一种多轴式汽车悬架控制方法与流程
本技术涉及汽车悬架,具体涉及一种多轴式汽车悬架控制方法。
背景技术:
1、特种车辆配置液压悬架系统,利用液压系统调整各轮的悬架高度,从而满足对车辆姿态进行调节的需求。
2、但在车辆的车轴较多、且路面凹凸不平时,需要设定各轮悬架的高度计算方法,否则不能实现各轮悬架的合理升降,达不到车辆姿态调整的目标。
技术实现思路
1、针对现有技术中存在的缺陷,本技术的目的在于提供一种多轴式汽车悬架控制方法,能够在车辆车轴较多、各轴轮距存在差异、以及路面凹凸平工况下对车辆姿态进行适应性调整控制。
2、为达到以上目的,采取的技术方案是:
3、本技术第一方面提供一种多轴式汽车悬架控制方法,
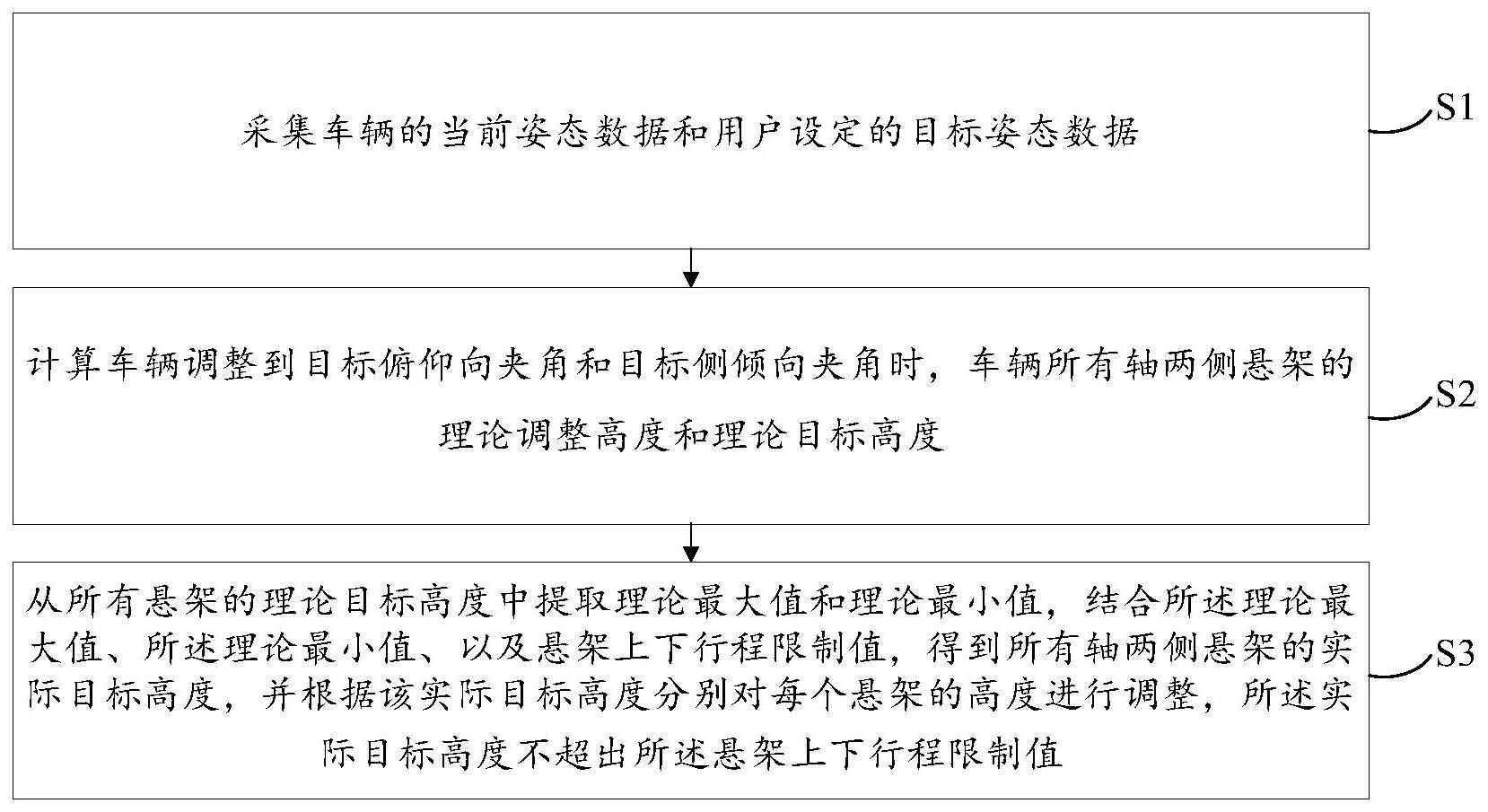
4、采集车辆的当前姿态数据和用户设定的目标姿态数据;所述当前姿态数据包括所有轴两侧悬架的当前离地高度、车辆x向与路面之间的当前俯仰向夹角、以及车辆y向与路面之间的当前侧倾向夹角;所述目标姿态数据包括车辆x向与路面之间的目标俯仰向夹角和车辆y向与路面之间的目标侧倾向夹角;所述路面为与任一车轮接触的路面;
5、分别计算车辆调整到目标俯仰向夹角和目标侧倾向夹角时,车辆所有轴两侧悬架的理论调整高度和理论目标高度;所述理论目标高度为悬架的当前离地高度和理论调整高度的和;
6、从所有悬架的理论目标高度中提取理论最大值和理论最小值,结合所述理论最大值、所述理论最小值、以及悬架上下行程限制值,得到所有轴两侧悬架的实际目标高度,并根据该实际目标高度分别对每个悬架的高度进行调整,所述实际目标高度不超出所述悬架上下行程限制值。
7、一些实施例中,因车辆x向与路面之间的俯仰向夹角变化导致的所有轴两侧悬架的所述理论调整高度采用下述公式计算得到:
8、
9、其中,
10、δhari表示车辆x向与路面之间的俯仰向夹角调整至所述目标俯仰向夹角时,第i轴右侧悬架的理论调整高度;
11、δhali表示车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,第i轴左侧悬架的理论调整高度;
12、i表示从车头至车尾方向的轴顺序;
13、di表示车辆的第i轴至第n轴的轴距;n表示车辆的总轴数;
14、αtarget表示所述目标俯仰向夹角;
15、α表示所述当前侧倾向夹角。
16、一些实施例中,因车辆y向与路面之间的侧倾向夹角变化导致的所有轴两侧悬架的所述理论调整高度采用下述公式计算得到:
17、
18、其中,
19、δhrri表示车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,第i轴右侧悬架的理论调整高度;
20、δhrli表示车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,第i轴左侧悬架的理论调整高度;
21、li表示车辆的第i轴的轮距;
22、γtarget表示所述目标侧倾向夹角;
23、γ表示所述当前俯仰向夹角。
