基于无人驾驶技术的四驱越野车及导航系统
本发明涉及无人驾驶,具体为基于无人驾驶技术的四驱越野车及导航系统。
背景技术:
1、国内无人驾驶技术已在城市内得到了蓬勃发展,其主流为基于gps与激光雷达的传感器融合技术,能够实现在限定区域内遵守交通法规的无人驾驶。
2、现有的基于无人驾驶技术的四驱越野车及导航系统在野外环境,缺少各种交通指示标的情况下,如何有效感知周围环境,并做出对应决策是新的难点,目前国内外尚未针对该领域提出具体解决方案,为此,需要设计新的技术方案给予解决。
技术实现思路
1、本发明的目的在于提供基于无人驾驶技术的四驱越野车及导航系统,解决了背景技术中所提出的问题。
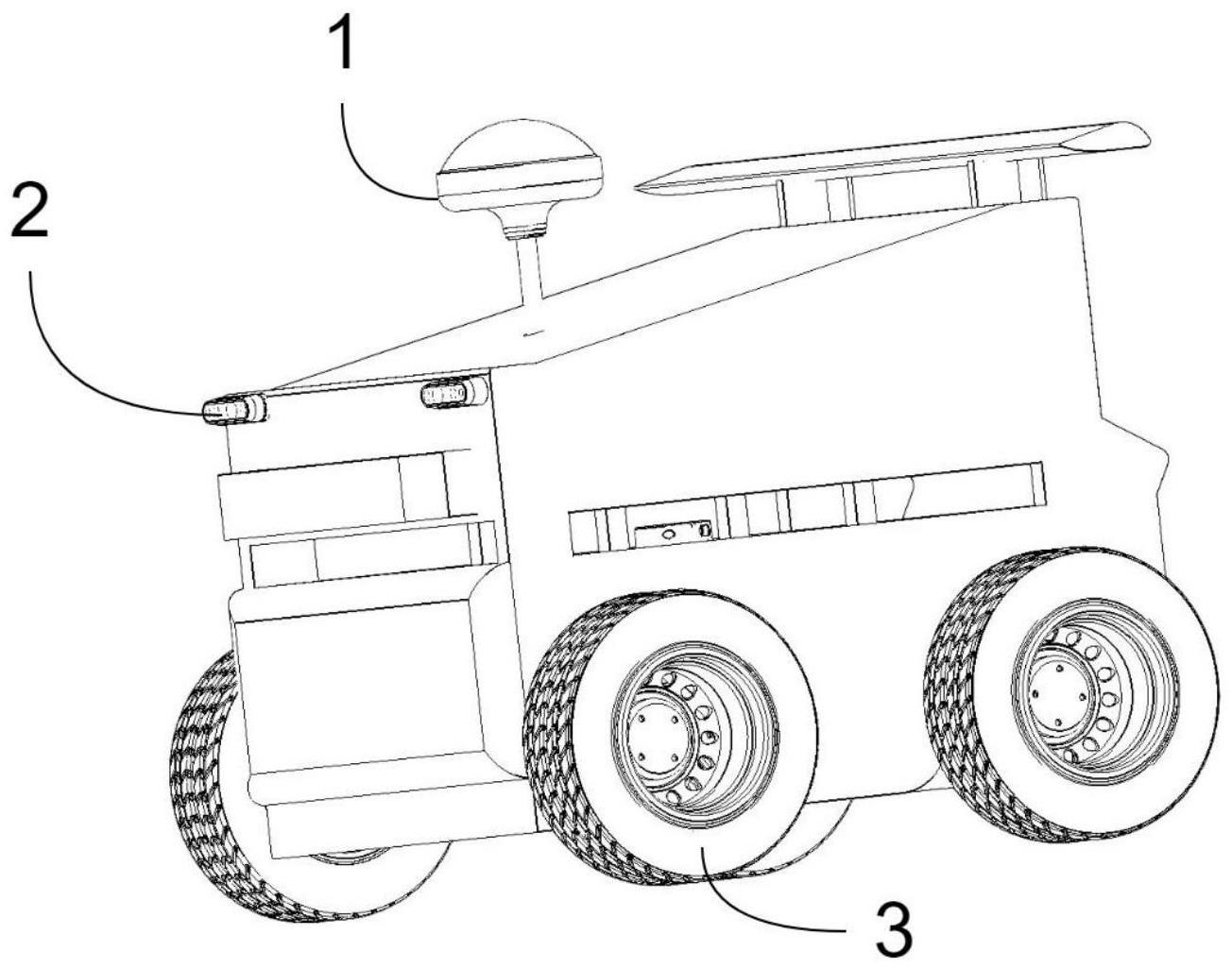
2、为实现上述目的,本发明提供如下技术方案:基于无人驾驶技术的四驱越野车,包括底盘系统和核心硬件安装层,所述底盘系统包括前后轴系统、车架,所述前轴系统和后轴系统位于车体的前后两侧,与车架依靠角钢与船型螺母固定,所述前后轴系统包括悬架系统和轮边系统,所述悬架系统采用独立悬挂,以一对弹簧避震器和金属固定件组成,所述轮边系统由双膜片联轴器连接电机杆与转接光杆,轮毂上的法兰盘连接转接光杆与轮毂,所述前轴系统与后轴系统结构对称,所述底盘系统作为整车的下部结构,由弹簧-车身固定件、弹簧避震器、弹簧-电机固定件、侧板-车身固定件、多孔侧板、无刷减速直流电机、电机-轮胎连轴模块和橡胶轮胎等部件组成,所述核心硬件安装层,位于底盘系统之上,与车架相连接,所述底盘系统底部一侧固定安装有核心电子器件固定平台,且核心电子器件固定平台位于核心硬件安装层的后侧。
3、进一步的,所述核心硬件安装层其结构采用铝柱进行切割定制,形成四足支撑结构,为上中下三部分提供核心支撑,所述核心硬件安装层作为整车的中层结构,主要搭载智能边缘处理器、stm运动控制板、rgb-d摄像头、电源等电子设备。
4、进一步的,所述上层空间放置gps天线,以及搭载智能应用设备,便于拓展功能。
5、进一步的,还包括如下控制系统:电子制动系统,智能决策控制系统,电源管理系统。
6、作为本发明的一种优选实施方式,包括如权利要求书1所述的基于无人驾驶技术的四驱越野车,所述导航系统包括gps模块、视觉系统模块和运动模块;所述gps模块:基于北斗卫星系统获取全球定位信息,接入rtk模块,获取厘米级的定位精度;所述视觉系统模块:使用rgb-d相机获取图像信息,基于vins-fusion算法融合imu信息,进行建图定位;所述运动模块:由下层stm接受决策层发送的ros运动指令,并驱动直流减速电机运行,发送接受执行频率为hz。
7、融合导航模块:获取gps模块的输出与imu进行卡尔曼滤波i融合,并获取视觉系统模块的输出信息,再次进行数据融合,最终获取具有鲁棒性的定位信息。
8、作为本发明的一种优选实施方式,gps系统获取车体信息,将经纬高坐标转换进当前坐标系;视觉系统以vins-fusion算法为核心,使用rgb-d摄像机构建基于八叉树的稠密建图,实时生成局部三维稠密地图,保存关键帧的位姿图信息;将imu解算的九轴姿态带入gps系统中,根据gps测量误差构建扩展卡尔曼滤波,形成ins/gps滤波器;将imu解算的九轴姿态带入视觉系统中,根据视觉模型测量误差构建扩展卡尔曼滤波,形成ins/vins滤波器;将前两步骤形成的滤波器进行数据融合,利用gps的全局信息消除累计误差,进而减小闭环依赖,最终输出精准定位。
