一种无人车自动制动系统性能的测试方法和装置
本发明涉及无人车测试,尤其涉及一种无人车自动制动系统性能的测试方法和装置。
背景技术:
1、随着功能型无人车的出现及发展,涉及到很多自动化控制系统,实现汽车代替人的自动驾驶无人车,如末端配送物流车取消驾驶仓,车内无方向盘、油门踏板、制动踏板等执行器。无人车的主动安全受到更多关注,自动制动系统属于自动驾驶系统的一部分,在无人车前方出现障碍物可能会发生碰撞时,无人车制动系统能利用传感器探测到前方障碍物与本车距离,根据当前车速计算安全距离,在本车于障碍物之间的距离小于安全距离时,自动制动系统启动,通过制动的方式使车辆减速,避免无人车发生碰撞。
2、因此,为了提高自动制动系统的安全性,亟需一种能够对自动制动系统进行性能测试的方法。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种无人车自动制动系统性能的测试方法和装置。
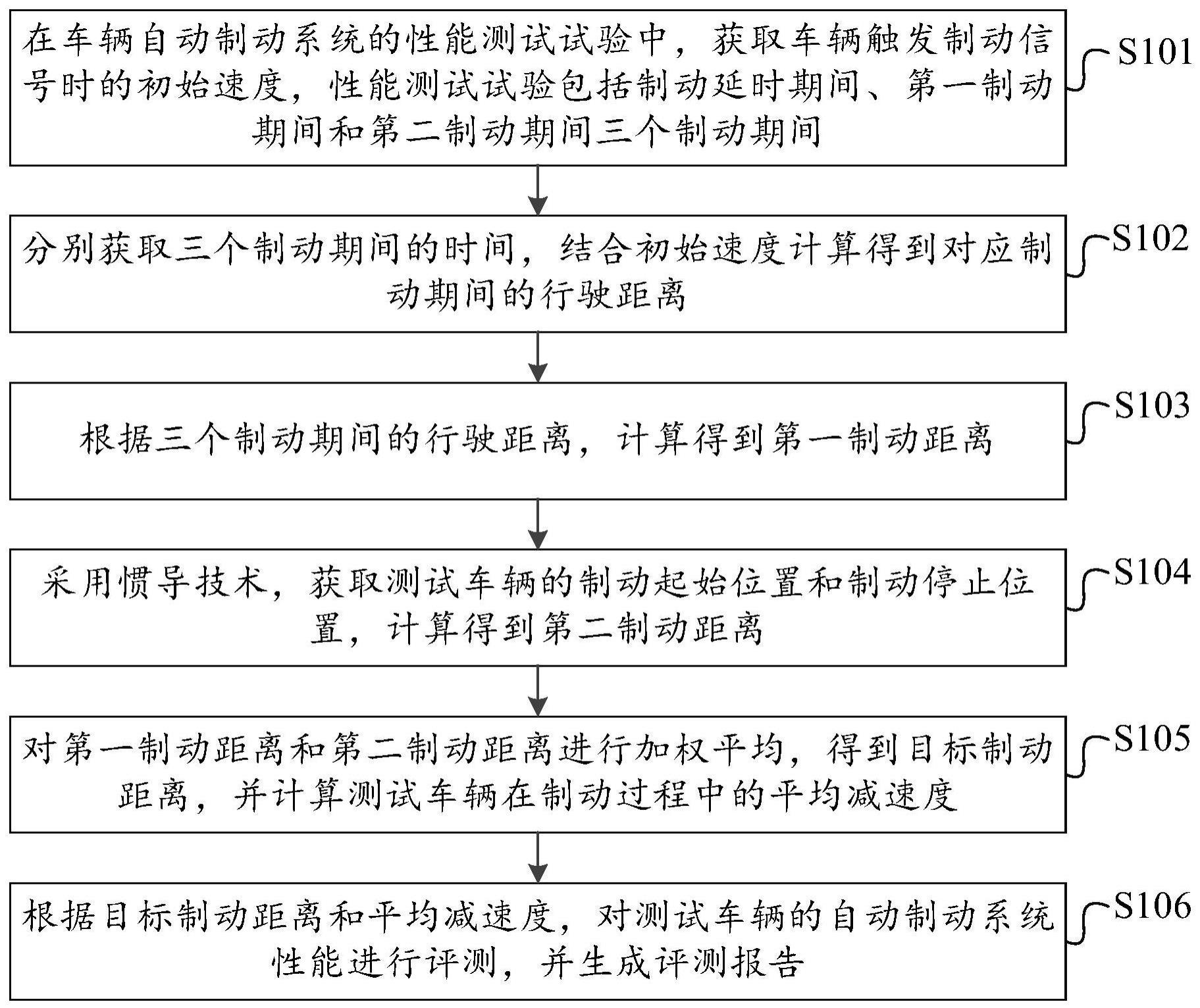
2、一种无人车自动制动系统性能的测试方法,包括以下步骤:在车辆自动制动系统的性能测试试验中,获取测试车辆触发制动信号时的初始速度,所述性能测试试验包括制动延时期间、第一制动期间和第二制动期间三个制动期间;分别获取所述三个制动期间的时间,结合所述初始速度计算得到对应制动期间的行驶距离;根据所述三个制动期间的行驶距离,计算得到第一制动距离;采用惯导技术,获取测试车辆的制动起始位置和制动停止位置,计算得到第二制动距离;对第一制动距离和第二制动距离进行加权平均,得到目标制动距离,并计算所述测试车辆在制动过程中的平均减速度;根据所述目标制动距离和平均减速度,对测试车辆的自动制动系统性能进行评测,并生成评测报告。
3、在其中一个实施例中,所述获取测试车辆触发制动信号时的初始速度之前,还包括:通过标定天线标定测试车辆的轮廓,接收并解析所述测试车辆的gps信号,获取测试车辆的can信号、定位数据位置、速度、加速度、纵向加速度变化曲率的运动信息;根据所述gps信号判断测试车辆是否触发制动信号;在所述测试车辆触发制动信号时,获取初始速度。