24、一些实施例中,当车辆x向与路面之间的俯仰向夹角调整至所述目标俯仰向夹角、且车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,因车辆姿态变化导致的每个悬架总的所述理论调整高度采用下述公式计算得到:
25、
26、其中,
27、δhri表示因车辆姿态变化导致的第i轴右侧悬架总的理论调整高度;
28、δhli表示因车辆姿态变化导致的第i轴左侧悬架总的理论调整高度;
29、δhari表示车辆x向与路面之间的俯仰向夹角调整至所述目标俯仰向夹角时,第i轴右侧悬架的理论调整高度;
30、δhali表示车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,第i轴左侧悬架的理论调整高度;
31、δhrri表示车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,第i轴右侧悬架的理论调整高度;
32、δhrli表示车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,第i轴左侧悬架的理论调整高度。
33、一些实施例中,当车辆x向与路面之间的俯仰向夹角调整至所述目标俯仰向夹角、且车辆y向与路面之间的侧倾向夹角调整至所述目标侧倾向夹角时,车每个悬架的理论目标高度采用下述公式计算得到:
34、
35、其中,
36、h1ri表示车辆的第i轴右侧悬架的理论目标高度;
37、h1li表示车辆的第i轴左侧悬架的理论目标高度;
38、hri表示所述车辆第i轴右侧悬架的当前离地高度;
39、hli表示所述车辆第i轴左侧悬架的当前离地高度;
40、δhri表示因车辆姿态变化导致的第i轴右侧悬架总的理论调整高度;
41、δhli表示因车辆姿态变化导致的第i轴左侧悬架总的理论调整高度。
42、一些实施例中,所述悬架上下行程限制值包括悬架向上调整时的悬架上行程限制值和悬架向下调整时的悬架下行程限制值;
43、所述结合理论最大值、理论最小值、以及悬架上下行程限制值,得到所有轴两侧悬架的实际目标高度,并根据该实际目标高度分别对每个悬架的高度进行调整,具体步骤如下:
44、分别计算理论最大值与悬架上行程限制值之间的第一差值、以及悬架下行程限制值与理论最小值之间的第二差值;
45、在第一差值和第二差值均为正数时,对理论目标高度进行压缩,直至第一差值和第二差值均不为正数;
46、在第一差值不为正、且第二差值为正时,若第一差值的绝对值不小于第二差值的绝对值,则在理论目标高度的基础上加上第二差值的绝对值得到实际目标高度;若第一差值的绝对值小于第二差值的绝对值,则实际目标高度采用悬架上行程限制值、或在理论目标高度的基础上加上第二差值的绝对值得到的值中较小的一个;
47、在第一差值为正、且第二差值不为正时,若第一差值的绝对值不大于第二差值的绝对值,则在理论目标高度的基础上减去第一差值的绝对值得到实际目标高度;若第一差值的绝对值大于第二差值的绝对值,则实际目标高度采用悬架下行程限制值、或在理论目标高度的基础上减去第一差值的绝对值得到的值中较大的一个;
48、在第一差值和第二差值均不为正数时,以理论目标高度作为实际目标高度,并根据该实际目标高度分别对每个悬架的高度进行调整。
