一种自动驾驶汽车确定驾驶策略的方法和装置
本文涉及车辆自动驾驶,尤指一种自动驾驶汽车确定驾驶策略的方法和装置。
背景技术:
1、防御性驾驶是指车辆在行车过程中,能够预见由其他车辆、周边环境、当前路段车况等引发的危险,并能采取响应的驾驶决策措施来预防事故的发生以及进行路径的规划。防御性驾驶包含在自动驾驶决策技术之内,其特征应使车辆拥有预知潜在事故的能力并作出相应的决策。
2、一些自动驾驶决策技术包括使用遗传算法,蚁群算法,id3决策树,神经网络,人工势场法等方法。其中,神经网络方法需要进行大量的数据训练,然而,常规数据集难以满足庞大的环境复杂度,因此使用神经网络方法难以涵盖全部的车况。人工势场法已经应用于低级别自动驾驶辅助上,但是它仍然存在局部最优、碰撞及达不到目标点的问题。在整个自动驾驶决策过程中,存在大量的未知行为决策影响因素,他们种类繁多且无主次,从而导致决策信息获取和表示不充分。以上自动驾驶决策方法无法对周边环境的复杂程度进行评估,亟待需要一种能够基于空间交互熵与空间类斥力确定驾驶策略的方法。
技术实现思路
1、本技术提供了一种自动驾驶汽车确定驾驶策略的方法和装置,在车辆的紧急状态下,可以通过空间交互熵对周边环境的危险程度进行评估,从而执行较优的驾驶策略,能够提升车辆避撞能力以及自动驾驶环境下的综合场景适应能力。
2、本技术提供了一种自动驾驶汽车确定驾驶策略的方法,所述方法包括:
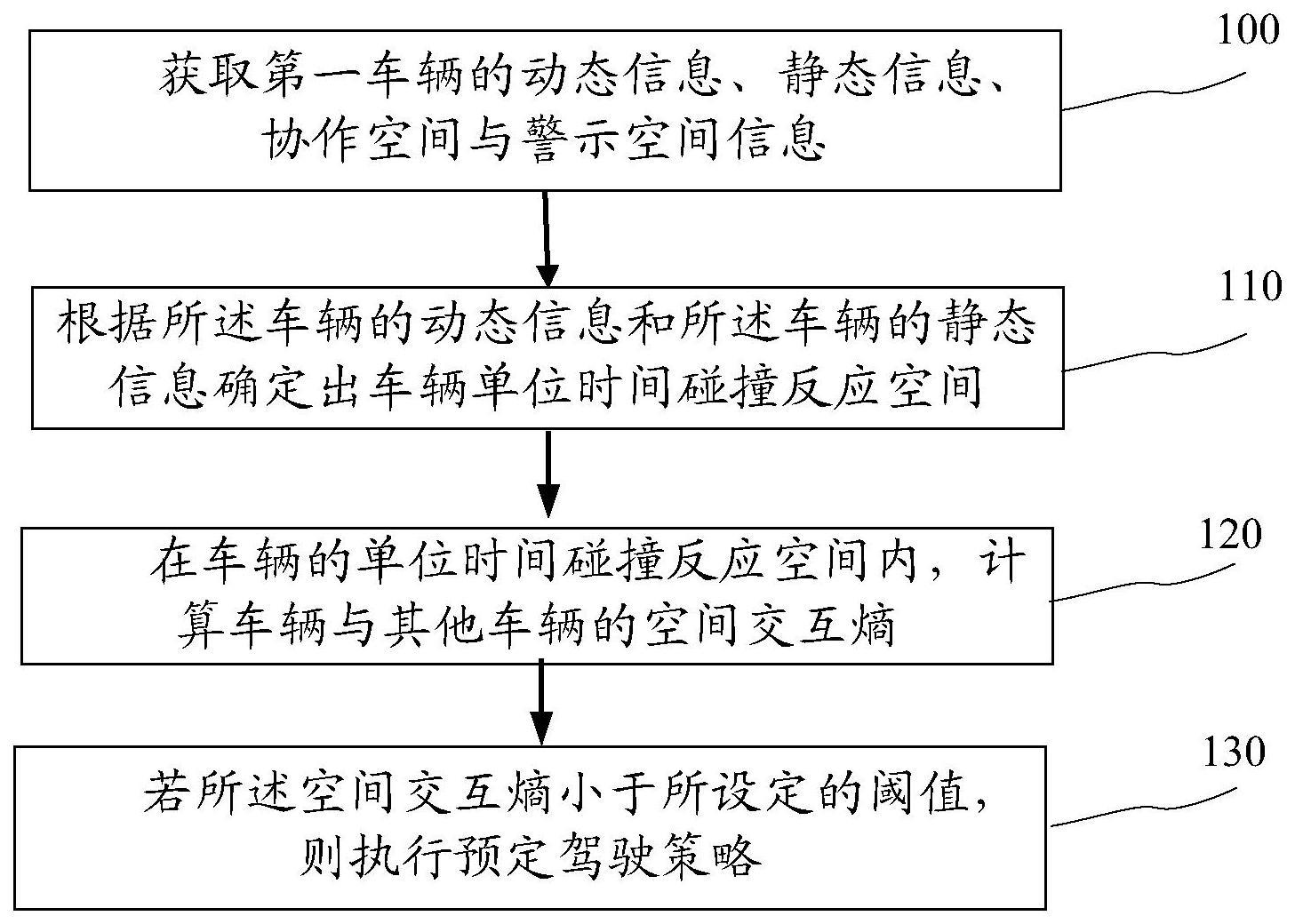
3、获取第一车辆的动态信息、静态信息、协作空间与警示空间信息;
4、根据所述车辆的动态信息和所述车辆的静态信息确定出车辆单位时间碰撞反应空间;
5、在所述车辆的单位时间碰撞反应空间内,计算所述第一车辆与其他车辆的空间交互熵;
6、若所述空间交互熵小于所设定的阈值,则执行预定驾驶策略;
7、所述预定驾驶策略是根据所述协作空间类斥力与所述警示空间类斥力的矢量和所确定的;
8、其中,所述协作空间为第一车辆与其他车辆相互协作完成避碰所需的最小空间区域;所述警示空间为第一车辆传感器所能感知到的最大空间区域。
9、一种示例性的实施例中,所述静态信息包括:获取协作空间与警示空间内的环境信息,并计算静态环境反应空间,确定位于静态环境反应空间内或对车辆避碰操作有影响的静态障碍物位置信息;
10、所述动态信息包括:车辆速度、车辆瞬时加速度、车辆离心加速度、车辆与环境地面的附着系数、车辆所在地区的重力加速度。
