制动系统
本发明涉及车辆制动,尤其是涉及一种制动系统。
背景技术:
1、自动驾驶的安全性要求制动系统在存在一处失效时车辆仍具有制动能力,在自动驾驶工况下若控制主动建压的部分出现故障,则车辆的制动能力则会完全丧失,因此在自动驾驶的车辆上通常要求有两个能独立通过电子控制建立压力的建压单元,当一者损坏时,通常需要另一者的介入保证制动压力,该功能称为冗余制动功能。例如一种在现有的制动系统上并联柱塞泵和电磁阀的构型可实现冗余制动功能。现有的实现冗余制动功能的方式通常需要在液压回路内增加电磁阀或其他的回路切换装置,该方式直接导致系统的成本增高。
2、制动脚感指踏板行程和力的对应关系,在驾驶员舒适驾驶时更倾向于软的制动脚感,而在激烈驾驶时则倾向于硬的制动脚感,制动脚感可调会给驾驶员更好的驾驶感受。现有的机械式的踏板感觉模拟器的特性曲线在出厂时即确定,无法在车上根据驾驶员的需求调节。
3、目前出现的电机驱动的模拟器只能在模拟器所连接的单个制动回路上建立制动压力。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种制动系统,能够实现脚感调节、冗余制动和主动制动功能,成本低,且在主动制动模式下具有建压速度快、补液速度快的优点,可以在两个制动回路都建立制动压力。
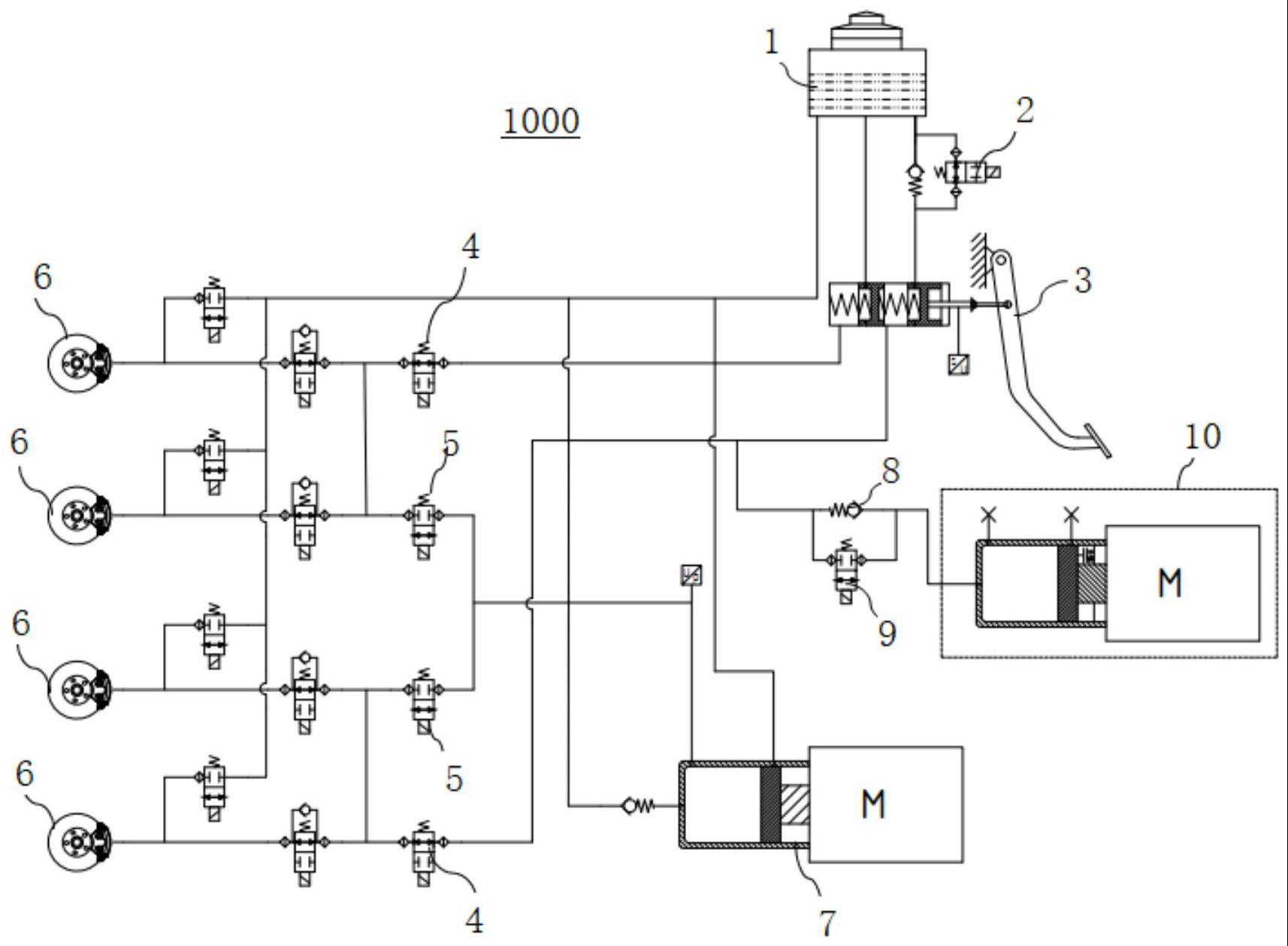
2、根据本发明实施例的制动系统,包括油壶、诊断阀、踏板单元、踏板解耦阀、电缸解耦阀、车轮、建压单元、第一单向阀、模拟器阀和模拟器;所述油壶、所述诊断阀、所述踏板单元、所述踏板解耦阀、所述电缸解耦阀、所述车轮、所述建压单元、所述第一单向阀和所述模拟器阀按照原有制动系统中的连接方式相连;所述模拟器为活塞式的模拟器,所述模拟器与所述踏板单元的主缸一腔出油口相连;
3、所述制动系统的工作模式包括脚感调节模式、备份制动模式和主动制动模式;
4、其中,所述脚感调节模式为:在所述脚感调节模式下,所述踏板单元的踏板被踩踏,所述踏板被踩踏时的产生的制动压力输入到所述模拟器,通过所述模拟器调节制动脚感;同时,所述建压单元向所述车轮提供制动压力;
5、所述备份制动模式为:在所述备份制动模式下,所述建压单元不向所述车轮提供制动压力,所述模拟器向所述车轮提供制动压力,所述踏板被踩踏或不被踩踏;
6、所述主动制动模式为:在所述主动制动模式下,所述模拟器和所述建压单元共同向所述车轮提供制动压力。
7、本发明实施例的制动系统,通过设置活塞式的模拟器,在脚感调节模式下通过实时调节模拟器端的压力使得制动脚感可根据驾驶员的需求调节并通过建压单元向车轮提供制动压力,在备份制动模式下,通过模拟器向车轮提供制动压力,实现了一种不需要在自动系统内增加电磁阀而实现冗余制动功能的形式,该形式成本低,且在主动制动模式下具有建压速度快、补液速度快的优点,且可以在两个制动回路都建立制动压力。
8、在一些实施例中,所述模拟器为第一模拟器,所述第一模拟器包括:
9、第一缸套,所述第一缸套的右端具有敞口,所述第一缸套的左端设有第一模拟器孔,所述第一模拟器孔与所述主缸一腔出油口相连;
