一种智能洗车机器人的制作方法
1.本发明涉及自动无人洗车技术领域,尤其涉及一种智能洗车机器人。
背景技术:
2.随着高科技的飞速发展,洗车行业从半自动洗车已经快速发展到智能化洗车,实现完全代替人工洗车的过程。
3.申请公布号为cn202111233406.0的中国专利申请文件公开了一种智能化自动洗车机器人,该方案提供的一种智能化自动洗车机器人,包括补给连接座和洗车机器人本体。所述洗车机器人本体包括基座、移动机构、锂电池、自动控制模块、第一水箱、第一清洁液贮存箱、喷水管、清洁液喷管、支撑架、第一液泵和第二液泵和热风机。产生的技术效果是通过洗车机器人本体采用无接触的洗车方案,通过设计l形支撑架连接喷水管和喷射管,通过洗车机器人本体环绕车辆移动实现清洗全覆盖,洗车全程不需要通过毛刷辊接触车体,一方面降低了设备成本和设备维护成本,省去了毛刷辊的定期清洗、保养和更换的步骤,不需要控制毛刷辊转动的复杂的机械结构,使用寿命更高,还可避免毛刷辊上粘附的泥沙刮伤车漆的风险,从而节约设备成本的同时,实现高效高质量的洗车。
4.结合上述申请文件的附图1-图2,我们可以得出该申请文件的技术方案是通过设计l形支撑架连接喷水管和喷射管,实质是在l形支撑架上设置了多个喷水管和喷射管,通过不同位置的喷水管和喷射管向车辆的不同位置喷水并依靠水的冲刷作用冲走脏污而实现洗车的目的,但是每个喷水管和喷射管只能向各自固定对应的区域喷水,是一种在移动清洗过程中进行单一方向的清洗方式,并且从附图中可得知,相邻喷水管之间存在一定的距离,这样在喷水的过程中,直接与喷水管、喷射管对应的区域被清洗的很干净,但是边缘区域的脏污不能被彻底冲洗,尤其遇到脏污很多并且处于相邻两个喷水管之间临界区域时或者车尾死角位置时,上述技术单一方向的清洗方式就不能达到彻底清洗脏污的目的,必要的时候需要人工清洁未清洗掉的脏污,因此车辆洗净效率低,智能自动化程度低。
技术实现要素:
5.为了解决上述单一方向的清洗方式导致车辆洗净效率低的技术问题,本发明提供了一种智能洗车机器人,通过行走装置带动主体、仿形臂环绕待洗车辆一周运动的过程中,有清洁装置对其全身进行扫描式清洗。
6.为了达到上述目的,本发明是通过以下技术方案实现的:一种智能洗车机器人,用于以三轴联动的方式对待洗车辆上的脏污进行移动线扫式清洗,包括:主体,位于待洗车辆的副驾驶门的一侧,与待洗车辆之间存在预设距离。
7.行走装置,设置在主体上,与主体的底面可拆卸连接,用于按照预设路径带动主体从初始位置沿y轴向行驶至副驾驶门的一侧,其中y轴向为行走装置前进的方向。
8.仿形臂,其一端固定于主体的一侧壁上,并朝向待洗车辆,另一端位于待洗车辆的
上方。行走装置用于沿y轴方向带动主体从副驾驶门的一侧顺时针环绕待洗车辆一周运动,进而带动仿形臂环绕主体运动。
9.移动装置,分别设置在仿形臂的上部、下部,与仿形臂滚动连接,移动装置用于分别沿z轴向、x轴向在从仿形臂上往复移动,z轴向为仿形臂相对于待洗车辆竖立的方向,x轴向为仿形臂相对于待洗车辆水平的方向。
10.清洁装置,位于仿形臂与待洗车辆之间,与移动装置可拆卸连接,用于跟随移动装置的移动以往复线扫的方式清洗待洗车辆上任意处的脏污。