11、一种示例性的实施例中,所述车辆的单位时间碰撞反应空间为:第一曲线、第二曲线、第三曲线、第四直线构成的二维区域;
12、其中,第一曲线、第二曲线分别是最大转向轨迹的圆弧曲线;
13、第三曲线的形状为椭圆,该椭圆的顶点分别为所述第一曲线、所述第二曲线的转向顶点以及该第一车辆沿直线最大减速度到停止的距离点,该椭圆的长轴为第一曲线、第二曲线的转向顶点的一半,该椭圆的短轴为所述距离点到所述第一曲线、第二曲线的转向顶点的距离;
14、第四直线是车辆离心加速度为0时,以最大减速度行驶的轨迹。
15、一种示例性的实施例中,所述第一曲线、第二曲线的确定方法为:
16、根据车辆的速度、车辆瞬时加速度、车辆与环境地面的附着系数和车辆所在地区的重力加速度,利用预置的计算公式确定该车辆最大转向轨迹的圆弧曲率半径和弧长;
17、其中,所述预置的计算公式为:
18、
19、上述公式中,v为车辆速度,ar为车辆瞬时加速度,μ为车辆与环境地面的附着系数,g为车辆所在地区的重力加速度,r为圆弧曲率半径,s为圆弧的弧长。
20、一种示例性的实施例中,所述第三曲线的确定方法为:
21、根据第一曲线、第二曲线的转向顶点和第一车辆沿直线最大减速度到停止的距离点所确定;
22、其中,第一车辆沿直线最大减速度到停止的距离点x为:
23、
24、上述公式中,x为车辆沿直线最大减速度到停止的距离,ar为车辆瞬时加速度,t为第一车辆沿直线,采用最大减速度,从开始减速到停止行驶的时间长度,t为第一车辆行驶的时间。
25、一种示例性的实施例中,所述第四直线的确定方法为:
26、获取车辆从接收到周围信息至开始执行避碰操作的决策响应时间;
27、第四直线集是信号响应空间,是第一、第二曲线起始点以及第一车辆的左、右前侧顶点所围成的区域,在所述决策响应时间内第一车辆的位移曲线。
28、一种示例性的实施例中,所述车辆间的空间交互熵包括:横向空间交互熵和纵向空间交互熵;
29、所述在所述车辆单位时间碰撞反应空间内,计算所述车辆与其他车辆的空间交互熵,包括:
30、基于网格划分将车辆单位时间碰撞反应空间划分为j个2d子区域;计算单位时间碰撞反应空间内的第二车辆反应空间与第一车辆的反应空间重合区域内每个子区域的交集面积与子区域原始面积的比值p(ψj);
31、计算单位时间碰撞反应空间内的第二车辆反应空间与第一车辆的反应空间重合区域内每个子区域的空余(未产生交集)面积与子区域原始面积的比值p(υj);
