车速确定方法、装置、设备、介质及产品与流程
本技术属于汽车,尤其涉及一种车速确定方法、装置、设备、介质及产品。
背景技术:
1、在汽车技术领域,对于自动驾驶行车预测规划等众多控制算法而言需要使用的一个重要信号就是本车车速,准确地确定出车速能够极大地帮助这些控制算法提升其准确性、安全性和简洁性。
2、目前现有的车速确定方法主要是依据车辆四个车轮分别对应的轮速的平均值来确定,如此,在极低速、转弯、大加速、大减速等多种情况下采用现有的车速确定方法确定得到的车速失真较为严重,准确性较低。
技术实现思路
1、本技术实施例提供一种车速确定方法、装置、设备、介质及产品,能够降低车速的失真度,提高准确性。
2、第一方面,本技术实施例提供一种车速确定方法,该方法包括:
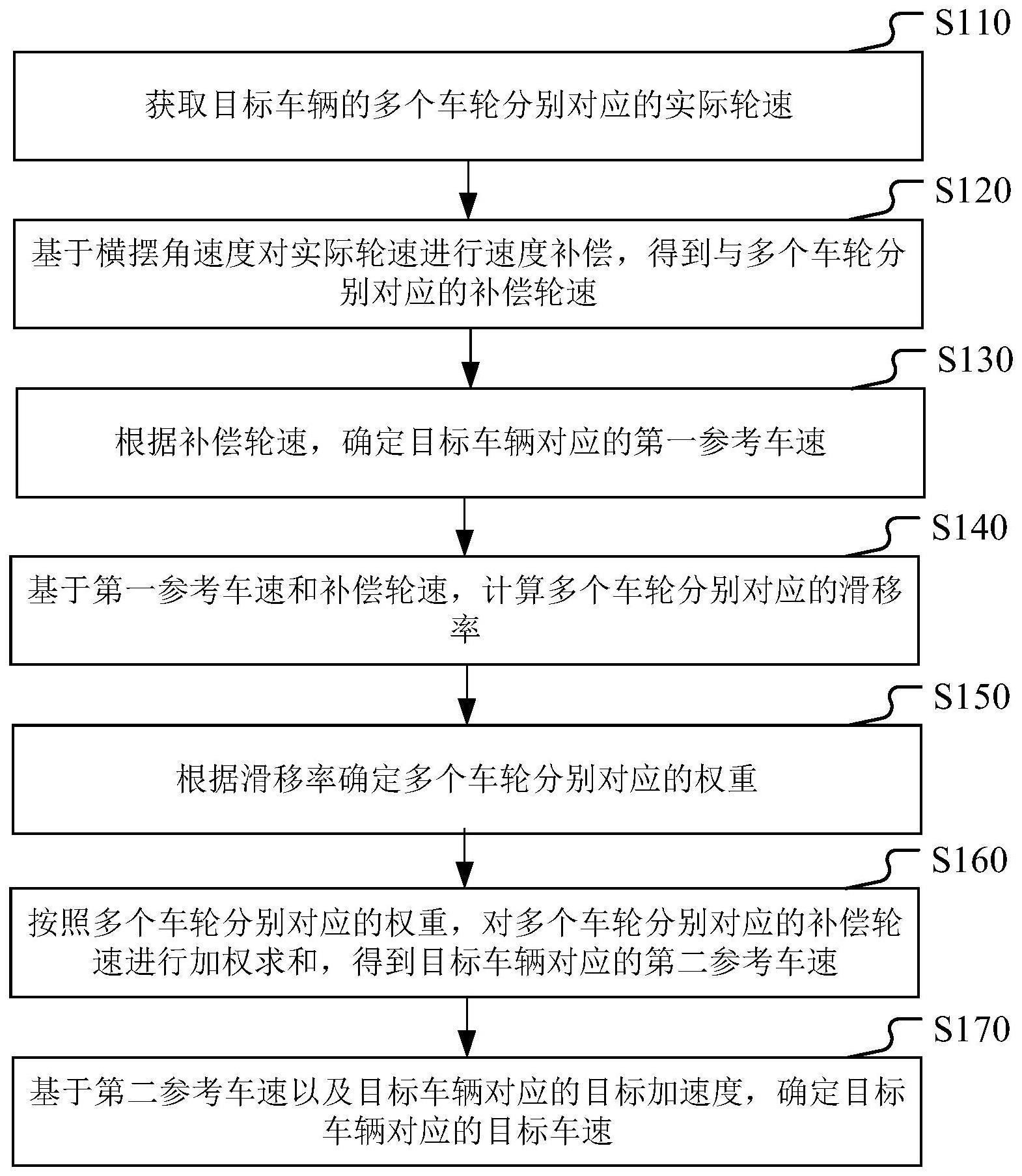
3、获取目标车辆的多个车轮分别对应的实际轮速;
4、基于横摆角速度对所述实际轮速进行速度补偿,得到与所述多个车轮分别对应的补偿轮速;
5、根据所述补偿轮速,确定所述目标车辆对应的第一参考车速;
6、基于所述第一参考车速和所述补偿轮速,计算所述多个车轮分别对应的滑移率;
7、根据所述滑移率确定所述多个车轮分别对应的权重;
8、按照所述多个车轮分别对应的权重,对所述多个车轮分别对应的所述补偿轮速进行加权求和,得到所述目标车辆对应的第二参考车速;
9、基于所述第二参考车速以及所述目标车辆对应的目标加速度,确定所述目标车辆对应的目标车速。
10、在一些实施方式中,所述根据所述补偿轮速,确定所述目标车辆对应的第一参考车速,包括:
11、获取所述目标车辆对应的制动状态;
12、在所述制动状态为制动启动的情况下,将所述多个车轮分别对应的补偿轮速中的最大轮速确定为所述目标车辆对应的所述第一参考车速;
13、在所述制动状态为制动关闭的情况下,将所述多个车轮分别对应的补偿轮速中的最小轮速确定为所述目标车辆对应的所述第一参考车速。
14、在一些实施方式中,所述基于所述第一参考车速和所述补偿轮速,计算所述多个车轮分别对应的滑移率,包括:
15、获取所述目标车辆对应的历史参考车速;
16、对所述历史参考车速与所述第一参考车速构成的第一速度曲线,进行滤波处理,得到第二速度曲线;
17、基于所述第二速度曲线,确定所述第一参考车速经所述滤波处理后得到的第三参考车速;
18、基于所述第三参考车速和所述补偿轮速,计算所述多个车轮分别对应的滑移率。
19、在一些实施方式中,所述基于所述第三参考车速和所述补偿轮速,计算所述多个车轮分别对应的滑移率,包括:
20、在所述第三参考车速大于预设阈值的情况下,分别计算每个车轮对应的所述补偿轮速与所述第三参考车速之间的差值,并将所述差值与所述第三参考车速之间的比值确定为所述车轮对应的滑移率,得到所述多个车轮分别对应的滑移率;