11.与现有技术相比,本发明具有以下优点:行走装置沿其y轴自初始位置运动至待洗车辆副驾驶门附近后,首先,随着移动装置分别沿着z轴向、x轴向在仿形臂上的运动,清洁装置沿z轴向从待洗车辆的副驾驶门一侧开始,从副驾驶门上的车窗至副驾驶门下部先上后下进行连续性扫描式清洗,同时还沿x轴向在车顶上清洗脏污。然后行走装置继续沿着y轴向按照预设规定路线带动主体顺时针环绕车身一周运动,进而带动清洁装置环绕车身逐渐进行扫描式清洗,整个清洗过程实现了x轴向、y轴向以及z轴向三轴联动的清洗方式,完全能将清洁水喷出至待洗车辆全身及车轮胎,直接避免死角位置清洁不彻底及临界区区脏污未清除干净的导致车辆洗净效率低的问题。
12.进一步优选为,主体上分别设置有:控制模块,分别与清洁装置、行走装置控制连接。
13.服务器,其数据接收端通信连接有移动终端,数据输出端与控制模块数据连接,在网络环境下,用于接收移动终端发出的请求信息和确认信息,控制模块用于获取请求信息和确认信息,并输出控制信号至清洁装置,以控制清洁装置喷水清洗待洗车辆,控制模块用于向行走装置发出直行信号、转向信号,以控制行走装置直线行走或转向。
14.采用上述技术方案,服务器在网络环境下从移动终端获取请求信息和确认信息,并将请求信息传输至控制模块,控制模块按照预设程序运算得到控制信号,并向清洁装置发出信号,以控制清洁装置在仿形臂上进行往复运动,以实现在智能控制清洁装置清洁待洗车辆。当需要确定在待洗车辆的一侧移动时,通过控制模块向行走装置发出执行信号或转向信号,以控制行走装置进行直行或转向,进而实现环绕待洗车辆一周的运动。
15.进一步优选为,主体包括:支架,安装在行走装置的顶面上,其一侧壁与仿形臂固接。
16.第一底板,水平固接于支架上,用于承载服务器。
17.第二底板,与第一底板的位置相对,固接于支架上,用于承载控制模块。
18.第三底板,水平固接于支架的内壁上,均与第一底板、第二底板之间存在距离,用于承载水箱。
19.采用上述技术方案,通过支架、第一底板、第二底板以及第三底板构成完整的智能洗车结构,为智能洗车提供必要的硬件搭载平台。
20.进一步优选为,行走装置包括:底座。
21.动力驱动轮,设置在底座的一侧,与底座转动连接,用于通过底座垂直轴转动改变运动方向。
22.转向电机,可拆卸连接在底座上,并与动力驱动轮同侧。
23.转向主动轮,设置在底座的另一侧,并与转向电机的位置相对,与转向电机的工作端连接,转向电机用于驱动转向主动轮转动。
24.转向从动轮,转动连接在底座的另一侧,与转向主动轮啮合,其一侧壁与动力驱动轮连接,另一侧壁与主体的底面螺栓固定连接,转向主动轮通过与转向从动轮啮合转动带动底座和动力驱动轮垂直转动,进而改变主体的运动方向。
25.采用上述技术方案,转向电机转动后带动转向主动轮转动,转向主动轮转动一周的过程中,转向从动轮被转向主动轮带动转动预设弧度,转向从动轮带动动力驱动轮转向预设的角度,进而通过改变转向改变主体的运动方向,以实现从副驾驶门顺时针环绕车身一周的运动过程。
26.进一步优化为,仿形臂包括:上臂组件,位于与待洗车辆相对水平的上方位置,用于配合清洁装置清洗待洗车辆上表面上的脏污;下臂组件,位于与待洗车辆相对竖立的一侧,与上臂组件固接,用于配合清洁装置清洗待洗车辆的侧身上的脏污;轨道组件,分别铺设在上臂组件、下臂组件上,与上臂组件、下臂组件螺接,用于承载移动装置,以使移动装置在其上运动。
27.采用上述技术方案,在清洁过程中,通过上臂组件和下臂组件分别且同时在轨道组件上往复运动,实现对待洗车辆的上表面进行清洗的同时,又通过下臂组件从待洗车辆的侧身进行清洗,以此实现同时清洗待洗车辆不同的区域,节省清洗时间,提高清洗效率。