4、在其中一个实施例中,所述分别获取所述三个制动期间的时间,结合所述初始速度计算得到对应制动期间的行驶距离,包括:在所述制动延时期间,获取测试车辆的延时时间,结合所述初始速度计算得到延时距离;在所述第一制动期间,所述测试车辆的减速度增大到最大目标减速度,获取第一制动时间,结合所述初始速度、最大目标减速度和第一制动时间,计算得到第一行驶距离和测试车辆达到最大目标减速度时的瞬时速度;在所述第二制动期间,所述测试车辆的减速度缩小到0,制动结束车辆停止,获取第二制动时间,结合瞬时速度,计算得到第二行驶距离。
5、在其中一个实施例中,所述在所述制动延时期间,获取测试车辆的延时时间,结合所述初始速度计算得到延时距离,包括:接收到制动信号后,获取接收到制动信号到制动力开始增加的延时时间;结合所述初始速度,计算得到所述测试车辆的延时距离,公式为:
6、d1=vb·ta (1)
7、式中,vb为初始速度,ta为延时时间。
8、在其中一个实施例中,所述在所述第一制动期间,所述测试车辆的减速度增大到最大目标减速度,获取第一制动时间,结合所述初始速度、最大目标减速度和第一制动时间,计算得到第一行驶距离和测试车辆达到最大目标减速度时的瞬时速度,包括:在测试车辆开始制动时,获取所述测试车辆的最大目标减速度,及制动力从开始增加到达到最大制动力所经历的第一制动时间;假设经历制动时间t后的瞬时车速为vt,则有
9、
10、式中,a0为最大目标减速度,ts为第一制动时间;则ts时间内加速度为:
11、
12、减速时,为负值,ts时间内所述测试车辆的速度为:
13、
14、则ts时间内测试车辆开始制动到最大目标减速度前的第一行驶距离为:
15、
16、将初始车速作为车辆减速度开始增加时的车速,则经过时间ts后,达到最大制动减速度a0后的瞬时车速为:
17、
18、在其中一个实施例中,所述在所述第二制动期间,所述测试车辆的减速度缩小到0,制动结束车辆停止,获取第二制动时间,结合瞬时速度,计算得到第二行驶距离,包括:在第二制动期间,所述测试车辆的减速度从最大目标减速度持续到制动结束,车速由所述瞬时车速降低到vf,则第二制动时间为:
19、
20、根据第二制动时间和瞬时车速,计算测试车辆从最大目标减速度行驶到制动结束的第二行驶距离,为:
21、
22、式中,tv为第二制动时间。
23、在其中一个实施例中,所述根据所述三个制动期间的行驶距离,计算得到第一制动距离,包括:根据所述制动延时距离、第一行驶距离和第二行驶距离,得到测试车辆的第一制动距离,为:
24、
25、在其中一个实施例中,所述对第一制动距离和第二制动距离进行加权平均,得到目标制动距离,公式为:
26、d=daw1+dbw2 (10)
27、式中,w1和w2分别为第一制动距离和第二制动距离的权重。