21、在所述第三参考车速不大于所述预设阈值的情况下,分别将每个车轮对应的所述补偿轮速与所述第三参考车速之间的差值确定为所述车轮对应的滑移率,得到所述多个车轮分别对应的滑移率。
22、在一些实施方式中,所述根据所述滑移率确定所述多个车轮分别对应的权重,包括:
23、在所述第三参考车速大于预设阈值的情况下,确定滑移率与权重之间的第一对应关系,并基于所述第一对应关系,根据所述多个车轮分别对应的滑移率确定对应的权重;
24、在所述第三参考车速不大于预设阈值的情况下,确定滑移率与权重之间的第二对应关系,并基于所述第二对应关系,根据所述多个车轮分别对应的滑移率确定对应的权重。
25、在一些实施方式中,在基于所述第二参考车速以及所述目标车辆对应的目标加速度,确定所述目标车辆对应的目标车速之前,所述方法还包括:
26、根据所述历史参考车速以及所述第三参考车速,计算所述目标车辆对应的目标加速度;
27、所述基于所述第二参考车速以及所述目标车辆对应的目标加速度,确定所述目标车辆对应的目标车速,包括:
28、在所述目标加速度小于第一预设阈值的情况下,将所述多个车轮分别对应的补偿轮速中的最大轮速确定为所述目标车速;
29、在所述目标加速度不小于所述第一预设阈值,且不大于第二预设阈值的情况下,确定加速度与车速之间的第三对应关系,并基于所述第三对应关系,根据所述目标加速度确定所述目标车速;
30、在所述目标加速度大于所述第二预设阈值,且小于第三预设阈值的情况下,将所述第二参考车速确定为所述目标车速;
31、在所述目标加速度不小于所述第三预设阈值,且不大于第四预设阈值的情况下,确定加速度与车速之间的第四对应关系,并基于所述第四对应关系,根据所述目标加速度确定所述目标车速;
32、在所述目标加速度大于所述第四预设阈值的情况下,将所述多个车轮分别对应的补偿轮速中的最小轮速确定为所述目标车速;
33、其中,所述第三对应关系中所述车速的取值区间为所述最大轮速与所述第二参考车速对应的区间,所述第四对应关系中所述车速的取值区间为所述第二参考车速与所述最小轮速对应的区间。
34、在一些实施方式中,在基于所述第二参考车速以及所述目标车辆对应的目标加速度,确定所述目标车辆对应的目标车速之后,该方法还包括:
35、获取所述目标车辆对应的历史车速;
36、对所述历史车速与所述目标车速构成的第三速度曲线,进行滤波处理,得到第四速度曲线;
37、基于所述第四速度曲线,将所述目标车速经所述滤波处理后得到的车速,确定为所述目标车辆的最终车速。
38、第二方面,本技术实施例提供了一种车速确定装置,该装置包括:
39、轮速获取模块,用于获取目标车辆的多个车轮分别对应的实际轮速;
40、轮速补偿模块,用于基于横摆角速度对所述实际轮速进行速度补偿,得到与所述多个车轮分别对应的补偿轮速;
41、第一确定模块,用于根据所述补偿轮速,确定所述目标车辆对应的第一参考车速;
42、滑移率计算模块,用于基于所述第一参考车速和所述补偿轮速,计算所述多个车轮分别对应的滑移率;