9、作为本发明的一种优选实施方式,将gps系统接入高精度rtk模块,基于实时动态差分定位技术,实现高精度定位,其具体步骤如下:
10、基准站将自身获得的载波相位观测值及站点坐标,通过数据通信链实时发送给周围工作的动态用户;
11、位于车身的流动站数据模块使用动态差分定位技术计算流动站相对基准站的坐标,并根据基站设定的坐标反算流动站的坐标,实现定位。
12、作为本发明的一种优选实施方式,其导航路径的实现具体分为全局路径导航、局部路径导航,其导航方式为:
13、全局路径规划由gps系统获取的全局地图,进行实时规划更新,规划算法采用优化的a星算法。
14、局部路径规划采用teb_local_planner算法,可实现实现静态/动态障碍物、通过给定点、最小转向半径等多种约束条件下的时间最优轨迹规划。
15、作为本发明的一种优选实施方式,由于在构建实际地图,其地图体积庞大,原有的全局路径规划算法耗时较长,启动缓慢,因此本发明采用了优化的a*算法,其优化步骤为:
16、用哈希表备份算法中所需的表,并用哈希表查找操作替代地图栅格表上的查找操作。
17、作为本发明的一种优选实施方式,部路径导航基于摄像头构建的局部地图与定位,由于rgb-d相机可视角度有限,构建地图范围有限,不适合开阔地形,故采用双相机。
18、与现有技术相比,本发明的有益效果如下:
19、本发明通过车体设计的减震结构能够负载670kg,能够运输大量货物;橡胶轮与大功率电机能够克服各种恶劣地形。
20、gps接入rtk模块,可有效的消除电离层误差,对流层误差,卫星时钟误差和接收机时钟误差,提高定位精度。
21、通过卡尔曼滤波器的数据融合,即便丢失gps的信号,缺少全局信息的更新,只是基于imu的位姿更新会导致误差越来越大,但本导航系统仍能维持导航进行,待gps信号恢复,即可修复定位的累计误差。
22、视觉系统与gps进行数据融合,利用gps的位置约束,使得位姿图优化无需依赖回环,可根据全局信息消除累计误差,输出更为精准的定位信息。
23、本发明为无人驾驶技术提供了在野外环境下的的新应用尝试,能够基于gps的全局地区进行目标点的选取,基于视觉导航系统与imu的融合实时更新局部导航路线,规避外界环境的刺激,依靠高负载的减震系统能平稳地运行在多种路况上,实现无人驾驶技术在野外的探索与应用。
技术特征:
1.基于无人驾驶技术的四驱越野车,包括底盘系统和核心硬件安装层(4),所述底盘系统包括前后轴系统、车架,所述前轴系统和后轴系统位于车体的前后两侧,与车架依靠角钢与船型螺母固定,所述前后轴系统包括悬架系统(5)和轮边系统,所述悬架系统(5)采用独立悬挂,以一对弹簧避震器和金属固定件组成,所述轮边系统由双膜片联轴器连接电机杆与转接光杆,轮毂上的法兰盘连接转接光杆与轮毂,所述前轴系统与后轴系统结构对称,所述底盘系统作为整车的下部结构,由弹簧-车身固定件(51)、弹簧避震器(52)、弹簧-电机固定件(53)、侧板-车身固定件(54)、多孔侧板(55)、无刷减速直流电机(56)、电机-轮胎连轴模块(57)和橡胶轮胎(3)等部件组成,所述核心硬件安装层(4),位于底盘系统之上,与车架相连接,所述底盘系统底部一侧固定安装有核心电子器件固定平台(6),且核心电子器件固定平台(6)位于核心硬件安装层(4)的后侧。
