一种自动泊车识别方法与流程
本发明涉及一种自动泊车识别方法,属于自动泊车。
背景技术:
1、随着智能车辆的崛起,越来越多的自动泊车车辆投入使用,与之相对应的是,如何智能且准确的实现自动泊车尤为重要。
2、目前,对于自动泊车识别的方法包括:获取泊车车位,基于泊车车位实现对自动泊车路径的规划,驱动自动泊车车辆按照自动泊车路径行驶至泊车车位。
3、虽然上述方法能够实现对待泊车车辆自动泊车路径的规划,但是在识别泊车车位时未考虑光照不良等环境影响因素,在对待泊车车辆执行自动泊车时未考虑自动泊车路径存在意外情况,造成自动泊车方案不灵活及自动泊车识别结果不准确的问题。
技术实现思路
1、本发明提供一种自动泊车识别方法、装置及计算机可读存储介质,其主要目的在于解决自动泊车方案不灵活及自动泊车识别结果不准确的问题。
2、为实现上述目的,本发明提供的一种自动泊车识别方法,包括:
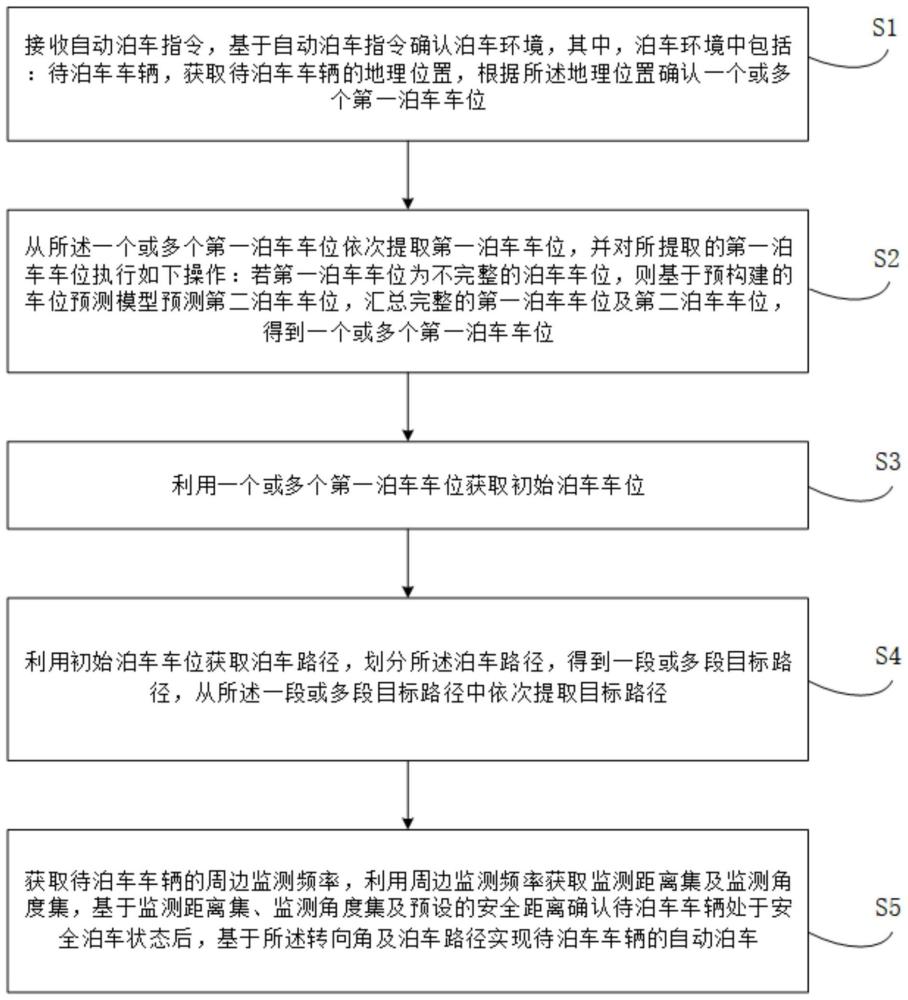
3、接收自动泊车指令,基于自动泊车指令确认泊车环境,其中,泊车环境中包括:待泊车车辆,获取待泊车车辆的地理位置,根据所述地理位置确认一个或多个第一泊车车位;
4、从所述一个或多个第一泊车车位依次提取第一泊车车位,并对所提取的第一泊车车位执行如下操作:
5、若第一泊车车位为不完整的泊车车位,则基于预构建的车位预测模型预测第二泊车车位,其中,车位预测模型为深度学习模型;
6、汇总完整的第一泊车车位及第二泊车车位,得到一个或多个第一泊车车位;
7、利用一个或多个第一泊车车位获取初始泊车车位;
8、利用初始泊车车位获取泊车路径,划分所述泊车路径,得到一段或多段目标路径,从所述一段或多段目标路径中依次提取目标路径,并对所提取的目标路径执行如下操作:
9、计算所提取目标路径的转向角,计算公式如下所示:
10、
11、其中,θo表示待泊车车辆在第o段目标路径的转向角,α为转向角的修正系数,l为待泊车车辆的轴距,βo为待泊车车辆当前航向与第o段目标路径圆弧之间弦切角的大小,lo为车辆在第o段目标路径的预瞄距离;
12、获取待泊车车辆的周边监测频率,利用周边监测频率获取监测距离集及监测角度集,基于监测距离集、监测角度集及预设的安全距离确认待泊车车辆处于安全泊车状态后,基于所述转向角及泊车路径实现待泊车车辆的自动泊车。
13、可选地,所述利用一个或多个第一泊车车位获取初始泊车车位,包括:
14、从所述一个或多个第一泊车车位中依次提取第一泊车车位,并对所提取的第一泊车车位执行如下操作:
15、获取待泊车车辆的车辆信息,其中,车辆信息包括车辆位置信息及车辆尺寸信息,根据车辆信息、预设的水平方向约束、竖直方向约束及第一泊车车位获取泊车路径,汇总所述泊车路径,得到泊车路径集;
16、基于所述泊车路径集获取理想泊车路径,其中,理想泊车路径为泊车路径集中泊车路径所对应泊车距离最短的泊车路径,理想泊车路径所对应的泊车车位为初始泊车车位。
