一种车辆航向角的确定方法、装置及设备与流程
本申请涉及车辆领域,尤其涉及一种车辆航向角的确定方法、装置及设备。
背景技术:
1、汽车在行驶过程中,需要确定当前的航向角,并根据该航向角控制车辆的行驶方向。其中,该航向角是指大地坐标系下,车辆质心的速度(即车辆的行驶方向)与大地坐标系中的横轴的夹角,该横轴的正方向一般为正北方向。
2、目前普遍采用路侧感知设备计算车辆航向角,路侧感知设备由视觉传感器(比如摄像机等)、毫米波雷达和激光雷达等多种传感器组成,现有技术中由激光雷达组成的路侧感知设备可以直接输出航向角,但是激光雷达价格昂贵且部署困难,而其他类型的路侧感知设备无法给出航向角参数。
3、在不采用激光雷达的前提下,目前普遍的针对于车辆路侧感知设备计算车辆航向角的方式主要是利用高精度地图获取航向角,但是针对复杂的道路场景(例如:十字路口),由于十字路口中心区域车道线错综复杂,导致利用高精地图获取航向角时无法精确的确定车辆航向角。
4、因此,针对复杂道路如何获取精确的车辆航向角,成为了亟待解决的技术问题。
技术实现思路
1、本说明书实施例提供一种车辆航向角的确定方法、装置及设备,以解决现有的确定车辆航向角方法存在的不采用激光雷达的前提下针对复杂的道路场景获取的车辆航向角不准确的问题。
2、为解决上述技术问题,本说明书实施例是这样实现的:
3、本说明书实施例提供的一种车辆航向角的确定方法,包括:
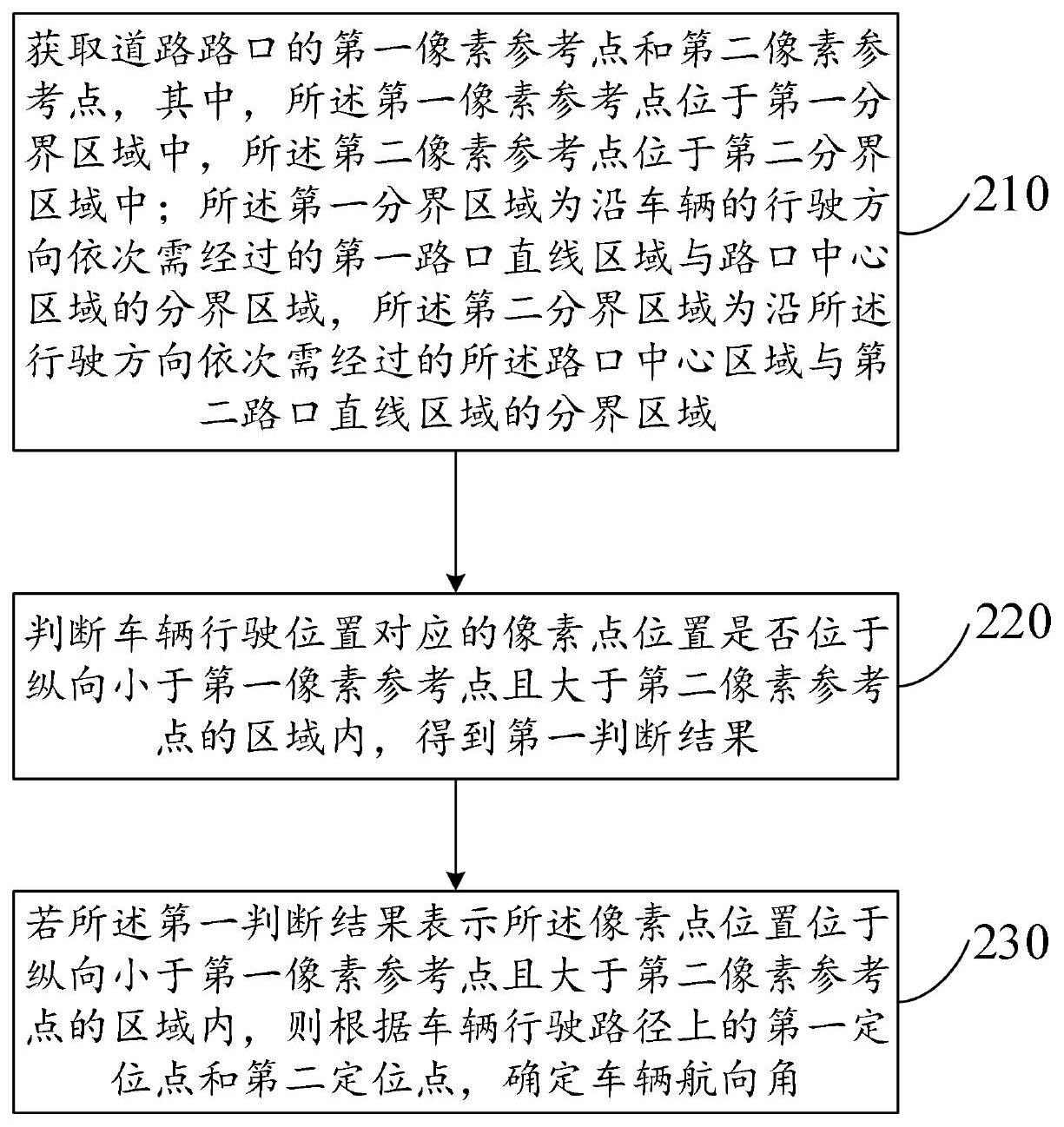
4、获取道路路口的第一像素参考点和第二像素参考点,其中,所述第一像素参考点位于第一分界区域中,所述第二像素参考点位于第二分界区域中;所述第一分界区域为沿车辆的行驶方向依次需经过的第一路口直线区域与路口中心区域的分界区域,所述第二分界区域为沿所述行驶方向依次需经过的所述路口中心区域与第二路口直线区域的分界区域;
5、判断车辆行驶位置对应的像素点位置是否位于纵向小于第一像素参考点且大于第二像素参考点的区域内,得到第一判断结果;
6、若所述第一判断结果表示所述像素点位置位于纵向小于第一像素参考点且大于第二像素参考点的区域内,则根据车辆行驶路径上的第一定位点和第二定位点,确定车辆航向角。
7、本说明书实施例提供的一种车辆航向角的确定装置,包括:
8、获取模块:获取道路路口的第一像素参考点和第二像素参考点,其中,所述第一像素参考点位于第一分界区域中,所述第二像素参考点位于第二分界区域中;所述第一分界区域为沿车辆的行驶方向依次需经过的第一路口直线区域与路口中心区域的分界区域,所述第二分界区域为沿所述行驶方向依次需经过的所述路口中心区域与第二路口直线区域的分界区域;
9、判断模块:判断车辆行驶位置对应的像素点位置是否位于纵向小于第一像素参考点且大于第二像素参考点的区域内,得到第一判断结果;
10、确定模块:若所述第一判断结果表示所述像素点位置位于纵向小于第一像素参考点且大于第二像素参考点的区域内,则根据车辆行驶路径上的第一定位点和第二定位点,确定车辆航向角。
11、本说明书实施例提供的一种车辆航向角的确定设备,包括:
12、至少一个处理器;以及,
13、与所述至少一个处理器通信连接的存储器;其中,
14、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
