一种装载机360度全景多界面可视系统的制作方法
本发明涉及全景可视化,具体涉及一种装载机360度全景多界面可视系统。
背景技术:
1、由于装载机车型车身长,车体高,产生的视觉盲区非常多,目前我们在驾驶装载机时,通常依赖车内外的后视镜来观察车辆周围状况,依靠倒车后视、倒车雷达提醒后方有无障碍物。后视镜跟倒车雷达虽然在一定程度上保障安全行,但是确远远不够,普通的倒车影像系统所成影像也只凸显后方一侧,在车辆前及两侧仍存在着很大的盲区,依靠倒车后视在泊车时很难停到精确位置,复杂路况下的行车安全问题更加凸显。
技术实现思路
1、针对现有技术的不足,本发明的目的旨在提供一种装载机360度全景多界面可视系统,给予拍摄和图像合成技术使得图像的可以先达到全方位视角,驾驶员能够更直观更完整的观察车辆周围环境。
2、为实现上述目的,本发明采用如下技术方案:
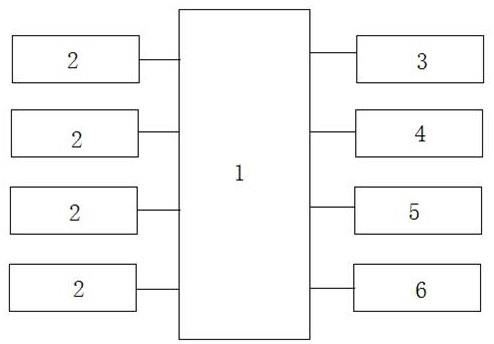
3、一种装载机360度全景多界面可视系统,包括:
4、若干个图像获取设备,所述图像获取设备安装在装载机车身的前后左右四个方位上,用于获取装载机车辆周围的环境图像,所述若干个图像获取设备均与主机控制器连接,将拍摄的装载机车辆周围的环境图像上传给主机控制器;
5、全景摄像头定标模块,建立世界坐标与图像获取设备坐标的关系,创建图像获取设备与拍摄的装载机车辆周围的环境图像坐标的关系,从而确定世界坐标与装载机车辆周围的环境图像坐标的关系;
6、图像美化模块,采用ccd传感器根据环境图像采集的不同光源,对环境图像进行亮度调整、黑白平衡控制、色彩跑合度、对比度以及伽马矫正。
7、图像拼接模块,依据人眼视觉效果,将不同角度的环境图像进行平滑无缝的连接;
8、图像显示设备,将所述图像拼接模块拼接出来的全景环境图像显示出来。
9、进一步地,所述全景摄像头定标模块中所使用的世界坐标系是物体在现实世界中三维的坐标点,所述坐标点由摄像机安装位置决定,用所述坐标点来描绘确定好物体的位置,位置选择的标准是以标记物体的中心作为环境图像的原点,目的是为了能够精确的确定标记物体的坐标,从而便于摄像机坐标与采集的环境图像坐标之间的转换,根据全景摄像头的位置信息和角度信息来获得坐标变换后的环境图像;
10、环境图像坐标系,世界坐标系上的物体在自然光照的映射,反射一些光线,这些光线通过图像获取设备进行采集,并转化为数字信号,以矩阵的形式进行存储。
11、进一步地,所述图像获取设备为全景摄像头,所述全景摄像头为4个,分别安装在装载机车辆的前后左右的车身上。
12、进一步地,所述全景摄像头在拍摄装载机车辆周围的环境图像之前需要设定全景摄像头的内外参数,对全景摄像头的内部参数进行标定,保证采集的图像信息准确无误。
13、进一步地,所述全景摄像头的内部参数包括图像中心坐标、焦距、比例因子和镜头畸变。
14、进一步地,所述图像显示设备为全景显示屏。
15、本发明的有益效果在于:本发明通过利用安装在车身前后左右4个超广角摄像头捕捉车辆周围情况。通过合成一副车身周围的全景鸟瞰图,将车辆四周真实画面展示出来,通过显示屏我们可以清楚的观察到车身周边障碍物,司机在行车,泊车、倒车时可避免车辆的剐蹭、碰撞,造成严重的交通事。
技术特征:
1.一种装载机360度全景多界面可视系统,其特征在于,包括:
2.如权利要求1所述的一种装载机360度全景多界面可视系统,其特征在于,所述全景摄像头定标模块中所使用的世界坐标系是物体在现实世界中三维的坐标点,所述坐标点由摄像机安装位置决定,用所述坐标点来描绘确定好物体的位置,位置选择的标准是以标记物体的中心作为环境图像的原点,目的是为了能够精确的确定标记物体的坐标,从而便于摄像机坐标与采集的环境图像坐标之间的转换,根据全景摄像头的位置信息和角度信息来获得坐标变换后的环境图像;
3.如权利要求1所述的一种装载机360度全景多界面可视系统,其特征在于,所述全景摄像头在拍摄装载机车辆周围的环境图像之前需要设定全景摄像头的内外参数,对全景摄像头的内部参数进行标定,保证采集的图像信息准确无误。
4.如权利要求3所述的一种装载机360度全景多界面可视系统,其特征在于,所述全景摄像头的内部参数包括图像中心坐标、焦距、比例因子和镜头畸变。
技术总结
本技术属于全景可视化技术领域,公开了一种装载机360度全景多界面可视系统,包括:若干个图像获取设备,图像获取设备安装在装载机车身的前后左右四个方位上,用于获取装载机车辆周围的环境图像,全景摄像头定标模块,确定世界坐标与装载机车辆周围的环境图像坐标的关系;图像美化模块,采用CCD传感器根据环境图像采集的不同光源,对环境图像进行亮度调整、黑白平衡控制等,图像拼接模块,依据人眼视觉效果,将不同角度的环境图像进行平滑无缝的连接,图像显示设备将全景环境图像显示出来。本技术通过利用安装在车身前后左右4个超广角摄像头捕捉车辆周围情况,司机在行车,泊车、倒车时可避免车辆的剐蹭、碰撞,造成严重的交通事故。
技术研发人员:李彦轩,王金华,卢晓栋,周敏,刘振雷
受保护的技术使用者:英轩重工有限公司
技术研发日:20220719
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!