17、可选地,所述基于监测距离集、监测角度集及预设的安全距离确认待泊车车辆处于安全泊车状态,包括:
18、从所述监测距离集中依次提取监测距离,并比较所提取的监测距离与所述安全距离;
19、若监测距离集中的监测距离均大于或等于安全距离,则确认待泊车车辆处于安全泊车状态;
20、否则,获取待泊车车辆的第一记录时间,记录并标识监测距离集中监测距离小于安全距离的一个或多个障碍物,得到第一监测距离集及第一记录集,并在下一周边监测频率中获取监测距离小于所述安全距离的一个或多个障碍物,得到第二记录集;
21、基于第一记录集及第二记录集获取目标记录集,其中,目标记录集为同时存在于第一记录集及第二记录集中一个或多个障碍物的集合,根据目标记录集获取第二监测距离集,利用第二监测距离集及第一监测距离集中目标障碍物所对应监测距离集中的监测距离获取一个或多个差值距离,其中,一个或多个差值距离均不为零;
22、否则,获取待泊车车辆的第二记录时间,基于第一记录时间及第二记录时间获取等待时间,若等待时间大于或等于预设的等待阈值,则返回所述利用初始泊车车位获取泊车路径的步骤。
23、可选地,所述根据所述地理位置确认一个或多个第一泊车车位,包括:
24、基于地理位置获取周边图像集,从周边图像集中依次提取周边图像,并对所提取的周边图像执行如下操作:
25、利用预训练的泊车车位识别模型识别所提取的周边图像,确认所提取的周边图像包括泊车车位特征后,获取所提取周边图像的拓展图像集,从所述拓展图像集中依次提取拓展图像,并对所提取的拓展图像执行如下操作:
26、对拓展图像执行灰度化操作,得到灰度化图像,对所述灰度化图像执行顶帽变换操作,得到顶帽变换图像,对所述顶帽变换图像执行均衡化操作,得到均衡图像;
27、对所述均衡图像执行滤波操作,并对滤波操作后的均衡图像执行锐化操作,得到锐化图像;
28、利用预训练的图像识别器识别所述锐化图像,得到一个或多个第一泊车车位。
29、可选地,所述利用周边监测频率获取监测距离集及监测角度集,包括:
30、以待泊车车辆为圆心,基于周边监测频率及预构建的雷达发射器向待泊车车辆所在泊车环境发射雷达信号,其中,所发射的雷达信号为初始雷达信号,利用预构建的雷达接收器接收在泊车环境中的初始雷达信号,得到回波雷达信号;
31、基于所述初始雷达信号、回波雷达信号、预构建的相对角度关系式及预构建的相对距离关系式获取监测距离集及监测角度集,其中,监测距离集中包括n个监测距离,监测角度集中包括m个监测角度,n=m,且监测距离集中每一个监测距离仅对应监测角度集中的一个监测角度。
32、可选地,所述划分所述泊车路径,得到一段或多段目标路径,包括:
33、利用预构建的转向半径计算公式计算泊车路径所对应的一个或多个转向半径,其中,转向半径计算公式如下所示:
34、
35、其中,re表示第e段目标路径,g1e表示第e段目标路径所对应泊车路径的一阶导数,ge2表示第e段目标路径所对应泊车路径的二阶导数;
