无人机充电调度系统的制作方法
1.本技术涉及无人机充电技术领域,尤其涉及一种无人机充电调度系统。
背景技术:
2.无人机在人们的生活中的应用领域十分广泛,诸如在警用领域有森林防火和交通监管等应用,在工业领域有铁路建设和矿产开发等应用,无人机的使用给人们带来了非常显著的便利。但是现有技术,无人机的续航时间短,且无人机的充电工作一般只能通过人工进行,充电工序繁琐。
技术实现要素:
3.为至少在一定程度上克服相关技术中无人机的充电工作通过人工进行,充电工序繁琐的问题,本技术提供一种无人机充电调度系统。
4.本技术的方案如下:
5.一种无人机充电调度系统,包括:
6.充电站和无人机;
7.所述充电站外侧涂装有图像标记;
8.所述无人机中搭载有图像识别模块;
9.所述无人机用于通过所述图像识别模块获取并识别所述图像标记,通过所述图像标记确定所述充电站的空间位置。
10.优选的,在本技术一种可实现的方式中,还包括:停机坪;
11.所述停机坪搭建在所述充电站一侧,用于在所述充电站无法停靠时为所述无人机提供停靠场所。
12.优选的,在本技术一种可实现的方式中,所述停机坪为多个,多个所述停机坪环绕所述充电站搭建。
13.优选的,在本技术一种可实现的方式中,还包括:超宽带(ultra wide band,uwb)基站;
14.所述无人机中还搭载有uwb定位模块,所述无人机用于通过所述uwb定位模块与所述uwb基站进行交互获取当前定位信息。
15.优选的,在本技术一种可实现的方式中,所述uwb基站为多个,多个所述uwb基站环绕所述充电站和所述停机坪搭建。
16.优选的,在本技术一种可实现的方式中,所述无人机还搭载有通信模块;
17.所述无人机用于通过所述通信模块与所述充电站建立通信连接;
18.所述充电站用于通过所述通信连接获取所述无人机的当前定位信息并根据所述当前定位信息调整充电线圈位置。
19.优选的,在本技术一种可实现的方式中,所述无人机中还搭载有全球定位系统(global positioning system,gps)定位模块。
20.优选的,在本技术一种可实现的方式中,所述无人机中还搭载有光流传感器、气压计和加速度计。
21.本技术提供的技术方案可以包括以下有益效果:本技术中的无人机充电调度系统,包括:充电站和无人机。其中,充电站外侧涂装有图像标记,无人机中搭载有图像识别模块。无人机可以通过图像识别模块获取并识别充电站外侧涂装的图像标记,本技术中的图像识别模块可以依据现有技术中的openmv视觉识别功能确定充电站的空间位置,进而无人机可以根据充电站的空间位置自主飞行到充电站进行充电操作,节省人力资源。
22.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
23.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
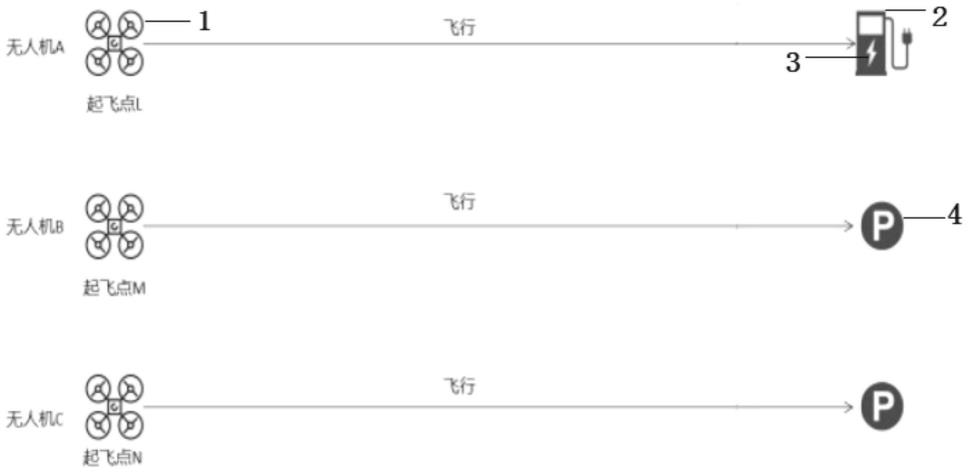
24.图1是本技术一个实施例提供的一种无人机充电调度系统的结构示意图;
25.图2是本技术另一个实施例提供的一种无人机充电调度系统的结构示意图;
26.图3是本技术又一个实施例提供的一种无人机充电调度系统的结构示意图。
27.附图标记:无人机-1;充电站-2;图像标记-3;停机坪-4;uwb基站-5;
具体实施方式
28.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
29.一种无人机充电调度系统,参照图1,包括:
30.充电站2和无人机1;
31.充电站2外侧涂装有图像标记3;
32.无人机1中搭载有图像识别模块;
33.无人机1用于通过图像识别模块获取并识别图像标记3,通过图像标记3确定充电站2的空间位置。
34.本实施例中的充电站2即为无人机1专用的充电站2。
35.本实施例中的无人机1可以但不限于为holybro s500无人机。本实施例中的无人机1机身自重机身自782g并搭载pixhawk 4飞行控制配载电机air2216kv880,传动力矩为0.18n*m,最高转速可达10464r/min,最大瞬时推力1293g。
36.本实施例中的无人机1搭载的图像识别模块可以但不限于为openmv视觉模块,openmv视觉模块配有usd卡槽,可达500兆的瞬时传输速率。openmv视觉模块还配有ov5640感光元件,可处理2592*1944即500万像素图片。
