基于优化的规划系统的制作方法
背景技术:
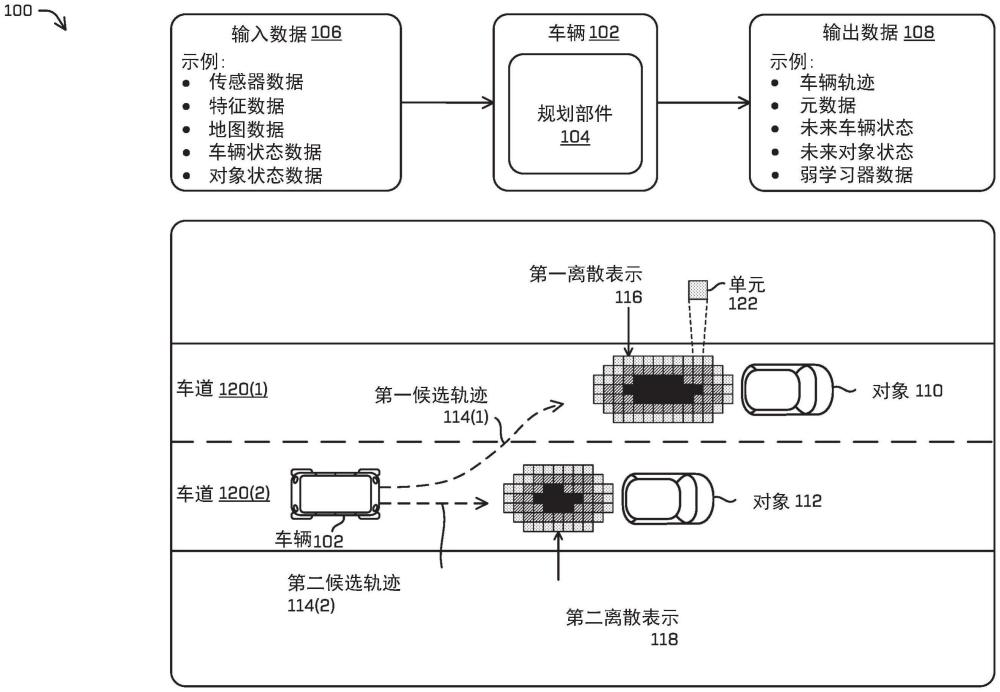
1、自主车辆和半自主车辆中的规划系统确定车辆在操作环境中要采取的动作。可以部分地基于避开环境中存在的对象来确定车辆的动作。例如,可以通过规划系统生成动作以避让行人、改变车道以避开道路中的另一个车辆等。感知系统利用来自传感器的传感器数据来“查看”环境,使得规划系统能够确定检测到的对象对车辆的潜在动作的影响。
技术实现思路
技术特征:
1.一种系统,包括:
2.如权利要求1所述的系统,其中:
3.如权利要求1或2所述的系统,其中,所述成本集合为第一成本集合,所述特征为第一特征,并且所述操作进一步包括:
4.如权利要求1-3中任一项所述的系统,所述操作进一步包括:
5.如权利要求1-4中任一项所述的系统,其中,确定所述第一输出数据是由第一模型执行的,并且所述操作进一步包括:
6.一种方法,包括:
7.如权利要求6所述的方法,其中:
8.如权利要求6或7所述的方法,其中:
9.如权利要求6-8中任一项所述的方法,进一步包括:
10.如权利要求6-9中任一项所述的方法,其中,第一模型确定所述第一输出数据,并且所述方法进一步包括:
11.如权利要求6-10中任一项所述的方法,进一步包括:
12.如权利要求6-11中任一项所述的方法,进一步包括:
13.如权利要求6-12中任一项所述的方法,进一步包括:
14.如权利要求6-13中任一项所述的方法,其中:
15.一种包括编码指令的计算机程序产品,所述编码指令当在计算机上运行时,实现如权利要求6至14中任一项所述的方法。
技术总结
本文讨论了用于聚合与一个或多个热图相关联的成本以在环境中控制车辆的技术。车辆计算装置可以实施模型以基于传感器数据来确定环境的不同特征的热图和相应的成本信息。车辆计算装置可以基于将热图组合来输出用于车辆的规划轨迹。这些技术还可以包括确定合理化或根本原因以详细说明确定规划轨迹的原因。
技术研发人员:J·施瓦茨,P·C·沙阿
受保护的技术使用者:祖克斯有限公司
技术研发日:
技术公布日:2024/5/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1