36、获取一个或多个转向半径所对应的一个或多个转向圆心,基于所述一个或多个转向圆心及一个或多个转向半径划分所述泊车路径,得到一段或多段目标路径。
37、可选地,所述基于所述初始雷达信号、回波雷达信号、预构建的相对角度关系式及预构建的相对距离关系式获取监测距离集及监测角度集,包括:
38、所述相对角度关系式,如下所示:
39、
40、其中,θh表示一个或多个障碍物中第h个障碍物与待泊车车辆之间的夹角,ω表示回波雷达信号的角频率,表示回波雷达信号的波长,d表示待泊车车辆两根接收天线之间的距离;
41、所述相对距离关系,如下所示:
42、
43、其中,rh表示一个或多个障碍物中第h个障碍物与待泊车车辆之间的距离,c表示光在空气中的传播速度,t为初始雷达信号的周期,f1表示待泊车车辆中频信号的频率,中频信号由初始雷达信号及回波雷达信号所构成,b表示初始雷达信号的扫频带宽。
44、可选地,所述利用第二监测距离集及第一监测距离集中目标障碍物所对应监测距离集中的监测距离获取一个或多个差值距离,包括:
45、获取同一个目标障碍物在第一监测距离集及第二监测距离集中所对应的位置坐标,得到第一位置坐标及第二位置坐标,利用第一位置坐标、第二位置坐标及预设的差值距离计算公式计算差值距离,其中,差值距离计算公式如下所示:
46、
47、其中,sh表示第h个障碍物的差值距离,(qh1,wh1)表示第h个障碍物在第一监测距离集中所对应的第一位置坐标,(qh2,wh2)表示第h个障碍物在目标记录集中所对应位置的第二位置坐标。
48、可选地,所述基于所述一个或多个转向圆心及一个或多个转向半径划分所述泊车路径,得到一段或多段目标路径,包括:
49、根据一个或多个转向半径将所述泊车路径划分为一段或多段初始路径;
50、从所述一段或多段初始路径中依次提取初始路径,并对所提取的初始路径执行如下操作:
51、确认每段初始路径仅对应一个转向圆心,则所确认的初始路径为目标路径;
52、否则,获取初始路径所对应的v个转向圆心,基于所述v个转向圆心将所提取的初始路径划分为b段目标路径,其中,v=b,且v为大于等于2的整数。
53、可选地,所述水平方向约束、竖直方向约束,包括:
54、其中,水平方向约束如下所示:
55、
56、其中,xi表示一段或多段目标泊车路段中第i个目标泊车路段与初始泊车车位平行的路程长度,u表示共有u个目标泊车路段,s0表示待泊车车辆与初始泊车车位在水平方向上的距离,p1表示初始泊车车位在水平方向上的长度,b0表示待泊车车辆泊车至初始泊车车位时,预设的待泊车车辆车头处与初始泊车车位的距离,b1表示待泊车车辆泊车至初始泊车车位时,预设的待泊车车辆车尾处与初始泊车车位的距离;
57、其中,竖直方向约束如下所示:
58、