49、一些实施例中,当所述第一差值为正、且所述第二差值为正时,采用下述公式计算得到车辆第i轴右侧悬架的选择系数:
50、
51、其中,
52、fri表示车辆第i轴右侧悬架的选择系数;
53、h1ri表示车辆的第i轴右侧悬架的目标高度;
54、huplimt表示悬架上行程限制值;
55、hdowmlimt表示悬架下行程限制值;
56、当所述第一差值为正、且所述第二差值为正时,采用下述公式计算得到车辆第i轴左侧悬架的选择系数:
57、
58、其中,
59、fli表示车辆第i轴左侧悬架的选择系数;
60、h1li表示车辆的第i轴左侧悬架的目标高度。
61、一些实施例中,采用下述公式计算得到所有轴两侧悬架的实际调整高度:
62、
63、其中,
64、htargetri表示车辆第i轴右侧悬架的实际目标高度;
65、htargetli表示车辆第i轴左侧悬架的实际目标高度。
66、一些实施例中,当所述第一差值不为正、且所述第二差值为正时,所述计算策略具体内容如下:
67、在第一差值的绝对值不小于第二差值的绝对值时,采用下述公式计算得到所有轴两侧悬架的实际目标高度:
68、
69、其中,
70、htargetri表示车辆第i轴右侧悬架的实际目标高度;
71、htargetli表示车辆第i轴左侧悬架的实际目标高度;
72、h1ri表示车辆的第i轴右侧悬架的理论目标高度;
73、h1li表示车辆的第i轴左侧悬架的理论目标高度;
74、δhmin表示悬架下行程限制值与所述理论最小值之间的第二差值;
75、在第一差值的绝对值小于第二差值的绝对值时,采用下述公式计算得到所有轴两侧悬架的实际目标高度:
76、
77、其中,
78、huplimt表示悬架上行程限制值。
79、一些实施例中,当所述第一差值为正、且所述第二差值不为正时,所述计算策略具体内容如下:
80、在第一差值的绝对值不大于第二差值的绝对值时,采用下述公式计算得到所有轴两侧悬架的实际目标高度:
81、
82、其中,
83、htargtri表示车辆第i轴右侧悬架的实际目标高度;
84、htargetli表示车辆第i轴左侧悬架的实际目标高度;
85、h1ri表示车辆的第i轴右侧悬架的目标高度;
86、h1li表示车辆的第i轴左侧悬架的目标高度;
87、δhmax表示所述最大值与悬架上行程限制值之间的第一差值;
88、在第一差值的绝对值大于第二差值的绝对值时,采用下述公式计算得到所有轴两侧悬架的实际目标高度:
89、
90、其中,
91、hdowmlimt表示悬架下行程限制值。
92、本技术提供的技术方案带来的有益效果包括:
93、可根据驾驶员需求任意设定车辆的目标姿态并实现该目标姿态控制。
94、考虑了多轴式汽车的不同车轴的轮距差异对悬架高度的影响,提高了控制精度,
95、通过计算各悬架度的变化量加上原高度得到目标高度的方式可自动适应即使车辆停在凹凸不平路面,依然可以正常实现车辆的目标姿态控制,提高了悬架系统的调整能力和实际工程应用能力。
96、考虑了悬架的行程能力范围,保证各悬架高度始终在行程范围内,避免了悬架系统超能力而损害的风险,保护各悬架系统,提高了悬架的可靠性和寿命。
- 还没有人留言评论。精彩留言会获得点赞!