一种车辆控制方法、装置及计算机存储介质与流程
本发明涉及车辆控制,特别是涉及一种车辆控制方法、装置及计算机存储介质。
背景技术:
1、制动管路主要用于将制动主缸中的制动液传递到各个车轮制动器,车辆在行驶到一定的里程或者使用年份过长时,制动系统的零件就会出现老化现象,制动管路老化会引起刹车油管漏油;或者车辆在发生交通事故后,很容易将制动系统磕碰到,此种情况也可有可能导致刹车油管漏油。若制动管路泄漏,会导致制动系统出现故障,从而影响车辆驾驶的安全性。相关技术中,在车辆的制动管路泄漏的状态下,通过驾驶员深踩制动踏板实现车辆减速,减速过程存在明显的减速度缺失,且可能导致车辆失稳,造成驾驶员的恐慌,从而造成次生风险。
技术实现思路
1、本发明的目的在于提供一种车辆控制方法、装置及计算机存储介质,保证整车在制动系统管路泄漏状态下能够实现最大的制动减速度以及车辆稳定性,从而减轻驾驶员的恐慌,避免造成次生风险。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、第一方面,本发明实施例提供了一种车辆控制方法,所述车辆控制方法包括:
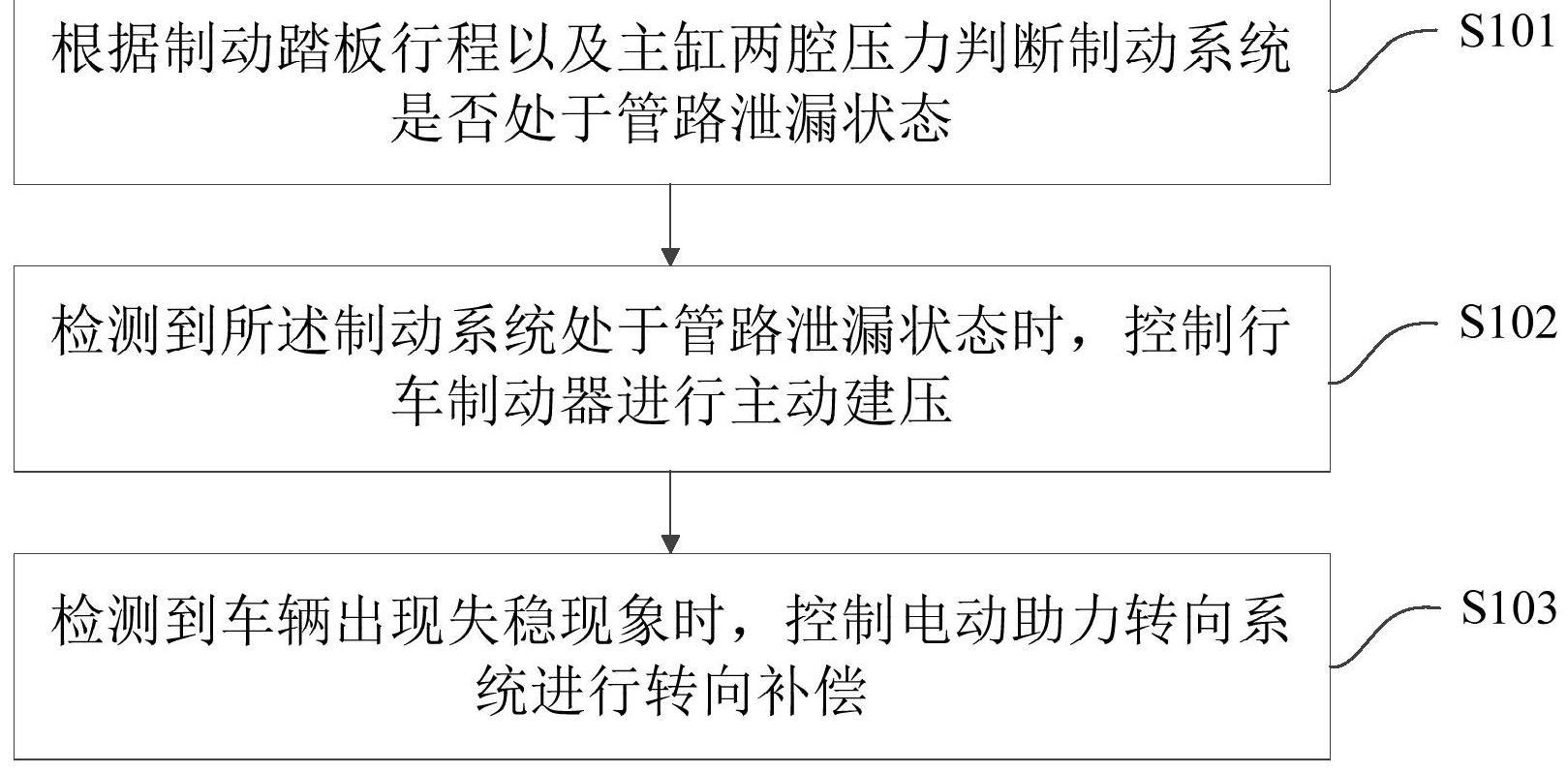
4、根据制动踏板行程以及主缸两腔压力判断制动系统是否处于管路泄漏状态;
5、检测到所述制动系统处于管路泄漏状态时,控制行车制动器进行主动建压;
6、检测到车辆出现失稳现象时,控制电动助力转向系统进行转向补偿。
7、作为其中一种实施方式,所述根据制动踏板行程以及主缸两腔压力判断制动系统是否处于管路泄漏状态,包括:
8、获取所述制动踏板行程以及所述主缸两腔压力;
9、若所述制动踏板行程以及所述主缸两腔压力的比值大于第一预设阈值,则判断所述制动系统处于管路泄漏状态。
10、作为其中一种实施方式,所述检测到车辆出现失稳现象时,控制电动助力转向系统进行转向补偿,包括:
11、获取所述车辆的横摆角速度;
12、在所述横摆角速度的变化速率大于第二预设阈值时,确认所述车辆出现失稳现象。
13、作为其中一种实施方式,所述车辆控制方法还包括:
14、若在所述车辆出现失稳现象时无法通过所述电动助力转向系统进行转向补偿,则减小轮端压力。
15、作为其中一种实施方式,所述若在所述车辆出现失稳现象时无法通过所述电动助力转向系统进行转向补偿,则减小轮端压力,包括:
16、若在所述车辆出现失稳现象时无法通过所述电动助力转向系统进行转向补偿,则控制所述行车制动器减小主缸行程。
17、作为其中一种实施方式,所述若在所述车辆出现失稳现象时无法通过所述电动助力转向系统进行转向补偿,则减小轮端压力,还包括:
18、若在所述车辆出现失稳现象时无法通过所述电动助力转向系统进行转向补偿,则控制电子稳定控制系统打开减压阀。
19、第二方面,本发明实施例提供了一种车辆控制装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述车辆控制方法的步骤。
