一种车辆侧翻的检测方法、装置、车辆和存储介质与流程
本技术涉及车辆领域,并且更具体地,涉及车辆领域中的一种车辆侧翻的检测方法、装置、车辆和存储介质。
背景技术:
1、随着社会的进步,私家车的使用更加普遍,这样就会存在部分驾驶人员因驾龄较短,遇突发情况处理能力比较差。比如,雨天路滑车辆侧翻,驾驶员不能及时掌握车辆方向会造成危险。并且,转弯时车速过快也容易导致侧翻的风险、货车拉货时也存在侧翻的风险等。
2、目前,在进行车辆的侧翻检测时,通常采用的方式为:增加一些精密的硬件,来机械判断车辆是否侧翻,但该方式需要对原车辆进行较大的硬件改动。
技术实现思路
1、本技术提供了一种车辆侧翻的检测方法、装置、车辆和存储介质,该方法能够在实现车辆侧翻检测的同时,避免对车辆进行较大的硬件改动。
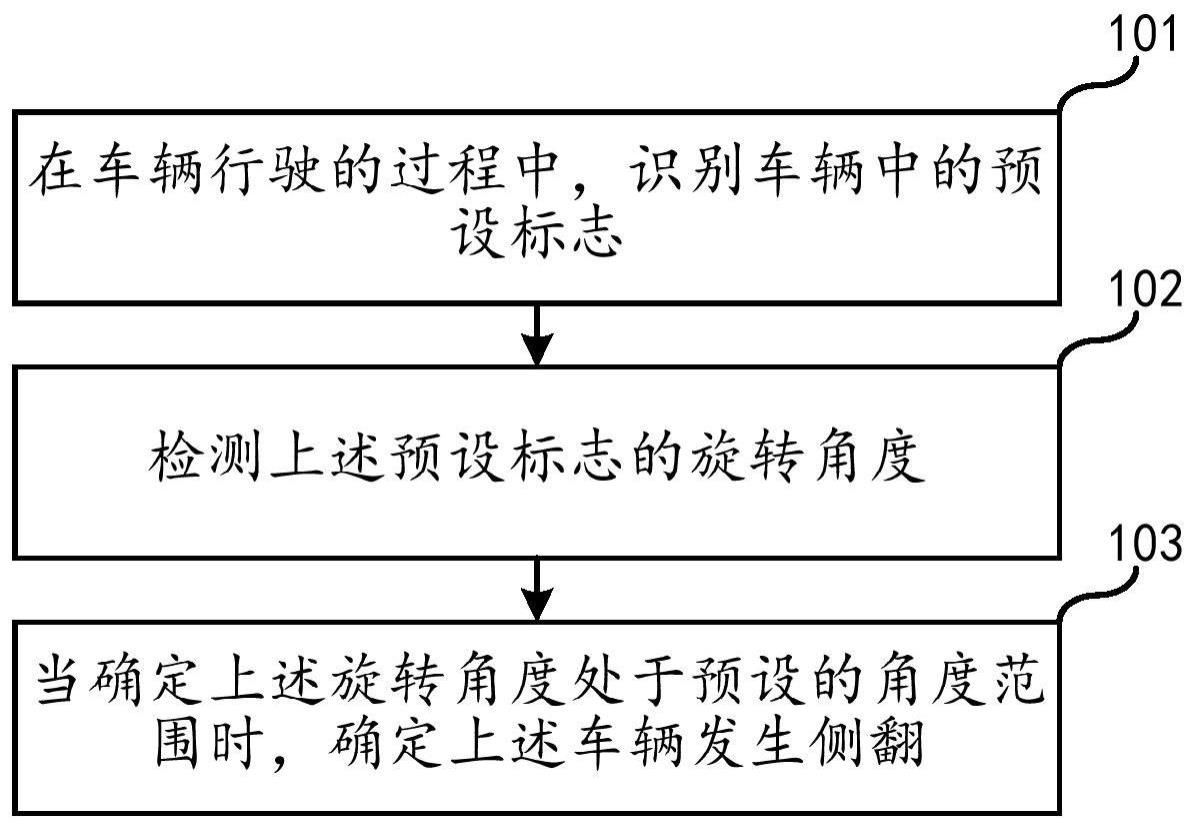
2、第一方面,提供了一种车辆侧翻的检测方法,该方法包括:在车辆行驶的过程中,识别车辆中的预设标志;检测上述预设标志的旋转角度;当确定上述旋转角度处于预设的角度范围时,确定上述车辆发生侧翻。
3、在上述技术方案中,通过在车辆行驶的过程中,识别车辆中的预设标志,并检测该预设标志的旋转角度。从而,当旋转角度处于预设的角度范围时,确定车辆发生侧翻。也就是说,上述技术方案中在进行车辆的侧翻检测时,是通过车辆中的预设标志的旋转角度进行是否侧翻的判断,而无需增加精密的硬件来机械的判断车辆是否侧翻,因此,可以避免对原车辆进行较大的硬件改动,从而有利于避免硬件成本的增加。
4、结合第一方面,在某些可能的实现方式中,上述预设标志设置在上述车辆的目标位置,上述在上述车辆行驶的过程中,识别车辆中的预设标志,包括:在上述车辆行驶的过程中,获取摄像装置拍摄的上述目标位置的图像;根据上述图像,识别上述车辆中的上述预设标志。
5、在上述技术方案中,结合摄像装置拍摄的目标位置的图像,可以方便且准确的识别出车辆中的预设标志。
6、结合第一方面和上述实现方式,在某些可能的实现方式中,上述预设标志的形状为多边形,上述检测上述预设标志的旋转角度,包括:从上述摄像装置拍摄的上述目标位置的图像中识别出上述预设标志的参考边所在的第一直线;确定上述车辆处于启动状态时,上述预设标志的参考边所在的第二直线;根据上述第一直线和上述第二直线的夹角,确定上述旋转角度。
7、在上述技术方案中,由于预设标志的形状为多边形,从而使得预设标志本身具备明显的数学特性。从车辆处于启动状态到车辆在行驶过程中,第一直线和第二直线可以相对准确的衡量预设标志的参考边所处位置的变化,因此,第一直线和第二直线的夹角可以相对准确的衡量旋转角度。上述技术方案中,可以相对容易的结合预设标志的数学特性准确得到旋转角度,从而有利于提高侧翻检测的准确性。
8、结合第一方面和上述实现方式,在某些可能的实现方式中,上述预设标志的参考边的颜色为第一颜色,上述预设标志的非参考边的颜色为第二颜色,上述第一颜色和上述第二颜色不同,上述非参考边包括上述预设标志中除上述参考边之外的边。
9、在上述技术方案中,预设标志的参考边的颜色和非参考边的颜色不同,使得可以基于颜色特征,相对容易的识别出预设标志的参考边,从而可以加快参考的识别速度,进而加快旋转角度的检测速度,以加快侧翻检测的速度。
10、结合第一方面和上述实现方式,在某些可能的实现方式中,上述从上述摄像装置拍摄的上述目标位置的图像中识别出上述预设标志的参考边所在的第一直线,包括:确定上述图像中上述预设标志所在区域的各像素点的像素值;根据上述各像素点的像素值和上述第一颜色对应的像素值范围,从上述图像中识别出上述预设标志的参考边所在的第一直线。
