车辆控制装置的制作方法
本发明涉及一种搭载于车辆的控制车轮的滑移状态的车辆控制装置。
背景技术:
1、以往,已知运算车辆的目标滑移率,以使实际的车轮的滑移率与目标滑移率一致的方式调节车辆的驱动转矩的驱动转矩控制。目标滑移率的值例如基于车辆的要求驱动力进行运算。另外,如果目标滑移率的值变得过大,则车轮容易打滑。因此,目标滑移率的值被限制在预先设定的规定的上限值以下的范围(参照专利文献1~3)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2009-65793号公报
5、专利文献2:日本专利第4637136号公报
6、专利文献3:日本专利第4907390号公报
7、发明所要解决的技术问题
8、另一方面,最优的滑移率的值可以根据车辆的行驶状态、路面状态而变化。因此,如果实施将目标滑移率的上限值固定的状态下的驱动转矩控制,则有行驶性能和稳定性降低的情况。例如,如果目标滑移率的上限值过小,则作用于车轮与路面之间的摩擦力变小,行驶性能(驱动力、制动力)下降。另外,如果目标滑移率的上限值过大,则作用于车轮的横向力变小,车身姿势的稳定性下降。
技术实现思路
1、本发明的目的之一是提供一种鉴于上述那样的技术问题而发明的能够改善车辆的行驶性能和稳定性的车辆控制装置。此外,不限于该目的,通过后述的“具体实施方式”所示的各结构所导出的作用效果,发挥利用现有技术无法得到的作用效果也能定位成本发明的其他目的。
2、用于解决技术问题的技术手段
3、本发明能够作为以下公开的方式或应用例来实现。本发明的车辆控制装置解决上述的技术问题的至少一部分。
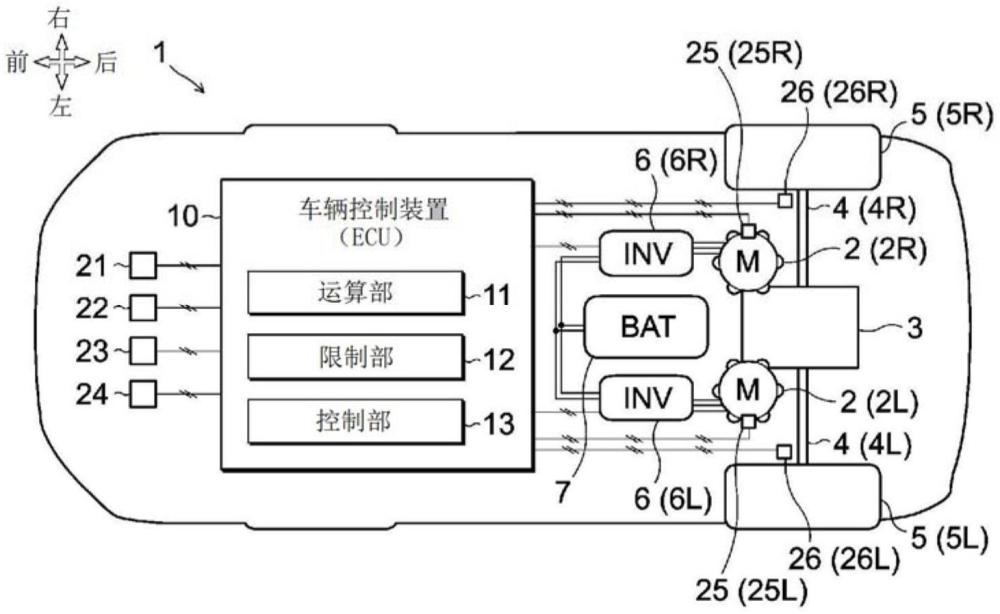
4、在此公开的车辆控制装置是搭载于车辆的控制车轮的滑移状态的车辆控制装置,具备:运算部,该运算部运算作为所述车轮的滑移率的目标值的目标滑移率;限制部,该限制部至少基于所述车辆的车速来设定所述目标滑移率的上限值,并且将由所述运算部运算出的所述目标滑移率限制在所述上限值以下;以及控制部,该控制部控制所述车辆的驱动转矩,以达到成为由所述限制部限制的所述目标滑移率的车轮速度。
5、发明的效果
6、根据发明的车辆控制装置,能够改善车辆的行驶性能和稳定性。
技术特征:
1.一种车辆控制装置,搭载于车辆并控制车轮的滑移状态,其特征在于,具备:
2.根据权利要求1所述的车辆控制装置,其特征在于,
3.根据权利要求1或2所述的车辆控制装置,其特征在于,
4.根据权利要求1至3中任一项所述的车辆控制装置,在具备向左右轮赋予转矩差的差动机构和与所述差动机构连接的一对电动机的所述车辆中,该车辆控制装置通过控制所述一对电动机的工作状态来分别控制所述左右轮的滑移状态,其特征在于,
5.根据权利要求1至4中任一项所述的车辆控制装置,其特征在于,
6.根据权利要求5所述的车辆控制装置,其特征在于,
技术总结
本发明的车辆控制装置(10)具备:运算作为车轮(5)的滑移率(λ)的目标值的目标滑移率(y)的运算部(11);至少基于车辆(1)的车速(V)来设定目标滑移率(y)的上限值(y<subgt;max</subgt;),并且将由运算部(11)运算出的目标滑移率(y)限制在上限值(y<subgt;max</subgt;)以下的限制部(12);以及控制车辆(1)的驱动转矩,以达到成为由限制部(12)限制的目标滑移率(y)的车轮速度的控制部(13)。
技术研发人员:高桥亮太,藤本博志,布施空由,高桥直树,松尾俊辅,冈村悠太郎,古贺亮佑
受保护的技术使用者:三菱自动车工业株式会社
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!