一种番茄采摘机器人底盘
1.本实用新型属于农业机器人技术领域,具体涉及一种番茄采摘机器人底盘。
背景技术:
2.我国是番茄种植大国,随着农业智能化的发展,以成熟的番茄为采摘对象,具有自主导航,自主路径规划,精确识别并自主完成采摘任务的番茄采摘机器人逐渐取代人工采摘,但生长在温室环境中的番茄,路面土壤松软,路况复杂,增加了机器人行走的困难程度。为了克服这一困难,因此设计一种番茄采摘机器人底盘。
技术实现要素:
3.本实用新型所要解决的技术问题便是针对上述现有技术的不足,提供一种番茄采摘机器人底盘,它具有良好的减震性能、灵活的转向性能及可靠的承载性能。
4.本实用新型所采用的技术方案是:一种番茄采摘机器人底盘,包括车架、两个前轮和两个后轮,所述车架的前端两侧和后端两侧均对称安装有悬架机构,所述悬架机构包括上叉臂和下叉臂,上叉臂与下叉臂的一端分别与车架的上部和底部连接,上叉臂和下叉臂的另一端之间安装有羊角轴承,所述前轮内侧安装有转向节,转向节连接在羊角轴承外侧,所述车架前端中部对称固定安装有转向节臂,两个转向节臂之间通过连杆连接,所述转向节臂通过转向球铰链与转向节连接,其中一个转向节臂连接有转向驱动臂,转向驱动臂通过连接件与舵盘连接,舵盘底部安装有舵机,舵机固定安装在车架上,所述后轮为带轮毂电机的车轮,后轮通过转轴与车架后端两侧的羊角轴承连接,所述悬架机构上还安装有减震器,减震器的的一端与下叉臂铰接,另一端与车架上部连接。
5.作为优选,所述车架的前端和后端还分别安装有防撞条。
6.作为优选,所述车架前端顶部安装有支架,支架前侧安装有深度相机,后侧安装有激光雷达。
7.作为优选,所述车架中部安装有支撑壳体。
8.本实用新型的有益效果在于:
9.(1)采用阿克曼转向结构,使得机器人的操控性更好,转向更加灵活、精准;
10.(2)采用轮毂电机驱动后轮,大大简化了传动机械结构,减轻了车架重量,提高了传动效率;
11.(3)采用双叉臂独立悬架结构,能有效提高机器人的越障能力和减震能力,从而提高了机器人的行走稳定性;
12.(4)设置有防撞条,能避免在实际作业中发生撞坏植株或大棚支架的情况。
13.本实用新型具有良好的减震性能、灵活的转向性能以及可靠的承载性能,能有效提高机器人的作业效率。
附图说明
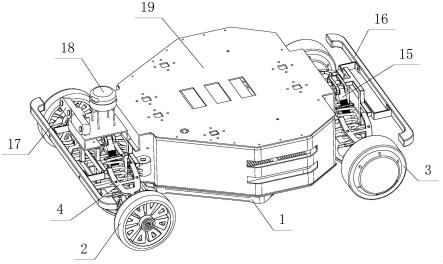
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的无支撑壳体示意图;
16.图3为本实用新型的俯视图;
17.图4为本实用新型的前端的示意图;
18.图5为本实用新型的后端爆炸图。
19.图中:1、车架;2、前轮;3、后轮;4、上叉臂;5、下叉臂;6、羊角轴承;7、转向节;8、转向节臂;9、连杆;10、转向球铰链;11、转向驱动臂;12、连接件;13、舵盘;14、舵机;15、减震器;16、防撞条;17、深度相机;18、激光雷达;19、支撑壳体。
具体实施方式
20.下面将结合附图及具体实施例对本实用新型作进一步详细说明。
21.实施例
22.如图1、图2、图3、图4和图5所示,本实施例提供的番茄采摘机器人底盘,包括车架1、两个前轮2和两个后轮3,所述车架1的前端两侧对称安装有悬架机构,所述悬架机构包括上叉臂4和下叉臂5,上叉臂4与下叉臂5的一端分别与车架1的上部和底部连接,上叉臂4和下叉臂5的另一端之间安装有羊角轴承6,所述悬架机构上还安装有减震器15,所述减震器15的一端固定在下叉臂5靠近羊角轴承6处,另一端固定在车架1前部的顶部,所述前轮2内侧安装有转向节7,转向节7位于羊角轴承6与前轮2之间,所述车架1前部中间位置对称安装有转向节臂8,两个转向节臂8之间通过连杆9连接,所述转向节臂8靠近对应前轮2的一侧与转向节7之间通过转向球铰链10连接,其中一个转向节臂8连接有转向驱动臂11,转向驱动臂11通过连接件12与舵盘13连接,舵盘13底部安装有舵机14,舵机14固定安装在车架1上;