10、第一活塞,所述第一活塞可移动地设置在所述第一缸套内,所述第一活塞至所述第一缸套的左端之间的空间为模拟器腔体;
11、第一电机,所述第一电机通过丝杠组件与所述第一活塞相连,以驱动所述第一活塞左右移动;所述第一电机能够正向和反向的自由旋转,所述丝杠组件为非自锁形式;
12、第一弹簧阻尼元件,所述第一弹簧阻尼元件设置在所述第一活塞的右侧且不与所述第一活塞直接相连,当所述丝杠组件自特定位置向左移动时,所述第一活塞与所述第一弹簧阻尼元件分离,当所述丝杠组件自特定位置向右移动时,所述第一弹簧阻尼元件被压缩以在所述第一活塞上提供向左的力,从而保证所述第一模拟器在建压时不会受所述第一弹簧阻尼元件的影响,而在脚感模拟时,所述第一弹簧阻尼元件能提供脚感。
13、在一些实施例中,所述诊断阀未通电时,所述踏板单元的主缸一腔入油口与所述油壶连接,所述诊断阀通电时,所述主缸一腔入油口与所述油壶截断;所述第一模拟器的受力通过所述第一电机控制调节;在未控制所述第一电机时,所述第一活塞的自由运动不会受所述第一电机影响。
14、在一些实施例中,所述脚感调节模式具体为:当所述踏板被踩下时,ecu感知到所述踏板被踩下,此时所述ecu控制所述踏板解耦阀、所述电缸解耦阀均通电,使所述踏板解耦阀处于切换为闭合状态,所述电缸解耦阀切换为打开状态;同时所述ecu控制所述模拟器阀通电,所述模拟器阀切换为打开状态;此时由于连接于所述踏板单元的主缸二腔出油口处的第一管路被截断,故所述踏板单元的主缸二腔内的液体无法发生流动,致使所述踏板单元的主缸二腔活塞不会发生位移;由于所述模拟器阀为打开状态,故连接于所述第一模拟器的第二管路与所述模拟器腔体直接相连,通过调节所述第一电机的扭矩则可以调节所述模拟器腔体内的不同压力,实现不同的制动脚感;同时所述ecu控制所述建压单元建压,在所述车轮处产生制动压力;
15、所述备份制动模式具体为:当所述建压单元失效无法提供制动压力时,所述ecu控制所述诊断阀通电,所述诊断阀切换断开状态,使所述踏板单元的主缸一腔入油口与所述油壶的连接通道截断;同时所述ecu控制所述踏板解耦阀断电、所述电缸解耦阀断电,使所述踏板解耦阀处于连通状态、所述电缸解耦阀处于截断状态;同时所述ecu控制所述第一电机旋转,所述第一活塞在所述第一电机的带动下向左移动,所述模拟器腔体的液体经过所述第一单向阀、所述第二管路到达所述踏板解耦阀,并直接到达两个所述车轮,在两个所述车轮处产生制动压力;此时所述第二管路内也具有压力,导致所述踏板单元的主缸一腔也产生了制动压力,由于所述诊断阀处于截断状态,所述主缸一腔的制动压力并不会经过所述诊断阀卸载,在所述主缸一腔的制动压力的作用下,所述主缸二腔活塞向左移动,所述主缸二腔内的液体在所述主缸二腔活塞的作用下到达所述踏板解耦阀,并直接到达另两个所述车轮,在另两个所述车轮处产生制动压力;
16、所述主动制动模式具体为:当所述踏板未被踩踏时,所述ecu控制所述踏板解耦阀断电、所述电缸解耦阀通电,使所述踏板解耦阀处于连通状态、所述电缸解耦阀处于连通状态;同时所述ecu控制所述诊断阀通电,使所述诊断阀切换断开状态,将所述主缸一腔入油口与所述油壶的连接通道截断;同时所述ecu控制所述建压单元的电机旋转来带动所述建压单元的活塞向左移动及控制所述模拟器的所述第一电机旋转来带动所述第一活塞向左移动,使所述建压单元内和所述模拟器内的液体经过液压管路到达轮缸,在所述车轮处产生制动压力。