37.本实施例中,在充电站2外侧涂装有特定图像标记3(可以为如图1所示的闪电logo等标记)用于为无人机1进行引航。无人机1可以通过图像识别模块获取并识别充电站2外侧涂装的图像标记3,本实施例中无人机1的图像识别模块可以依据现有技术中的openmv视觉
识别功能确定充电站2的空间位置,进而无人机1可以根据充电站2的空间位置自主飞行到充电站2进行充电操作,节省人力资源。本实施例中,无人机1可自主寻找充电站2,脱离手动操作完成充电。
38.一些实施例中的无人机充电调度系统,参照图2,还包括:停机坪4;
39.停机坪4搭建在充电站2一侧,用于在充电站2无法停靠时为无人机1提供停靠场所。
40.进一步的,停机坪4为多个,多个停机坪4环绕充电站2搭建。
41.由于现有技术中有时需要多个无人机1同时工作,若多个无人机1同时电量过低需要充电,而充电站2一般只能为一台无人机1进行充电。此时其他无人机1便无处停靠,为解决此问题,本实施例中,在充电站2附近搭建多个停机坪4,在充电站2当前处于工作状态(即为无人机1充电的状态)无法停靠时,停机坪4可以为其他排队待充电的无人机1提供停靠场所。
42.一些实施例中的无人机充电调度系统,参照图3,还包括:uwb基站5;
43.无人机1中还搭载有uwb定位模块,无人机1用于通过uwb定位模块与uwb基站5进行交互获取当前定位信息。
44.进一步的,uwb基站5为多个,多个uwb基站5环绕充电站2和停机坪4搭建。
45.uwb技术是一种无线载波通信技术,它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。uwb技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点,尤其适用于室内等密集多径场所的高速无线接入。
46.本实施例中,为了解决现有技术中无人机1定位系统单一,无法适应多环境飞行的问题,还搭建多个uwb基站5用于辅助无人机1进行定位,定位精度可达mm级别。
47.进一步的,无人机1还搭载有通信模块;
48.无人机1用于通过通信模块与充电站2建立通信连接;
49.充电站2用于通过通信连接获取无人机1的当前定位信息并根据当前定位信息调整充电线圈位置。
50.本实施例中,基于上述的uwb定位技术,可以对无人机1实现mm级定位,在无人机1停靠到充电站2进行充电时,无人机1通过通信模块将当前定位信息发送到充电站2,充电站2根据无人机1的当前定位信息调整充电线圈位置与无人机1进行匹配,充电效率更高。
51.一些实施例中的无人机充电调度系统,无人机1中还搭载有gps定位模块。
52.gps定位作为现有技术中无人机1常用的定位系统,可以为无人机1提供优良的室外定位服务。
53.一些实施例中的无人机充电调度系统,无人机1中还搭载有光流传感器、气压计和加速度计。
54.结合以上优选实施例,本实施例中的无人机1可以通过uwb定位和gps定位两种定位服务以及光流传感器、气压计和加速度计等多传感器完成室内外飞行路径转换,实现cm级别的无人机1控制系统。
55.可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
56.需要说明的是,在本技术的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本技术的描述中,除非另有说明,“多个”的含义是指至少两个。
57.流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本技术的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本技术的实施例所属技术领域的技术人员所理解。
58.应当理解,本技术的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
59.本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
60.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1