32、根据所述比值分别计算车辆的横向空间交互熵和纵向空间交互熵;
33、其中,所述其他车辆包括多个第二车辆。
34、一种示例性的实施例中,所述纵向空间交互熵的计算式为:
35、
36、
37、所述横向空间交互熵的计算式为:
38、
39、其中,最小值为-1,ln(p(ψj))的最小值为-1,k为警示空间内第二车辆的总数量,j为单位时间碰撞反应空间被划分的2d区域数量,m、n为空间交互熵计算起始值,ε为第一车辆单位时间碰撞反应空间的面积。
40、一种示例性的实施例中,所述类斥力分别包括纵向类斥力与横向类斥力;
41、其中,所述纵向类斥力fz为:
42、
43、所述横向类斥力fh为:
44、
45、上述公式中,fz为纵向类斥力,fh为横向类斥力,wj为警示空间的类斥力权重,wx为协作空间的类斥力权重,vh为与车道线垂直方向(横向)的速度分量,vz为与车道线平行方向(纵向)的速度分量,分别为第二车辆的横向与纵向速度分量,d表示车辆间的距离,k为警示空间内第二车辆的总数量。
46、一种示例性的实施例中,所述预定驾驶策略包括调整车辆方向盘转角或调整车辆加速度;
47、其中,
48、所述方向盘转角为:θ=μfh;
49、所述加速度为:a=δfz;
50、上述公式中,θ为方向盘转角,a为车辆加速度,μ与δ均为预先标定的值。
51、本技术还提供了一种基于空间交互熵与空间类斥力确定驾驶策略的装置,所述装置包括:存储器和处理器,所述存储器用于保存进行自动驾驶汽车确定驾驶策略的程序,所述处理器用于读取执行所述用于进行自动驾驶汽车确定驾驶策略的程序,执行上述实施例中任一项所述的方法。
52、与相关技术相比,本技术提供一种自动驾驶汽车确定驾驶策略的方法和装置,所述方法包括:获取第一车辆的动态信息、静态信息、空间信息;根据所述车辆的动态信息和所述车辆的静态信息确定出车辆单位时间碰撞反应空间;在所述车辆的单位时间碰撞反应空间内,计算所述第一车辆与其他车辆的空间交互熵;若所述空间交互熵小于所设定的阈值,则执行预定驾驶策略;其中,所述预定驾驶策略是根据所述空间信息确定的。通过本发明的技术方案,在车辆的紧急状态下,采用该方法可以通过空间交互熵对周边环境的危险程度进行评估,从而执行较优的驾驶策略,能够提升车辆避撞能力以及自动驾驶环境下的综合场景适应能力。
53、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!