59、其中,yi表示一段或多段目标泊车路段中第i个目标泊车路段与初始泊车车位垂直方向上路程的长度,s1表示待泊车车辆与初始泊车车位在垂直方向上的距离,p2表示初始泊车车位在垂直方向上的长度,b2表示待泊车车辆泊车至初始泊车车位时,预设的待泊车车辆左侧与初始泊车车位的距离,b3表示待泊车车辆泊车至初始泊车车位时,预设的待泊车车辆右侧与初始泊车车位的距离。
60、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
61、至少一个处理器;以及,
62、与所述至少一个处理器通信连接的存储器;其中,
63、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以实现上述所述的自动泊车识别方法。
64、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的自动泊车识别方法。
65、相比于背景技术所述问题,本发明先接收自动泊车指令,基于自动泊车指令确认泊车环境,其中,泊车环境中包括:待泊车车辆,获取待泊车车辆的地理位置,根据所述地理位置确认一个或多个第一泊车车位,可见本发明所述泊车环境更加具体,即考虑了待泊车车辆自身的因素可能会造成对泊车路径的影响。其后,从所述一个或多个第一泊车车位依次提取第一泊车车位,并对所提取的第一泊车车位执行如下操作:若第一泊车车位为不完整的泊车车位,则基于预构建的车位预测模型预测第二泊车车位,其中,车位预测模型为深度学习模型,汇总完整的第一泊车车位及第二泊车车位,得到一个或多个第一泊车车位。对应地,第一泊车车位的确认与待泊车车辆的位置有关,并不是所有的位置均能获取到完整的第一泊车车位,因此,需要考虑待泊车车位不完整的情况,可见本发明所考虑的泊车车位存在可能不完整的情况,也更加符合实际生活,此外,本发明利用一个或多个第一泊车车位获取初始泊车车位,可见本发明通过先确定一个初始泊车车位,且初始泊车车位所对应泊车的能耗最少,并基于初始泊车车位进行初步的泊车。利用初始泊车车位获取泊车路径,划分所述泊车路径,得到一段或多段目标路径,从所述一段或多段目标路径中依次提取目标路径,可见本发明不仅考虑了泊车路径,还考虑了划分泊车路径,进而为计算每段目标路径所对应的转向角奠定基础,通过每段目标路径的转向角实现对待泊车车辆在自动泊车过程中的指导,获取待泊车车辆的周边监测频率,利用周边监测频率获取监测距离集及监测角度集,基于监测距离集、监测角度集及预设的安全距离确认待泊车车辆处于安全泊车状态后,基于所述转向角及泊车路径实现待泊车车辆的自动泊车,可见本发明并非只考虑了基于初始泊车车位实现对待泊车车辆的自动泊车,还考虑了在自动泊车过程中存在可能影响自动泊车的因素,并通过步骤的迭代实现对泊车路径的重新规划,进一步地,提高了自动泊车方案的灵活性及自动泊车结果的准确性。因此本发明提出的自动泊车识别方法、装置、电子设备及计算机可读存储介质,其主要目的在于解决自动泊车方案不灵活及自动泊车识别结果不准确的问题。
- 还没有人留言评论。精彩留言会获得点赞!