28.进一步优化为,上臂组件包括:横臂,位于待洗车辆的上方,与待洗车辆的顶面平行;弯臂,设置在横臂的端部,与横臂固接。移动装置用于在横臂与弯臂之间往复运动。
29.采用上述技术方案,以使清洁装置跟随移动装置的往复运动对待洗车辆的顶面或上表面进行清洗。
30.进一步优化为,下臂组件包括:斜臂,其一端与弯臂的另一端固接,与待洗车辆的上半身平行。
31.竖臂,其一端与斜臂的另一端固接,与待洗车辆的下半身平行。
32.采用上述技术方案,以使清洁装置跟随移动装置运动至斜臂上时,实现对车窗、前挡风玻璃以及后挡风玻璃进行清洗,待运动至竖臂上时可实现清洗车门、轮胎、车尾后保险杠、车头前保险杠以及较低位置处的脏污,进而实现连续扫描式清洗全车身的目的。
33.进一步优化为,轨道组件包括:链槽,分别设置在横臂、弯臂、斜臂以及竖臂上,并与横臂、弯臂、斜臂以及竖臂适配。
34.链条铺设在链槽上,其底面与链槽固接,表面与移动装置啮合,用于配合移动装置往复运动。
35.采用上述技术方案,进而带动清洁装置沿着链条反复清洁待洗车辆上的脏污。
36.进一步优化为,移动装置包括:滑板,其一侧壁与仿形臂接触,用于在仿形臂上往复运动。
37.第一滚轮,固定于滑板的一侧壁上,与仿形臂的上表面接触,用于在仿形臂的上表面上滑动。
38.第二滚轮,固接于滑板上,与第一滚轮同侧,与仿形臂的下表面接触,用于沿仿形臂的下表面往复滑动。
39.移动电机。
40.变速器,与移动电机的工作端连接,其底面与清洁装置螺接。
41.转轴,其中部与变速器连接,端部与仿形臂转动连接,变速器用于通过改变移动电机输出的转动方向而带动转轴在仿形臂上往复运动,进而带动清洁装置沿着仿形臂运动。
42.采用上述技术方案,以此实现移动电机间接驱动清洁装置在仿形臂往复上运动,实现往复清洗待洗车辆上脏污的目的。
43.进一步优化为,清洁装置包括:直线模组,安装在移动装置上,用于跟随移动装置在仿形臂的上部、下部往复运动。
44.滑槽,开设在直线模组中。
45.滑块,设置在直线模组的底面上,其侧壁与滑槽滑动连接。
46.线扫电机,安装在直线模组的端部,其工作端与滑块连接,用于驱动滑块在滑槽中进行直线式的往复运动。
47.喷水管,安装在直线模组外部,其端部穿过滑块,用于跟随滑块运动。
48.喷头,与喷水管螺接,用于将喷水管内的清洁水喷出至待洗车辆上,以清洗待洗车辆车身任意处的脏污。
49.采用上述技术方案,经过加压后的清洁水流经喷水管从喷头喷出至待洗车辆上,滑块被线扫电机驱动后在滑槽上往复运动,从而带动喷水管进行直线扫描式运动,喷头随同喷水管将清洁水喷射在待洗车辆上,以实现彻底清除车身任意处脏污的目的。
附图说明
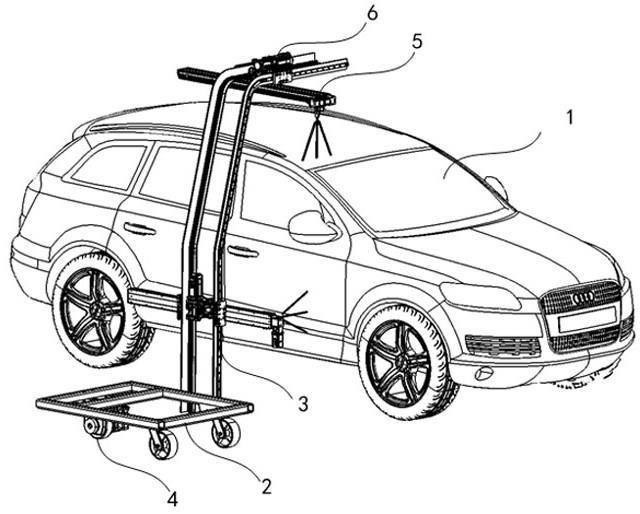
50.图1为本实施例的结构示意图。
51.图2为本实施例中行走装置和主体的结构示意图。
52.图3为本实施例中仿形臂的结构示意图。
53.图4为本实施例中上臂组件和下臂组件的结构示意图。
54.图5为本实施例中移动装置的结构示意图。
55.图6为本实施例的功能模块结构示意图。
56.图7为本实施例中清洁装置的结构示意图。
57.图8为本实施例中控制模块和服务器的结构示意图。
