下倾。当导流板堆叠时,导流板与长轴212配合的一端抬升,以实现对导流板折展的辅助作用。
59.图7是实施例提供的折展导流罩一个单元(一块导流板)的折展过程示意图,如图7所示,导流板100、折展组件210和剪叉组件220构成了一个三角形,当剪叉组件220收缩时,中轴之间的距离减小,即长轴之间的距离减小,顶杆和导流板的长宽不变,从而导致三角形以剪叉组件为底边的高增加,使导流板抬升。
60.图8是本发明实施例提供的折展导流罩整体的折展过程示意图,如图8所示,在折展过程中,导流板的运动同步性较高,折叠后占用空间较小,整个过程中折展组件和剪叉组件的相互配合相互协作,不存在独立的动作,整个过程快捷高效。由于导流板两侧为斜面结构,故在展开和堆叠过程中存在缓冲,不会产生刚性冲击,结构简单且稳定性较高,有利于折展导流罩的推广应用。
61.图9是本发明实施例提供的已安装折展导流罩的行星轮组式水陆两栖机器人陆地运行和水域运行的结构示意图,其中陆地运行时导流罩为完全折叠状态,导流板类似于瓦片层叠在一起,水域运行时导流罩为完全展开状态,展开成整体的一个弧形面板状。如图9所示,折展导流罩安装于行星轮组的前方,其驱动支撑板为水平状态,导流板的外侧面与行星轮组的外侧面重合,导流板构成的圆弧的圆心与行星轮组的中心重合,从而确定折展导
流罩的安装位置。折展导流罩的驱动支撑板一端与车体配合,并在配合面缝隙中涂防水剂,以防止在水域中运行时,水渗入车体中导致电路短路烧毁等问题。
62.具体的,当其在水域运行时,导流罩展开,展开的过程中,电机正向转动,通过动力传递组件(主要依靠齿轮组),将电机的转动传递给驱动输入轴,由驱动输入轴带动半下曲杆的摆动,进而推动剪叉组件的伸展,在折展组件的辅助下,使导流板展开,直到所有导流板拼接形成一个圆心和行星轮组中心重合的弧线板。当其在陆地运行时,导流罩折叠,折叠的过程中,电机反向转动,带动剪叉组件的收缩,在折展组件和导流板上的斜面的辅助下,使导流板折起并同向堆叠。
63.工作时,当水陆两栖机器人在水域运行时,减阻导流罩展开成流线型外形,以减小其前进的阻力;在陆地运行时,减阻导流罩折叠,不妨碍行星轮组的陆地越障运动。具体的,当水陆两栖机器人在水域运行时,导流罩完全展开,五块导流板构成的圆弧的圆心与行星轮组中心重合,以获得最好的水动力特性。折展导流罩的驱动电机以及布线安放于机器人的内侧,以防止沾水而导致短路。当水陆两栖机器人在陆地运行时,导流罩完全折叠,且折叠后不会与行星轮组的运动产生干涉。且所占空间较小,机器人在陆地移动时导流罩带来的阻力也较小。
64.本领域的技术人员容易理解,本发明的折展导流罩不仅运用于行星轮组式两栖机器人,行星轮组式水陆两栖机器人只是本发明的一个应用案例,运用于其他地方也是本发明的保护范围。以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1