15、获取道路路口的第一像素参考点和第二像素参考点,其中,所述第一像素参考点位于第一分界区域中,所述第二像素参考点位于第二分界区域中;所述第一分界区域为沿车辆的行驶方向依次需经过的第一路口直线区域与路口中心区域的分界区域,所述第二分界区域为沿所述行驶方向依次需经过的所述路口中心区域与第二路口直线区域的分界区域;
16、判断车辆行驶位置对应的像素点位置是否位于纵向小于第一像素参考点且大于第二像素参考点的区域内,得到第一判断结果;
17、若所述第一判断结果表示所述像素点位置位于纵向小于第一像素参考点且大于第二像素参考点的区域内,则根据车辆行驶路径上的第一定位点和第二定位点,确定车辆航向角。
18、本说明书一个实施例实现了能够达到以下有益效果:获取道路路口的第一像素参考点和第二像素参考点,其中,所述第一像素参考点位于第一分界区域中,所述第二像素参考点位于第二分界区域中;所述第一分界区域为沿车辆的行驶方向依次需经过的第一路口直线区域与路口中心区域的分界区域,所述第二分界区域为沿所述行驶方向依次需经过的所述路口中心区域与第二路口直线区域的分界区域;判断车辆行驶位置对应的像素点位置是否位于纵向小于第一像素参考点且大于第二像素参考点的区域内,得到第一判断结果;若所述第一判断结果表示所述像素点位置位于纵向小于第一像素参考点且大于第二像素参考点的区域内,则根据车辆行驶路径上的第一定位点和第二定位点,确定车辆航向角。在不采用激光雷达的前提下,将道路路口划分为路口直线区域和路口中心区域,当车辆行驶位置位于路口中心区域时,根据车辆行驶路径上的两个坐标点,确定车辆航向角,实现复杂的道路场景(例如:十字路口)下,也能精确确定车辆航向角的技术效果。
技术特征:
1.一种车辆航向角的确定方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述根据车辆行驶路径上的第一定位点和第二定位点,确定车辆航向角,具体包括:
3.如权利要求1所述的方法,其特征在于,所述方法还包括:
4.如权利要求1所述的方法,其特征在于,所述获取道路路口的第一像素参考点和第二像素参考点之前,还包括:
5.如权利要求1所述的方法,其特征在于,所述判断车辆行驶位置对应的像素点位置是否位于纵向小于第一像素参考点且大于第二像素参考点的区域内,得到第一判断结果之前,还包括:
6.如权利要求1所述的方法,其特征在于,所述方法还包括:
7.如权利要求6所述的方法,其特征在于,所述预设角度为30度。
8.一种车辆航向角的确定装置,其特征在于,包括:
9.一种车辆航向角的确定设备,其特征在于,包括:
技术总结
本说明书实施例公开了一种车辆航向角的确定方法、装置及设备。方法包括:获取道路路口的第一像素参考点和第二像素参考点,其中,所述第一像素参考点位于第一分界区域中,所述第二像素参考点位于第二分界区域中;所述第一分界区域为沿车辆的行驶方向依次需经过的第一路口直线区域与路口中心区域的分界区域,所述第二分界区域为沿所述行驶方向依次需经过的所述路口中心区域与第二路口直线区域的分界区域;判断车辆行驶位置对应的像素点位置是否位于纵向小于第一像素参考点且大于第二像素参考点的区域内,得到第一判断结果;若所述第一判断结果表示所述像素点位置位于纵向小于第一像素参考点且大于第二像素参考点的区域内,则根据车辆行驶路径上的第一定位点和第二定位点,确定车辆航向角。
技术研发人员:裴志强
受保护的技术使用者:云控智行科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!