58.附图标记:1-待洗车辆;2-主体;20-支架;21-第一底板;22-第二底板;23-第三底板;3-仿形臂;31-上臂组件;311-横臂;312-弯臂;32-下臂组件;321-斜臂;322-竖臂;33-轨道组件;331-链槽;332-链条;4-行走装置;40-底座;41-动力驱动轮;42-转向电机;43-转向主动轮;44-转向从动轮;5-清洁装置;51-直线模组;52-喷水管;53-喷头;54-线扫电机;55-滑块;56-滑槽;6-移动装置;61-第一滚轮;62-固定件;63-滑板;64-第二滚轮;65-移动电机;66-变速器;67-转轴;7-控制模块;8-服务器。
具体实施方式
59.现有技术中,申请公布号为cn202111233406.0的中国专利申请文件公开了一种智能化自动洗车机器人,该方案提供的一种智能化自动洗车机器人,包括补给连接座和洗车机器人本体。所述洗车机器人本体包括基座、移动机构、锂电池、自动控制模块、第一水箱、第一清洁液贮存箱、喷水管、清洁液喷管、支撑架、第一液泵和第二液泵和热风机。产生的技术效果是通过洗车机器人本体采用无接触的洗车方案,通过设计l形支撑架连接喷水管和喷射管,通过洗车机器人本体环绕车辆移动实现清洗全覆盖,洗车全程不需要通过毛刷辊接触车体,一方面降低了设备成本和设备维护成本,省去了毛刷辊的定期清洗、保养和更换的步骤,不需要控制毛刷辊转动的复杂的机械结构,使用寿命更高,还可避免毛刷辊上粘附的泥沙刮伤车漆的风险,从而节约设备成本的同时,实现高效高质量的洗车。
60.我们可以得出该技术是通过设计l形支撑架连接喷水管和喷射管,实质是在l形支撑架上设置了多个喷水管和喷射管,通过不同位置的喷水管和喷射管向车辆的不同位置喷水并依靠水的冲刷作用冲走脏污而实现洗车的目的,但是每个喷水管和喷射管只能向各自固定对应的区域喷水,是一种在移动清洗过程中进行单一方向的清洗方式,并且从附图中可得知,相邻喷水管之间存在一定的距离,这样在喷水的过程中,直接与喷水管、喷射管对应的区域被清洗的很干净,但是边缘区域的脏污不能被彻底冲洗,尤其遇到脏污很多并且处于相邻两个喷水管之间临界区域时或者车尾死角位置时,上述技术单一方向的清洗方式就不能达到彻底清洗脏污的目的,必要的时候需要人工清洁未清洗掉的脏污,因此车辆洗净效率低,智能自动化程度低。
61.针对上述技术问题,本发明进行了以下设计构想,打破上述单一固定的洗车方式,向附着在车身任意处的脏污都能喷洒加压后的清洁水,通过较高压力的清洁水冲刷脏污,实现对待洗车辆进行彻底清洁,提高洗净效率。
62.基于上述设计与构想,本技术结合以下附图1-图8对本发明作进一步详细介绍。
63.一种智能洗车机器人,如图1所示,用于以三轴联动的方式对待洗车辆1上的脏污进行移动线扫式清洗,包括:主体2,位于待洗车辆1的副驾驶门的一侧,与待洗车辆1之间存在预设距离,预设距离是主体2与待洗车辆1之间预设的固定的安全距离,以防止在清洗过程中主体2触碰待洗车辆1。
64.行走装置4,设置在主体2的底面上,与主体2的底面可拆卸连接,用于按照预设路径自动带动主体2从初始位置沿x轴向行驶至副驾驶门的一侧,其中x轴向为行走装置前进的方向。
65.仿形臂3,其一端固定于主体2的一侧壁上,并朝向待洗车辆1,另一端位于待洗车辆1的上方位置。行走装置4用于沿x轴方向带动主体2从副驾驶门的一侧顺时针环绕待洗车辆1一周运动,进而带动仿形臂3环绕主体2运动。