11、结合第一方面和上述实现方式,在某些可能的实现方式中,上述第一直线和上述第二直线的夹角包括第一角度和第二角度,上述根据上述第一直线和上述第二直线的夹角,确定上述旋转角度,包括:将上述第一角度和第二角度中最小的角度作为上述旋转角度。
12、结合第一方面和上述实现方式,在某些可能的实现方式中,上述预设标志设置在上述车辆的仪表盘中。
13、结合第一方面和上述实现方式,在某些可能的实现方式中,在上述确定上述车辆发生侧翻之后,上述方法还包括:通过调整上述车辆的重心控制上述车辆从侧翻状态恢复到正常状态。
14、在上述技术方案中,在检测到侧翻后,及时调整车辆的重心使得车辆恢复正常状态,从而有利于提高行车安全性。
15、第二方面,提供了一种车辆侧翻的检测装置,该装置包括:识别模块,用于在车辆行驶的过程中,识别上述车辆中的预设标志;检测模块,用于检测上述预设标志的旋转角度;确定模块,用于当确定上述旋转角度处于预设的角度范围时,确定上述车辆发生侧翻。
16、结合第二方面,在某些可能的实现方式中,上述预设标志设置在上述车辆的目标位置,上述识别模块具体用于:在上述车辆行驶的过程中,获取摄像装置拍摄的上述目标位置的图像;根据上述图像,识别上述车辆中的上述预设标志。
17、结合第二方面,在某些可能的实现方式中,上述预设标志的形状为多边形,上述检测模块具体用于:从上述摄像装置拍摄的上述目标位置的图像中识别出上述预设标志的参考边所在的第一直线;确定上述车辆处于启动状态时,上述预设标志的参考边所在的第二直线;根据上述第一直线和上述第二直线的夹角,确定上述旋转角度。
18、结合第二方面,在某些可能的实现方式中,上述预设标志的参考边的颜色为第一颜色,上述预设标志的非参考边的颜色为第二颜色,上述第一颜色和上述第二颜色不同,上述非参考边包括上述预设标志中除上述参考边之外的边。
19、结合第二方面,在某些可能的实现方式中,上述检测模块具体用于:确定上述图像中上述预设标志所在区域的各像素点的像素值;根据上述各像素点的像素值和上述第一颜色对应的像素值范围,从上述图像中识别出上述预设标志的参考边所在的第一直线。
20、结合第二方面,在某些可能的实现方式中,上述第一直线和上述第二直线的夹角包括第一角度和第二角度,上述检测模块具体用于:将上述第一角度和第二角度中最小的角度作为上述旋转角度。
21、结合第二方面,在某些可能的实现方式中,上述预设标志设置在上述车辆的仪表盘中。
22、结合第二方面,在某些可能的实现方式中,上述装置还包括:调整模块,在确定上述车辆发生侧翻之后,上述调整模块用于:通过调整上述车辆的重心控制上述车辆从侧翻状态恢复到正常状态。
23、第三方面,提供一种车辆,包括存储器和处理器。该存储器用于存储可执行程序代码,该处理器用于从存储器中调用并运行该可执行程序代码,使得该车辆执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
24、第四方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
25、第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行上述第一方面或第一方面任意一种可能的实现方式中的方法。
- 还没有人留言评论。精彩留言会获得点赞!