一种新能源电动汽车自动驻坡方法与流程
本发明涉及新能源电动车,具体为一种新能源电动汽车自动驻坡方法。
背景技术:
1、汽车工业的快速发展,在给人们带来很多便利,但石油资源日益减少且不可再生,环境污染日益加重。中国电力资源丰富,在国家大力倡导下,出台了一系列鼓励和推广新能源汽车发展的政策,新能源电动汽车技术迅速发展。
2、随着社会的快速发展,道路上各类车辆越来越多,造成道路拥挤,给车辆的行驶带来各种困难。电动汽车采用电机驱动,其不会像传统发动机一样保持怠速,尤其是车辆在坡道上时,容易发生坡道停车和起步时溜坡的情况,对驾驶员的操作要求较高,安全性差。在此基础上,电动车辆的自动驻坡策略应运而生。
技术实现思路
1、本发明的目的在于提供一种新能源电动汽车自动驻坡方法,解决背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种新能源电动汽车自动驻坡方法,包括下列步骤:
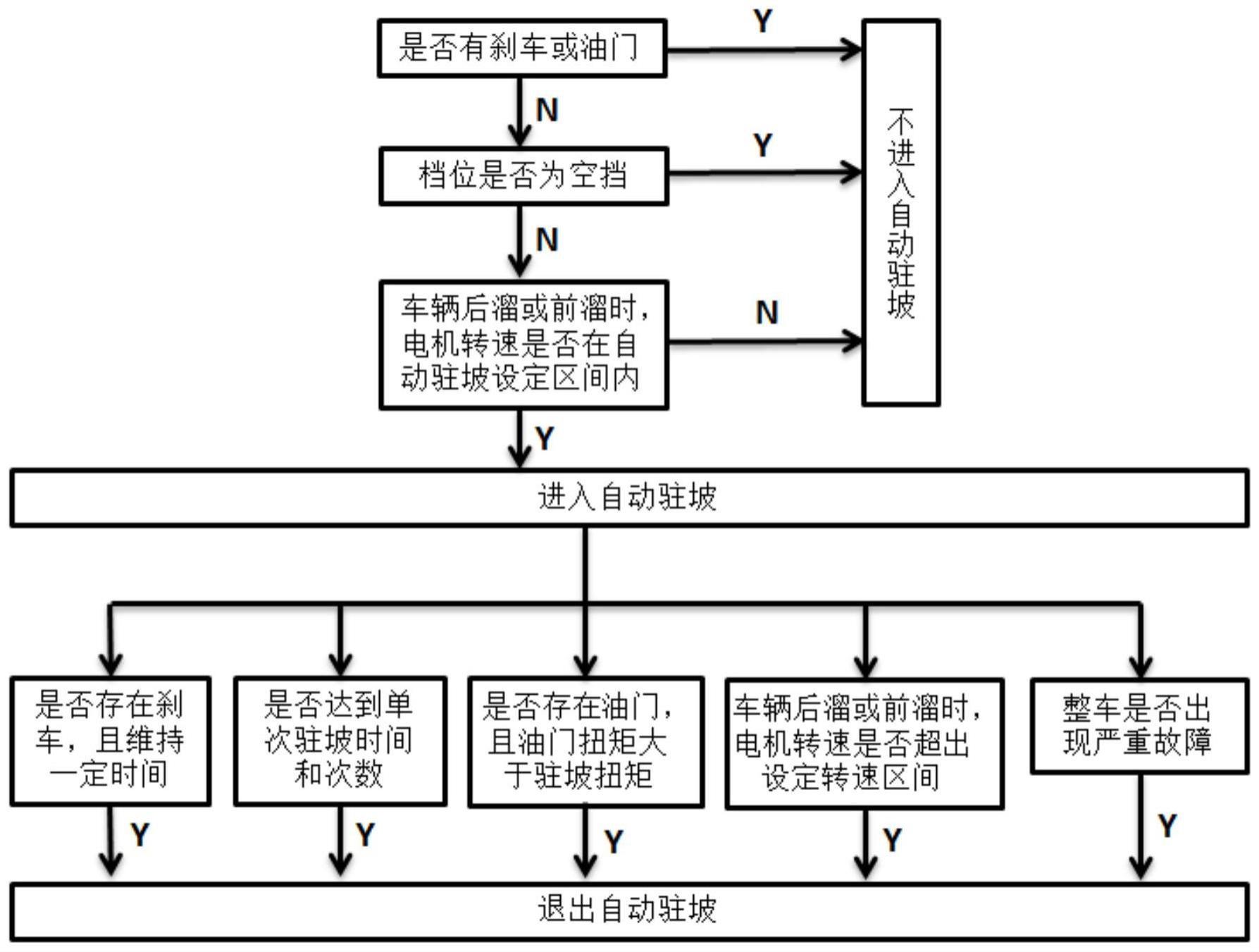
4、(1)进入自动驻坡:
5、当车辆在前进挡,无刹车信号,且电机转速在-180rpm~-20rpm时;
6、或者当车辆在后退挡,无刹车信号,且电机转速在20rpm~180rpm时;
7、vcu直接向mcu发送驻坡指令为1,mcu接收到此命令后,进入转速控制,pi调节输出驻坡扭矩,车辆进入自动驻坡;
8、(2)退出自动驻坡:
9、当vcu加速踏板计算出的给定扭矩大于mcu反馈的驻坡扭矩,或存在刹车信号时,vcu发出退出驻坡指令为0;
10、在前进挡时,当电机转速小于-280rpm或大于40rpm时,将退出自动驻坡,vcu发出退出驻坡指令为0;
11、在后退档时,当电机转速大于280rpm或小于-40rpm,将退出自动驻坡,vcu发出退出驻坡指令为0;
12、退出驻坡模式后,vcu向mcu发送驻坡指令为0;
13、当在前进挡,电机转速小于-280rpm退出驻坡时;
14、或在后退档,电机转速大于280rpm退出驻坡时,vcu此时会将档位切换为空档,并向mcu发送回馈扭矩请求;
15、vcu在确认mcu进入驻坡状态5秒,退出驻坡,vcu向mcu发送驻坡指令为0,一段延迟后,再次进入驻坡,vcu向mcu发送驻坡指令为1,多次驻坡后,完全退出驻坡。
16、进一步,所示步骤(2)中,延迟时间为20ms。
17、进一步,多次驻坡次数为3次。
18、进一步,所述步骤(1)中,当车辆正处于刹车状态、车辆加速踏板有开度信号时或车辆处于空挡时,不主动进入驻坡。
19、进一步,车辆在前进挡,电机转速不在-180rpm~-20rpm区间时,车辆在后退挡,电机转速不在20rpm~180rpm区间时,不主动进入驻坡。
20、进一步,所述步骤(2)中,在驻坡状态下,车辆重新进入刹车状态,并维持1秒时,在已进入驻坡时会主动退出驻坡;
21、当车辆加速踏板有开度信号,且vcu请求扭矩大于驻坡扭矩时,在已进入驻坡时会主动退出驻坡;
22、在驻坡状态下,发生档位切换时,在已进入驻坡时会主动退出驻坡。
23、进一步,所述步骤(2)中,当未主动退出驻坡时,车辆单次驻坡时间达到5秒,且连续驻坡次数达到3次时,在已进入驻坡时会主动退出驻坡。