66.移动装置6,分别设置在仿形臂3的上部、下部,与仿形臂3滚动连接,移动装置6用于分别沿y轴向、z轴向在从仿形臂3上往复移动,y轴向为仿形臂相对于待洗车辆1竖立的方向,z轴向为仿形臂3相对于待洗车辆1水平的方向。
67.清洁装置5,位于仿形臂3与待洗车辆1之间,与移动装置6可拆卸连接,用于跟随移动装置6的移动以往复线扫的方式清洗待洗车辆1上任意处的脏污。
68.行走装置4沿其y轴向自初始位置动运动至待洗车辆1副驾驶门附近后,首先,随着移动装置6分别沿着z轴向、x轴向在仿形臂3上的运动,清洁装置5沿从z轴向从待洗车辆1的副驾驶门一侧开始,从副驾驶门上的车窗至副驾驶门下部先下后上进行连续性扫描式清洗,同时还沿x轴向在车顶上清洗脏污。然后行走装置4继续沿着y轴向按照预设规定路线带动主体2顺时针环绕车身一周运动,进而带动清洁装置5环绕车身逐渐进行扫描式清洗,整个清洗过程实现了x轴向、y轴向以及z轴向三轴联动的清洗方式,完全能将清洁水喷出至待洗车辆1全身及车轮胎轮毂,直接避免死角位置清洁不彻底及临界区脏污未清除干净的导致车辆洗净效率低的问题。
69.具体的,如图6和图8所示,本实施例中的主体2上分别设置有:控制模块7,分别与清洁装置5、行走装置4控制连接。控制模块7选用是将具有控制功能的控制器件应用到本领域中,如应用于中国专利申请号为cn202020238746.7,公开的一种三支点多向行驶叉车的转向控制装置,能够实现控制直行和转向的目的。
70.服务器8,其数据接收端通信连接有移动终端,数据输出端与控制模块7数据连接,在网络环境下,用于接收移动终端发出的请求信息和确认信息,控制模块7获取请求信息和确认信息,并输出控制信号至清洁装置5,以控制清洁装置5喷水清洗待洗车辆1,控制模块7用于向行走装置4发出直行信号、转向信号,以控制行走装置4直线行走或转向。其中,移动终端可以是手机、平板电脑或能够移动中任意一种能够与服务器8建立通讯网络的终端设备即可。移动终端通过应用程序可以存储预设距离和预设的环绕路线,环绕路线是按照不同车型的待洗车辆预设在移动终端的环绕车身一周的路线,适用于货车和客车中任意型号的待洗车辆1。本技术中的应用软件为现有已开发的应用软件,只要能实现本技术的功能需要即可,所以对其应用范围不做限制。
71.服务器8在网络环境下从移动终端获取请求信息和确认信息,并将请求信息传输至控制模块7,控制模块7按照预设程序运算得到控制信号,并向清洁装置5发出信号,以控制清洁装置5在仿形臂3上进行往复运动,以实现在智能控制清洁装置5清洁待洗车辆1。当需要确定在待洗车辆1的一侧移动时,通过控制模块7向行走装置4发出执行信号或转向信号,以控制行走装置4进行直行或转向,进而实现环绕待洗车辆1一周的运动。需说明的是,本技术中的网络环境为无线局域网、移动数据网、蓝牙等通讯网络均可,只要能实现服务器8与移动终端直线数据信息的传输即可,对于网络类型不做限制。
72.具体的,如图1和图2所示,本实施例中的主体2包括:支架20,安装在行走装置4的顶面上,其一侧壁与仿形臂3固接。支架20选用多根方形钢管首尾焊接而成的支架20,在支架20的外部还焊接有方形钢管。
73.第一底板21,水平固接于支架20上,第一底板21的表面与支架20的底面焊接,用于承载服务器8。
74.第二底板22,与第一底板21的位置相对,固接于支架20上,具体是第二底板22焊的表面与支架20的底面焊接,用于承载控制模块7。