17、在一些实施例中,在所述主动制动模式中,还可以通过不对所述诊断阀和所述第一电机进行操作来取消所述模拟器建压。
18、在一些实施例中,使用所述电机调节不同脚感的实现方式包括如下步骤:
19、s1:将表征脚感的踏板力-位移曲线转化为模拟器腔体压力-第一活塞位移的曲线;
20、s2:通过调整所述弹簧阻尼元件的刚度、阻尼、预压力实现不同的模拟器腔体压力-第一活塞位移原始曲线,当需要获得不同的脚感时,对于目标的脚感经过步骤s1得到不同的模拟器腔体压力-第一活塞位移目标曲线;
21、s3:将模拟器腔体压力-第一活塞位移目标曲线减去模拟器腔体压力-第一活塞位移原始曲线,得到所述第一电机需要提供的压力曲线;此时所述第一电机的扭矩则计算为t=p*asim*dmot,其中,p为所述第一电机需要提供的压力曲线;asim为所述第一活塞的横截面积,dmot为所述丝杠组件的导程。
22、在一些实施例中,所述模拟器为第二模拟器,所述第二模拟器包括:
23、第二缸套,所述第二缸套的左端设有第二模拟器孔,所述第二模拟器孔与所述主缸一腔出油口相连;
24、第二活塞,所述第二活塞可左右移动地设置在所述第二缸套内,所述第二活塞和所述第二缸套之间构成左侧空间和右侧空间,所述左侧空间与所述第二模拟器孔连通;
25、第二弹簧阻尼元件,所述第二弹簧阻尼元件设置在所述右侧空间中;
26、泵元件,所述泵元件的出口与所述右侧空间连接;
27、储液罐,所述储液罐与所述泵元件的入口连接;
28、电磁阀,所述电磁阀的两端与所述泵元件的两端并联;所述电磁阀为线性调控阀;
29、所述第二模拟器的工作原理为:当需要调节所述右侧空间内的压力时,通过控制所述泵元件旋转,所述泵元件从所述储液罐抽取液体至所述泵元件的出口,通过给所述电磁阀施加不同的电流则可以控制所述右侧空间内的压力,当所述电磁阀的电流越大时,所述右侧空间内压力也越大;
30、所述第二模拟器使得所述制动系统能够实现所述脚感调节模式、所述备份制动模式和所述主动制动模式。
31、在一些实施例中,所述模拟器为第三模拟器,所述第三模拟器为在所述第二模拟器的基础上在所述第二活塞上增加第二单向阀;其中,所述第二单向阀的入口与所述右侧空间相连,所述第二单向阀的出口与所述左侧空间相连,所述第二单向阀使得液体可以从所述右侧空间流向所述左侧空间,反之则截止;
32、所述第三模拟器通过增加所述第二单向阀,使得所述制动系统不具有所述脚感调节模式,但仍然具有所述备份制动模式和所述主动制动模式。
33、在一些实施例中,所述模拟器为第四模拟器,所述第四模拟器为在所述第二模拟器的基础上,将所述泵元件的出口与所述左侧空间相连;所述第四模拟器使得所述制动系统仍然具有所述脚感调节模式、所述备份制动模式和所述主动制动模式。
34、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!