2.导航系统,其特征在于:包括如权利要求书1所述的基于无人驾驶技术的四驱越野车,所述导航系统包括gps模块、视觉系统模块和运动模块;所述gps模块:基于北斗卫星系统获取全球定位信息,接入rtk模块,获取厘米级的定位精度;所述视觉系统模块:使用rgb-d相机获取图像信息,基于vins-fusion算法融合imu信息,进行建图定位;所述运动模块:由下层stm32接受决策层发送的ros运动指令,并驱动直流减速电机运行,发送接受执行频率为10hz。
3.根据权利要求2所述的导航系统,其特征在于:gps系统获取车体信息,将经纬高坐标转换进当前坐标系;视觉系统以vins-fusion算法为核心,使用rgb-d摄像机构建基于八叉树的稠密建图,实时生成局部三维稠密地图,保存关键帧的位姿图信息;将imu解算的九轴姿态带入gps系统中,根据gps测量误差构建扩展卡尔曼滤波,形成ins/gps滤波器;将imu解算的九轴姿态带入视觉系统中,根据视觉模型测量误差构建扩展卡尔曼滤波,形成ins/vins滤波器;将前两步骤形成的滤波器进行数据融合,利用gps的全局信息消除累计误差,进而减小闭环依赖,最终输出精准定位。
4.根据权利要求2所述的导航系统,其特征在于:将gps系统接入高精度rtk模块,基于实时动态差分定位技术,实现高精度定位,其具体步骤如下:
5.根据权利要求2所述的导航系统,其特征在于:其导航路径的实现具体分为全局路径导航、局部路径导航,其导航方式为:
6.根据权利要求2所述的导航系统,其特征在于:由于在构建实际地图,其地图体积庞大,原有的全局路径规划算法耗时较长,启动缓慢,因此本发明采用了优化的a*算法,其优化步骤为:
7.根据权利要求2所述的导航系统,其特征在于:部路径导航基于摄像头构建的局部地图与定位,由于rgb-d相机可视角度有限,构建地图范围有限,不适合开阔地形,故采用双相机。
技术总结
本发明属于无人驾驶技术领域,具体为基于无人驾驶技术的四驱越野车及导航系统,包括底盘系统和核心硬件安装层,所述底盘系统包括前后轴系统、车架,所述前轴系统和后轴系统位于车体的前后两侧,与车架依靠角钢与船型螺母固定,所述前后轴系统包括悬架系统和轮边系统。本发明为无人驾驶技术提供了在野外环境下的的新应用尝试,能够基于GPS的全局地区进行目标点的选取,基于视觉导航系统与IMU的融合实时更新局部导航路线,规避外界环境的刺激,依靠高负载的减震系统能平稳地运行在多种路况上,实现无人驾驶技术在野外的探索与应用。
技术研发人员:张俊杰,童春芽,袁红星,张家赫,安瑶智,杨志远,李坤阳,黄瀚洋,陈庆宏,陈奕玮,祝思雨
受保护的技术使用者:宁波工程学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!