75.第三底板23,水平固接于支架20的内壁上,均与第一底板21、第二底板22之间存在距离,第三底板23的形状为直角三角形,其直角边焊接在支架20的内壁上,用于承载水箱,具体是水箱可以放置或安装在第三底板23上,本实施例中仅示意了第三底板23与水箱之间的位置和连接方式,虽然未示意出水箱的具体安装方式,但是不影响第三底板23和支架20
一起承载水箱的作用。
76.通过支架20、第一底板21、第二底板22以及第三底板23构成完整的智能洗车结构,为智能洗车提供必要的硬件搭载平台。
77.具体的,如图1和图2所示,本实施例中的行走装置4包括:底座40,位于第一底板21和第二底板22的下方位置处。
78.动力驱动轮41,设置在底座40的一侧,与底座40转动连接,用于通过底座40垂直轴转动改变运动方向。
79.转向电机42,可拆卸连接在底座40上,并与动力驱动轮41同侧。
80.转向主动轮43,设置在底座40的另一侧,并与转向电机42的位置相对,位于底座40与第二底板22之间,与转向电机42的工作端连接,转向电机42用于驱动转向主动轮43相对底座40转动。
81.转向从动轮44,转动连接在底座40的另一侧,与转向主动轮43啮合,位于底座40与第一底板21之间,其一侧壁与动力驱动轮41连接,另一侧壁与主体2的螺栓固定连接,具体是与第一底板21固定连接,转向主动轮43用于通过转动带动转向从动轮44通过与转向从动轮44啮合转动带动底座40和动力驱动轮41垂直轴转动,进而改变主体2的运动方向,进而改变主体2的运动方向。
82.在一实施例中,行走装置4选用agv驱动轮,agv驱动轮具有自动引导的功能,能够沿预设的路径行驶至待洗车辆1的停放区域,并且能够根据预设路径实现环绕车身运动,进而带动主体2、仿形臂3以及清洁装置5实现智能洗车的目的,具有智能化程度高的特点。
83.如图1和图2所示,以动力驱动轮41朝向待洗车辆1的尾部的方向为正前方,动力驱动轮41在底座40的引导下进行直线向前运动。转向电机42转动后带动转向主动轮43转动,转向主动轮43转动一周的过程中,转向从动轮44被转向主动轮43带动转动预设弧度,转向从动轮44带动动力驱动轮41转向预设的角度,进而通过改变转向改变主体2的运动方向,以实现从副驾驶门顺时针环绕车身一周的运动过程。转向电机42选用直流伺服电机,型号不受限制。
84.具体的,本实施例中的转向主动轮43的直径小于转向从动轮44的直径,实现转向从动轮44的转速小于转向主动轮43的转速,最终实现改变主体2转向的目的。
85.具体的,如图3和图4所示,本实施例中的仿形臂3包括:上臂组件31,位于与待洗车辆1相对水平的上方位置,其运动方向为x轴向,用于配合清洁装置5清洗待洗车辆1上表面上的脏污;下臂组件32,位于与待洗车辆1相对竖立的一侧,与上臂组件31固接,用于配合清洁装置5清洗待洗车辆1的侧身上的脏污;轨道组件33,分别铺设在上臂组件31、下臂组件32上,与上臂组件31、下臂组件32螺接,用于承载移动装置,以使移动装置6在其上运动。
86.在清洁过程中,通过上臂组件31和下臂组件32分别且同时在轨道组件上往复运动,实现对待洗车辆1的上表面进行清洗的同时,又通过下臂组件32从待洗车辆的侧身进行清洗,以此实现同时清洗待洗车辆不同的区域,节省清洗时间,提高清洗效率。
87.具体的,如图1、图3以及图4所示,本实施例中的上臂组件31包括:横臂311,位于待洗车辆1的上方,与待洗车辆1的顶面平行;