28、在其中一个实施例中,所述根据所述目标制动距离和平均减速度,对测试车辆的自动制动系统性能进行评测,并生成评测报告,包括:获取预设的制动距离阈值和减速度阈值,分别比较所述目标制动距离和平均减速度与所述制动距离阈值和减速度阈值的关系;在所述目标制动距离小于所述制动距离阈值,且所述平均减速度大于减速度阈值时,认定所述测试车辆的自动制动系统性能合格;将所述目标制动距离和平均减速度及评测结果输入评测模板,生成评测报告。
29、一种无人车自动制动系统性能的测试装置,用于实现如上所述的一种无人车自动制动系统性能的测试方法,包括:初始速度获取模块,用于在车辆自动制动系统的性能测试试验中,获取测试车辆触发制动信号时的初始速度,所述性能测试试验包括制动延时期间、第一制动期间和第二制动期间三个制动期间;行驶距离计算模块,用于分别获取所述三个制动期间的时间,结合所述初始速度计算得到对应制动期间的行驶距离;第一制动距离计算模块,用于根据所述三个制动期间的行驶距离,计算得到第一制动距离;第二制动距离计算模块,用于采用惯导技术,获取测试车辆的制动起始位置和制动停止位置,计算得到第二制动距离;目标制动距离获取模块,用于对第一制动距离和第二制动距离进行加权平均,得到目标制动距离,并计算所述测试车辆在制动过程中的平均减速度;测评报告生成模块,用于根据所述目标制动距离和平均减速度,对测试车辆的自动制动系统性能进行评测,并生成评测报告。
30、相比于现有技术,本发明的优点及有益效果在于:通过在车辆自动测试制动系统的性能测试试验中,获取测试车辆触发制动信号时的初始速度,性能测试试验分为制动延时期间、第一制动期间和第二制动期间三个制动期间,分别获取三个制动期间的时间,结合初始速度计算得到对应制动期间的行驶距离,根据三个制动期间的行驶距离,计算得到第一制动距离,提高对制动距离测量的准确性,同时,采用惯导技术,获取测试车辆的制动起始位置和制动停止位置,计算得到第二制动距离,对第一制动距离和第二制动距离进行加权平均,得到目标制动距离,结合两种制动距离能够降低测量误差对测试结果的不良影响,提高测试结果的精确度,并计算测试车辆在制动过程中的平均减速度,结合目标制动距离和平均减速度对测试车辆的自动制动系统性能进行评测,并生成对应的评测报告,从而实现对无人车自动制动系统性能的精确评测,可靠性高,且能够便于对无人车性能进行查看。
- 还没有人留言评论。精彩留言会获得点赞!