24、进一步,所述步骤(2)中,当车辆在前进挡,电机转速小于-280rpm或大于40rpm时,在已进入驻坡时会主动退出驻坡;
25、当车辆在后退挡,电机转速大于280rpm或小于-40rpm时,在已进入驻坡时会主动退出驻坡。
26、与现有技术相比,本发明的有益效果是:
27、无需额外的装置进行车辆倾斜角度来辅助进行驻坡功能判定,仅车辆本身的换挡器,加速踏板,制动踏板,驱动电机,电机控制器,整车控制器等电器件和机械硬件即可实现自动驻坡功能,降低了实现自动驻坡功能的成本;
28、自动驻坡的单次5秒和共3次时间退出驻坡设定,可避免长时间驻坡造成驱动电机、电机控制器等关键器件的堵转过温损坏问题,同时可及时提醒驾驶员车辆正在溜坡,让驾驶员及时介入车辆控制,规避行车安全隐患;
29、此方案的功能实现快速简洁,缩短了驻坡的溜坡距离、降低了溜坡速度、具备良好的保护功能,提升了驾乘体验,减少了驾驶安全隐患。
技术特征:
1.一种新能源电动汽车自动驻坡方法,其特征在于,包括下列步骤:
2.如权利要求1所述的一种新能源电动汽车自动驻坡方法,其特征在于,所示步骤(2)中,延迟时间为20ms。
3.如权利要求1所述的一种新能源电动汽车自动驻坡方法,其特征在于,多次驻坡次数为3次。
4.如权利要求1所述的一种新能源电动汽车自动驻坡方法,其特征在于,所述步骤(1)中,当车辆正处于刹车状态、车辆加速踏板有开度信号时或车辆处于空挡时,不主动进入驻坡。
5.如权利要求1所述的一种新能源电动汽车自动驻坡方法,其特征在于,车辆在前进挡,电机转速不在-180rpm~-20rpm区间时,车辆在后退挡,电机转速不在20rpm~180rpm区间时,不主动进入驻坡。
6.如权利要求1所述的一种新能源电动汽车自动驻坡方法,其特征在于,所述步骤(2)中,在驻坡状态下,车辆重新进入刹车状态,并维持1秒时,在已进入驻坡时会主动退出驻坡;
7.如权利要求1所述的一种新能源电动汽车自动驻坡方法,其特征在于,所述步骤(2)中,当未主动退出驻坡时,车辆单次驻坡时间达到5秒,且连续驻坡次数达到3次时,在已进入驻坡时会主动退出驻坡。
8.如权利要求1所述的一种新能源电动汽车自动驻坡方法,其特征在于,所述步骤(2)中,当车辆在前进挡,电机转速小于-280rpm或大于40rpm时,在已进入驻坡时会主动退出驻坡;
技术总结
本发明公开了一种新能源电动汽车自动驻坡方法,包括下列步骤:(1)进入自动驻坡:当车辆在前进挡,无刹车信号,且电机转速在‑180rpm~‑20rpm时;或者当车辆在后退挡,无刹车信号,且电机转速在20rpm~180rpm时;VCU直接向MCU发送驻坡指令为1,MCU接收到此命令后,进入转速控制,PI调节输出驻坡扭矩,车辆进入自动驻坡。本发明无需额外的装置进行车辆倾斜角度来辅助进行驻坡功能判定,仅车辆本身的换挡器,加速踏板,制动踏板,驱动电机,电机控制器,整车控制器等电器件和机械硬件即可实现自动驻坡功能,降低了实现自动驻坡功能的成本。
技术研发人员:龚爵,杨作身,倪旭,苌云柱,褚帅,钱建军,李兆立
受保护的技术使用者:江苏金致新能源车业有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!