43、权重确定模块,用于根据所述滑移率确定所述多个车轮分别对应的权重;
44、加权求和模块,用于按照所述多个车轮分别对应的权重,对所述多个车轮分别对应的所述补偿轮速进行加权求和,得到所述目标车辆对应的第二参考车速;
45、第二确定模块,用于基于所述第二参考车速以及所述目标车辆对应的目标加速度,确定所述目标车辆对应的目标车速。
46、在一些实施方式中,所述第一确定模块包括:
47、状态获取子模块,用于获取所述目标车辆对应的制动状态;
48、第一确定子模块,用于在所述制动状态为制动启动的情况下,将所述多个车轮分别对应的补偿轮速中的最大轮速确定为所述目标车辆对应的所述第一参考车速;
49、第二确定子模块,用于在所述制动状态为制动关闭的情况下,将所述多个车轮分别对应的补偿轮速中的最小轮速确定为所述目标车辆对应的所述第一参考车速。
50、在一些实施方式中,所述滑移率计算模块包括:
51、车速获取子模块,用于获取所述目标车辆对应的历史参考车速;
52、第一滤波子模块,用于对所述历史参考车速与所述第一参考车速构成的第一速度曲线,进行滤波处理,得到第二速度曲线;
53、第三确定子模块,用于基于所述第二速度曲线,确定所述第一参考车速经所述滤波处理后得到的第三参考车速;
54、第一计算子模块,用于基于所述第三参考车速和所述补偿轮速,计算所述多个车轮分别对应的滑移率。
55、在一些实施方式中,所述第一计算子模块包括:
56、第一确定单元,用于在所述第三参考车速大于预设阈值的情况下,分别计算每个车轮对应的所述补偿轮速与所述第三参考车速之间的差值,并将所述差值与所述第三参考车速之间的比值确定为所述车轮对应的滑移率,得到所述多个车轮分别对应的滑移率;
57、第二确定单元,用于在所述第三参考车速不大于所述预设阈值的情况下,分别将每个车轮对应的所述补偿轮速与所述第三参考车速之间的差值确定为所述车轮对应的滑移率,得到所述多个车轮分别对应的滑移率。
58、在一些实施方式中,所述权重确定模块包括:
59、第四确定子模块,用于在所述第三参考车速大于预设阈值的情况下,确定滑移率与权重之间的第一对应关系,并基于所述第一对应关系,根据所述多个车轮分别对应的滑移率确定对应的权重;
60、第五确定子模块,用于在所述第三参考车速不大于预设阈值的情况下,确定滑移率与权重之间的第二对应关系,并基于所述第二对应关系,根据所述多个车轮分别对应的滑移率确定对应的权重。
61、在一些实施方式中,所述装置还包括:
62、加速度计算模块,用于在基于所述第二参考车速以及所述目标车辆对应的目标加速度,确定所述目标车辆对应的目标车速之前,根据所述历史参考车速以及所述第三参考车速,计算所述目标车辆对应的目标加速度;
63、所述第二确定模块包括:
64、第六确定子模块,用于在所述目标加速度小于第一预设阈值的情况下,将所述多个车轮分别对应的补偿轮速中的最大轮速确定为所述目标车速;