23.所述车架1的后端两侧对称同样安装有悬架机构,所述悬架机构的上叉臂4与下叉臂5的一端分别与车架1的上部和底部连接,上叉臂4和下叉臂5的另一端之间安装有羊角轴承6,所述悬架机构上还安装有减震器15,所述减震器15的一端固定在下叉臂5靠近羊角轴承6处,另一端固定在车架1后部的顶部,所述后轮3为带轮毂电机的车轮,后轮3通过转轴与车架1后端两侧的羊角轴承6连接;
24.所述车架1的前端和后端还分别安装有防撞条16;所述车架1前端顶部安装有支架,支架前侧安装有深度相机17,后侧安装有激光雷达18;所述车架1中部安装有支撑壳体19,支撑壳体19内可用于固定控制板、驱动板等支撑壳体19表面可用于支撑固定采摘机器人。
25.本实用新型通过轮毂电机驱动后轮3,使后轮3作为动力轮,实现底盘的移动;通过转向节7、转向节臂8、转向球铰链10和连杆9构成阿克曼转向机构,并与两个前轮2连接,使前轮2作为转向轮;悬架机构为包括单独设置的上叉臂4和下叉臂5,并配合减震器15构成双叉臂独立悬架结构,能有效提高行走过程中的减震及越障能力。
26.本实用新型通过舵机14控制转向驱动臂11,转向驱动臂11带动转向节臂8转动,从而带动转向球铰链10和转向节7运动,使得前轮2进行导向偏转,从而实现行走转弯。
27.以上所述仅是本实用新型优选的实施方式,但本实用新型的保护范围并不局限于此,任何基于本实用新型所提供的技术方案和发明构思进行的改造和替换都应涵盖在本实
用新型的保护范围内。
技术特征:
1.一种番茄采摘机器人底盘,包括车架(1)、两个前轮(2)和两个后轮(3),其特征在于:所述车架(1)的前端两侧和后端两侧均对称安装有悬架机构,所述悬架机构包括上叉臂(4)和下叉臂(5),上叉臂(4)与下叉臂(5)的一端分别与车架(1)的上部和底部连接,上叉臂(4)和下叉臂(5)的另一端之间安装有羊角轴承(6),所述前轮(2)内侧安装有转向节(7),转向节(7)连接在羊角轴承(6)外侧,所述车架(1)前端中部对称固定安装有转向节臂(8),两个转向节臂(8)之间通过连杆(9)连接,所述转向节臂(8)通过转向球铰链(10)与转向节(7)连接,其中一个转向节臂(8)连接有转向驱动臂(11),转向驱动臂(11)通过连接件(12)与舵盘(13)连接,舵盘(13)底部安装有舵机(14),舵机(14)固定安装在车架(1)上,所述后轮(3)为带轮毂电机的车轮,后轮(3)通过转轴与车架(1)后端两侧的羊角轴承(6)连接,所述悬架机构上还安装有减震器(15),减震器(15)的一端与下叉臂(5)铰接,另一端与车架(1)上部连接。2.根据权利要求1所述的一种番茄采摘机器人底盘,其特征在于:所述车架(1)的前端和后端还分别安装有防撞条(16)。3.根据权利要求1或2所述的一种番茄采摘机器人底盘,其特征在于:所述车架(1)前端顶部安装有支架,支架前侧安装有深度相机(17),后侧安装有激光雷达(18)。4.根据权利要求3所述的一种番茄采摘机器人底盘,其特征在于:所述车架(1)中部安装有支撑壳体(19)。
技术总结
本实用新型公开了一种番茄采摘机器人底盘,包括车架、两个前轮和两个后轮,所述车架的前端两侧和后端两侧均对称安装有悬架机构,所述悬架机构包括上叉臂和下叉臂,上叉臂与下叉臂的一端分别与车架的上部和底部连接,上叉臂和下叉臂的另一端之间安装有羊角轴承,所述前轮内侧安装有转向节,所述车架前端中部对称固定安装有转向节臂,所述转向节臂通过转向球铰链与转向节连接,其中一个转向节臂通过转向驱动臂和连接件与舵盘连接,舵盘底部安装有舵机,所述后轮为带轮毂电机的车轮,所述悬架机构上还安装有减震器。本实用新型具有良好的减震性能、灵活的转向性能以及可靠的承载性能,能有效提高机器人的作业效率。能有效提高机器人的作业效率。能有效提高机器人的作业效率。
技术研发人员:王昱彤 陈万和 邱志东 史颖刚 刘利
受保护的技术使用者:西北农林科技大学
技术研发日:2022.04.14
技术公布日:2022/7/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1