20、第三方面,本发明实施例提供了一种计算机存储介质,所述计算机存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述车辆控制方法的步骤。
21、本发明实施例提供的一种车辆控制方法、装置及计算机存储介质,所述车辆控制方法包括:根据制动踏板行程以及主缸两腔压力判断制动系统是否处于管路泄漏状态;检测到所述制动系统处于管路泄漏状态时,控制行车制动器进行主动建压;检测到车辆出现失稳现象时,控制电动助力转向系统进行转向补偿。如此,根据制动踏板行程以及主缸两腔压力判断制动系统是否处于管路泄漏状态,检测到制动系统处于管路泄漏状态时,控制行车制动器进行主动建压,以及检测到车辆出现失稳现象时,控制电动助力转向系统进行转向补偿,保证了整车在制动系统管路泄漏状态下能够实现最大的制动减速度以及车辆稳定性,从而减轻驾驶员的恐慌,避免造成次生风险。
技术特征:
1.一种车辆控制方法,其特征在于,所述车辆控制方法包括:
2.根据权利要求1所述的车辆控制方法,其特征在于,所述根据制动踏板行程以及主缸两腔压力判断制动系统是否处于管路泄漏状态,包括:
3.根据权利要求1所述的车辆控制方法,其特征在于,所述检测到车辆出现失稳现象时,控制电动助力转向系统进行转向补偿,包括:
4.根据权利要求1所述的车辆控制方法,其特征在于,还包括:
5.根据权利要求4所述的车辆控制方法,其特征在于,所述若在所述车辆出现失稳现象时无法通过所述电动助力转向系统进行转向补偿,则减小轮端压力,包括:
6.根据权利要求4所述的车辆控制方法,其特征在于,所述若在所述车辆出现失稳现象时无法通过所述电动助力转向系统进行转向补偿,则减小轮端压力,还包括:
7.一种车辆控制装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述车辆控制方法的步骤。
8.一种计算机存储介质,所述计算机存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述车辆控制方法的步骤。
技术总结
本发明公开了一种车辆控制方法、装置及计算机存储介质,所述车辆控制方法包括:根据制动踏板行程以及主缸两腔压力判断制动系统是否处于管路泄漏状态;检测到所述制动系统处于管路泄漏状态时,控制行车制动器进行主动建压;检测到车辆出现失稳现象时,控制电动助力转向系统进行转向补偿。本发明提供的一种车辆控制方法、装置及计算机存储介质,检测到制动系统处于管路泄漏状态时,控制行车制动器进行主动建压,以及检测到车辆出现失稳现象时,控制电动助力转向系统进行转向补偿,保证了整车在制动系统管路泄漏状态下能够实现最大的制动减速度以及车辆稳定性,从而减轻驾驶员的恐慌,避免造成次生风险。
技术研发人员:陶喆,刘富庆,张宝斌,潘盼,林森
受保护的技术使用者:上海拿森汽车电子有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!