65、第七确定子模块,用于在所述目标加速度不小于所述第一预设阈值,且不大于第二预设阈值的情况下,确定加速度与车速之间的第三对应关系,并基于所述第三对应关系,根据所述目标加速度确定所述目标车速;
66、第八确定子模块,用于在所述目标加速度大于所述第二预设阈值,且小于第三预设阈值的情况下,将所述第二参考车速确定为所述目标车速;
67、第九确定子模块,用于在所述目标加速度不小于所述第三预设阈值,且不大于第四预设阈值的情况下,确定加速度与车速之间的第四对应关系,并基于所述第四对应关系,根据所述目标加速度确定所述目标车速;
68、第十确定子模块,用于在所述目标加速度大于所述第四预设阈值的情况下,将所述多个车轮分别对应的补偿轮速中的最小轮速确定为所述目标车速;
69、其中,所述第三对应关系中所述车速的取值区间为所述最大轮速与所述第二参考车速对应的区间,所述第四对应关系中所述车速的取值区间为所述第二参考车速与所述最小轮速对应的区间。
70、在一些实施方式中,该装置还包括:
71、车速获取模块,用于在基于所述第二参考车速以及所述目标车辆对应的目标加速度,确定所述目标车辆对应的目标车速之后,获取所述目标车辆对应的历史车速;
72、滤波处理模块,用于对所述历史车速与所述目标车速构成的第三速度曲线,进行滤波处理,得到第四速度曲线;
73、车速确定模块,用于基于所述第四速度曲线,将所述目标车速经所述滤波处理后得到的车速,确定为所述目标车辆的最终车速。
74、第三方面,本技术实施例提供了一种电子设备,该电子设备包括:处理器以及存储有计算机程序指令的存储器;
75、处理器执行所述计算机程序指令时实现如第一方面的任一项实施例中所述的车速确定方法的步骤。
76、第四方面,本技术实施例提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序指令,计算机程序指令被处理器执行时实现如第一方面的任一项实施例中所述的车速确定方法的步骤。
77、第五方面,本技术实施例提供了一种计算机程序产品,计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备执行如第一方面的任一项实施例中所述的车速确定方法的步骤。
78、本技术实施例中的车速确定方法、装置、设备、介质及产品,通过基于目标车辆的横摆角速度对多个车轮的实际轮速进行速度补偿,得到该多个车轮分别对应的补偿轮速,进而基于该补偿轮速确定的第一参考车速,以及该补偿轮速,计算各个车轮分别对应的滑移率,利用滑移率确定每个车轮对应的权重,并按照该权重对每个车轮的补偿轮速进行加权求和,得到第二参考车速,基于该第二参考车速和该目标车辆的目标加速度确定得到该目标车辆对应的目标车速,如此,由于参考了横摆角速度和滑移率对车速的影响,因此,即使在极低速、转弯、大加速、大减速等特殊情况下仍能确定得到较为准确的车速,降低了车速的失真度,提高了准确性。
- 还没有人留言评论。精彩留言会获得点赞!