弯臂312,设置在横臂311的端部,与横臂311固接。移动装置6用于在横臂311与弯臂312之间往复运动,以使清洁装置5跟随移动装置6的往复运动对待洗车辆1的顶面或上表面进行清洗。
88.下臂组件32包括:斜臂321,其一端与弯臂312的另一端固接,与待洗车辆1的上半身平行。
89.竖臂322,其一端与斜臂312的另一端固接,与待洗车辆1的下半身平行。以使清洁装置5跟随移动装置6运动至斜臂321上时,实现对车窗、前挡风玻璃以及后挡风玻璃进行清洗,待运动至竖臂322上时可实现清洗车门、轮胎、车尾后保险杠、车头前保险杠以及较低位置处的脏污,进而实现连续扫描式清洗全车身的目的。
90.弯臂312是为了能使清洁装置5顺利无卡顿的从横臂311运动至斜臂321上。其中弯臂312占所在虚拟圆的1/6-1/5圆弧,斜臂321与竖臂322之间的夹角范围为120
°‑
180
°
,处于该范围的斜臂321与竖臂322不会碰触到车身,确保待洗车辆1在清洗过程中的安全。
91.如图3和图5所示,轨道组件33包括:链槽331,分别设置在横臂311、弯臂312、斜臂321以及竖臂322上,并与横臂311、弯臂312、斜臂321以及竖臂322适配。
92.链条332铺设在链槽331上,其底面与链槽331固接,表面与移动装置6啮合,用于配合移动装置6往复运动,进而带动清洁装置5沿着链,332反复清洁待洗车辆上的脏污。
93.如图1和图5所示,移动装置6包括:滑板63,其一侧壁与仿形臂3接触,用于在仿形臂3上往复运动。具体是滑板63在运动过程中,先后与横臂311、弯臂312、斜臂321以及竖臂322接触。
94.第一滚轮61,通过固定件62固接在滑板63的一侧壁上,与仿形臂3的上表面接触,用于在仿形臂3的上表面上滑动。
95.第二滚轮64,固接于滑板63上,与第一滚轮61同侧,与仿形臂3的下表面接触,用于沿仿形臂3的下表面往复滑动。
96.移动电机65。
97.变速器66,与移动电机65的工作端连接,其底面与清洁装置5螺接。
98.转轴67,其中部与变速器连接,端部与仿形臂转动连接,变速器用于通过改变移动电机65输出的转动方向而带动转轴67在仿形臂3的横臂311、弯臂312、斜臂321以及竖臂322上往复运动,进而带动清洁装置5沿着仿形臂运动,以此实现移动电机65间接驱动清洁装置5在仿形臂3往复上运动,实现往复清洗待洗车辆1上脏污的目的。
99.具体的,如图1和图7所示,本实施例中的清洁装置5包括:直线模组51,安装在移动装置6的变速器66的底面上,用于跟随移变速器66在仿形臂3的上部、下部往复运动。
100.滑槽56,开设在直线模组51中。
101.滑块55,设置在直线模组51的底面上,其侧壁与滑槽56滑动连接。
102.线扫电机54,安装在直线模组51的端部,其工作端与滑块55连接,用于驱动滑块55在滑槽56中进行直线式的往复运动。
103.喷水管52,安装在直线模组51外部,其端部穿过滑块55,用于跟随滑块55运动。
104.喷头53,与喷水管52螺接,用于将喷水管52内的清洁水喷出至待洗车辆1上,以清
洗待洗车辆1车身任意处的脏污。
105.经过加压后的清洁水流经喷水管52从喷头53喷出至待洗车辆1上,直线模组51随着变速器66在链条332上运动,从而带动喷水管52进行扫描式洗车,实现彻底清除车身任意处脏污的目的。
