xEV车辆的防抖动控制方法和系统与流程
本公开涉及一种xev车辆的防抖动(anti-jerk)控制方法和系统,更具体地,涉及一种xev车辆的防抖动控制方法和系统,该方法和系统可以在防抖动控制时考虑在背隙(backlash)区域产生的冲击来校正模型速度,从而有效地减小振动并提高驾驶性能。
背景技术:
1、如今,由于环境法规,环保型车辆正在全球范围内积极推广。
2、环保型车辆的示例包括混合动力电动车辆(hev)、电动车辆(ev)、燃料电池电动车辆(fcev)等。
3、诸如电动车辆的利用马达作为动力的车辆通过对马达的防抖动控制减小振动。此时,最重要的是精确地提取振动分量。传统上利用马达速度和模型速度之间的差值来提取振动分量,然后使其通过高通滤波器来去除误差分量。然而,当用传统的方法进行控制时,由于车辆的驱动/再生切换导致的驱动系统背隙冲击而反而会出现振动加剧的问题。也就是说,当驱动马达的方向切换(+驱动扭矩→-再生扭矩或-再生扭矩→+驱动扭矩)时,发生背隙冲击,因此不能精确地提取振动分量。这是因为由背隙冲击引起的马达速度的大的变化被错误地提取为振动分量。
4、图1是用于说明现有技术的防抖动控制方法的示图。
5、参照图1,当不产生振动时,在步骤s11中检测实际马达速度并且在步骤s12中检测模型速度,这可以被视为正确答案,并且在步骤s13中提取实际马达速度和模型速度之间的差值作为振动分量。确定模型速度的方法有多种,但几乎不可能精确地确定,因此不可避免地会产生误差分量。出于这个原因,在步骤s14中使用高通滤波器,在步骤s15中使用相位延迟,在步骤s16中使用增益,并且在步骤s17中使用防抖动扭矩,以去除误差分量。
6、然而,在现有技术文献中,在由于驱动/再生切换而通过驱动系统背隙区域的情况下,由背隙冲击而改变的马达速度被提取为振动分量,从而振动分量被错误地提取,使减振性能恶化,或者反而诱发振动。
7、本公开的背景技术中包括的信息只是为了增强对本公开的一般背景的理解,并且不可被视为对这些信息形成本领域技术人员已知的现有技术的承认或任何形式的暗示。
技术实现思路
1、本公开的各方面旨在提供一种xev车辆的防抖动控制方法和系统,该方法和系统基本上消除了由于现有技术的限制和缺点而导致的一个或多个问题。
2、本公开的目的是提供一种xev车辆的防抖动控制方法和系统,该方法和系统可以在防抖动控制时考虑在背隙区域产生的冲击来校正模型速度,从而有效地减小振动并提高驾驶性能。
3、本公开的另外的优点、目的和特征将部分地在下面的描述中阐述,并且部分地对于本领域技术人员在检查以下内容后将变得显而易见或可以从本公开的实践中获知。本公开的目的和其它优点可以通过撰写的说明书及其权利要求书以及附图中特别指出的结构来实现和获得。
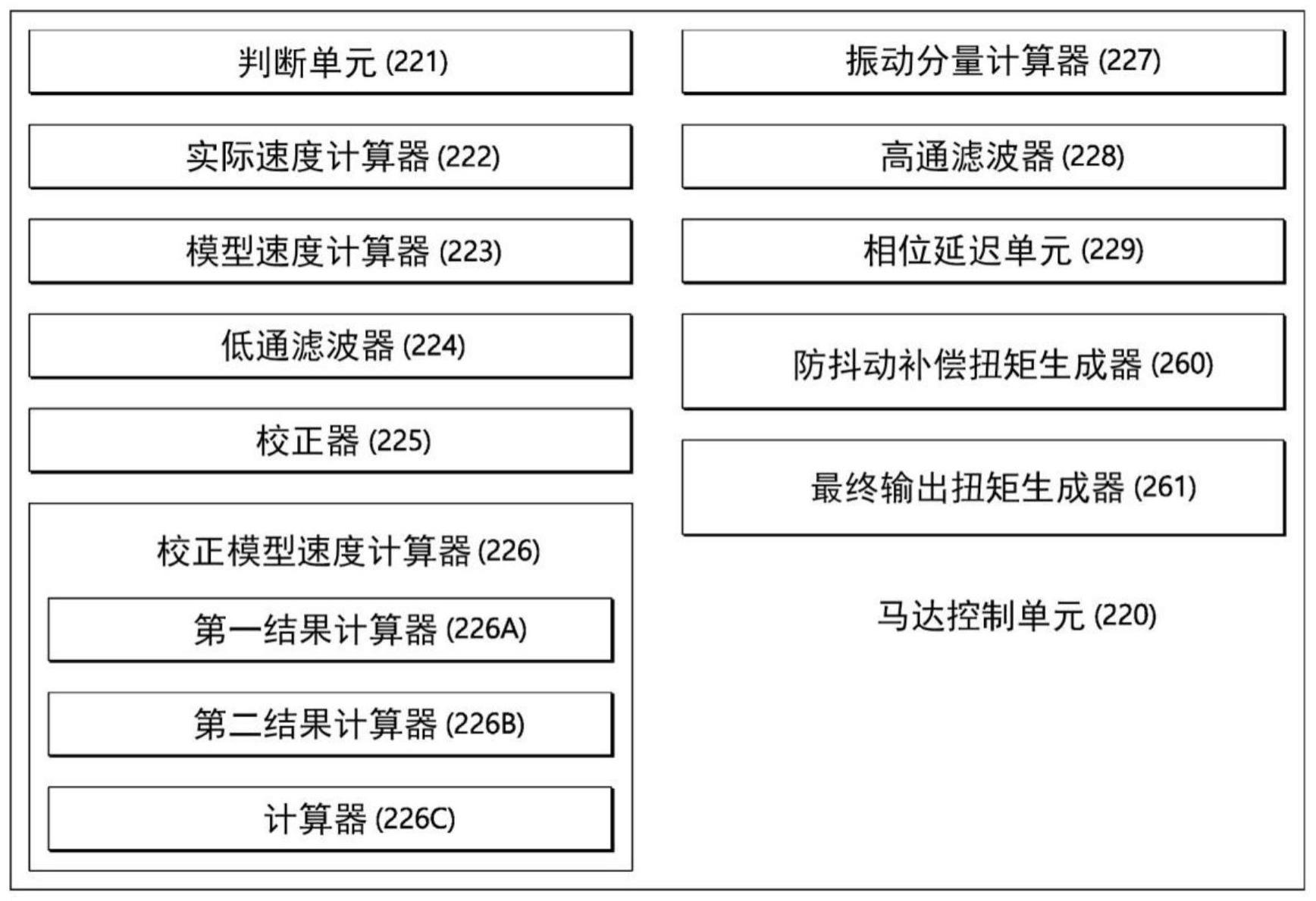
4、为了实现这些目的和其它优点并根据本公开,如本文所体现和广泛描述的,提供一种利用马达的动力的xev车辆的防抖动控制方法,该方法包括:判断区域是否为马达的输出扭矩的方向由于驱动/再生切换而切换的背隙区域;确定马达的模型速度和马达的实际马达速度;当作为判断的结果,判断区域为背隙区域时,对冲击分量进行低通滤波,以从确定的实际马达速度中去除包括在冲击分量中的误差分量;通过监测输出扭矩来确定校正因子;通过汇总低通滤波后的校正马达速度、校正因子、模型速度和实际马达速度,来确定反映背隙区域中的冲击的校正模型速度;基于确定的校正模型速度和实际马达速度之间的偏差来提取振动分量;对振动分量进行高通滤波,以去除包括在振动分量中的误差分量;将滤波后的振动分量相位延迟设定的时间,以补偿在振动分量被高通滤波时发生的相位先行;以及通过将设定的增益值应用于应用相位延迟设定的时间的滤波后的振动分量来生成防抖动补偿扭矩。
5、此外,提供一种利用马达的动力的xev车辆的防抖动控制系统,该系统包括:电池,被配置为向马达提供驱动电力;电池控制单元(bcu),被配置为管理和控制电池的充电和放电;以及马达控制单元(mcu),被配置为控制马达的驱动,其中,马达控制单元可以执行用于执行xev车辆的防抖动控制方法的命令。
6、本公开的方法和装置具有其它特征和优点,这些特征和优点将从一起用于解释本公开的某些原理的并入本文的附图和以下具体实施方式中变得明显或在附图和具体实施方式中更详细地阐述。
技术特征:
1.一种利用马达的动力的xev车辆的防抖动控制方法,所述方法包括:
2.根据权利要求1所述的方法,其中,
3.根据权利要求1所述的方法,其中,
4.根据权利要求3所述的方法,其中,
5.根据权利要求4所述的方法,其中,
6.根据权利要求1所述的方法,进一步包括:
7.根据权利要求1所述的方法,其中,
8.根据权利要求1所述的方法,其中,
9.一种非暂时性计算机可读记录介质,记录用于执行根据权利要求1所述的xev车辆的防抖动控制方法的程序。
10.一种利用马达的动力的xev车辆的防抖动控制系统,所述系统包括:
11.根据权利要求10所述的系统,其中,
12.根据权利要求11所述的系统,其中,
13.根据权利要求11所述的系统,其中,
14.根据权利要求13所述的系统,其中,
15.根据权利要求14所述的系统,其中,
16.根据权利要求11所述的系统,进一步包括:
17.根据权利要求11所述的系统,其中,
18.根据权利要求11所述的系统,其中,
技术总结
本公开提供一种利用马达的动力的xEV车辆的防抖动控制方法和系统,该系统包括:电池,被配置为向马达提供驱动电力;电池控制单元(BCU),被配置为管理和控制电池的充电和放电;以及马达控制单元(MCU),被配置为控制马达的驱动,其中,马达控制单元被配置为执行用于执行xEV车辆的防抖动控制方法的命令。
技术研发人员:曺宇喆
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!