106.洗车过程:请结合图1-图8,以机器人在定置停放位置为初始位置,以下对待洗车辆1的清洗过程进行详细描述,具体内容如下:驾驶员通过移动终端输入请求信息,在网络环境下,服务器8获取移动终端发出的请求信息,并将请求信息传输至行走装置4的转向电机42,转向电机42根据请求信息按照预设路径沿y轴向自动运动至待洗车辆1副驾驶门的一侧,待在移动终端上输入确认信息后,服务器8获取确认信息并将确认信息传输至控制模块7,控制模块7读取信息后向清洁装置5输出控制信号,直线模组51接收控制信号后按照预设运动路径在仿形臂3的链条332上通过以下两条轨迹同时进行洗车,具体如下:x轴向轨迹:线扫电机54驱动直线模组51沿x轴向从横臂311运动至弯臂312,再从弯臂312返回至横臂311运动,期间清洁水流经喷水管52从喷头53中喷出,分别喷洒在待洗车辆1的车顶、车窗及玻璃上。
107.z轴向轨迹:线扫电机54驱动直线模组51沿z轴向从斜臂321与弯臂312的连接处开始运动至竖臂322的下端,再原路返回,期间清洁水分别喷洒在车窗、玻璃副驾驶门以及轮胎上,以此清洁水可以自上而下冲刷待洗车辆1上的脏污,节省了清洁水。
108.由于x轴向轨迹实际上是将清洁水从车顶逐渐向车身其他部位喷洒,清洁水会顺着车顶逐渐流向车身其他部位,当主要清洗车顶时,清洁水还能在一定程度上预先冲洗其他区域,当在清洗其他区域时,会更容易进行清洗,而且会用到较少的清洁水,所以,当环绕车身一周洗车时,第一种运动路径会更省水,而且洗净率更高。
109.当完成一遍副驾驶门及对应的车顶区域的清洗时,直线模组51向控制模块7发出第一反馈信息,控制模块7接收第一反馈信息并发出直行信号至行走装置4的转向电机42,转向电机42按照预设路径沿y轴向运动至主驾驶后门的一侧,直线模组51分别按照第一种运动路径或第二中运动路径进行清洗。
110.当完成一遍主驾驶后门及对应车顶的清洗时,直线模组51向控制模块7发出第二反馈信息,控制模块7接收第二反馈信息并发出转向信号至转向电机42,转向电机42工作后带动转向主动轮43转动,以使转向主动轮43转动带动转向从动轮44转动而改变动力驱动轮41的转向产生转向角度,进而改变主体2的运动方向,将主体2移动至车尾的一侧,两组直线模组51分别沿x轴向轨迹和z轴向轨迹同时清洗待洗车辆1的尾部及对应的车顶区域。以此类推,完成环绕待洗车辆1一周的清洗后,行走装置4按照预设路径返回至固定停放位置。
111.综上所述,本发明的洗车方式是行走装置4沿其y轴自初始位置运动至待洗车辆1副驾驶门附近后,直线模组51跟随移动装置的转轴67分别沿着z轴向、x轴向在仿形臂3上的运动,沿z轴向从待洗车辆1的副驾驶门一侧开始,从副驾驶门上的车窗至副驾驶门下部先下后上进行连续性扫描式清洗,同时还沿x轴向在车顶上清洗脏污。然后行走装置4带动主体2继续沿着y轴向按照预设规定路线带动主体2顺时针环绕车身一周运动,进而带动清洁装置5环绕车身逐渐进行扫描式清洗,整个清洗过程实现了x轴向、y轴向以及z轴向三轴联
动的清洗方式,完全能将清洁水喷出至待洗车辆1全身及车轮胎轮毂,直接避免死角位置清洁不彻底及临界区脏污未清除干净的导致车辆洗净效率低的问题。
112.本具体实施例仅仅是对发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的保护范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1