基于滑模观测器的履带车滑动参数实时估计方法及系统
本技术属于滑移估计,具体涉及一种基于滑模观测器的履带车滑动参数实时估计方法及系统。
背景技术:
1、履带车因其优越的机动性与通过性被广泛应用于行星探索、深海采矿、军事以及农垦等领域。随着自动驾驶技术的飞速发展,无人履带车在越野、深海等环境下的工作优势日益凸显,相关技术需求也随之成为研究热点。由于履带车采用差速转向机构,且工作环境较为恶劣,无论是在滑动转向的过程中还是翻越复杂地形时,履带与地面间都会产生较大滑动,这对无人履带车的精确运动控制造成了较大影响。因此,研究履带车滑动参数的实时估计对无人履带车控制技术具有重要意义。
2、目前,履带车辆滑动参数的估计方法主要包括:
3、1)基于扩展卡尔曼滤波器(extend kalman filter,ekf)的估计方法。该方法通常是将履带车非线性运动学模型或非线性动力学模型通过泰勒级数展开进行线性化处理,并将模型状态向量扩维后与滑动参数结合构建滤波器的状态向量,在每一采样时刻通过预测与更新两大步骤获得使滤波器状态向量后验估计与对应真值的误差最小的卡尔曼增益,从而得到滑动参数的实时估计值。由于该方法需要对模型进行线性化,属于一种次优滤波方法,因此估计精度相对较低。
4、2)基于无迹卡尔曼滤波(unscented kalman filter,ukf)的估计方法。该方法与ekf相似,区别只在于ekf是通过泰勒级数展开使非线性模型转化为线性模型,从而适应标准卡尔曼滤波的线性假设,而ukf是通过无迹变换(unscented transform,ut)使非线性模型适用于标准卡尔曼滤波体系。由于该方法不用忽略高阶项,能够在一定程度上克服ekf估计精度低的问题,但在无迹变换过程中的参数选取与协方差矩阵初值的设置均影响估计的结果,且无迹变换本身也属于一种后验近似,仍未完全解决履带车模型高度非线性的问题。
5、3)基于滑模观测器(sliding mode observer,smo)的估计方法。该方法通过将履带车非线性模型中与滑动参数有关的项替换为趋近律,并以履带车状态量估计值与真值之差作为滑模面,从而构建非线性滑模观测器。由于完全基于非线性模型建立,不存在线性化误差,该方法的估计精度较高,且能在有限时间内趋近真值,收敛速度与稳定性相比其它方法均有所提高。但该方法在观测误差抵达滑模面时易出现突变,从而估计结果易在真值附近振荡,且无法处理一侧驱动轮转速为0等特殊情况。除以上方法外,还有机器学习、粒子滤波等估计方法,但每一种方法都有其优点和缺点,仍需进一步研究与改进。
6、基于上述估计方法,贝旭颖等提出了一种基于非线性滑模观测器的履带车滑动参数估计方法。该方法基于履带车非线性滑移运动学模型,并结合车载传感器,构建出以车辆横摆角为状态量,以两侧驱动轮转速为输入,以横摆角估计值与真值之差为滑模面,以指数趋近律代替滑移项的滑模观测器。在每一采样时刻,根据横摆角的估计值与真值之差以及两侧驱动轮转速实时估计出两侧履带的滑移率。该方法通过合理设置趋近律参数可保证:无论横摆角估计值与真值误差有多大均能在有限时间内抵达滑模面,从而使得履带车滑动参数的估计相对于传统的ekf算法估计精度更高且收敛速度更快。
7、但是,该基于非线性滑模观测器的履带车滑动参数估计方法仍有以下缺点:
8、1)依赖传感器获取车辆纵向速度,这一参数在深海、矿山等特殊场景难以获取。
9、2)仅考虑履带滑转这一场景,未考虑履带滑移的这一多发场景。
10、3)无法处理一侧或两侧驱动轮转速为0的情况。
11、4)仅设置横摆角估计值与真值之差这一单一滑模面,无法处理在初始时刻横摆角估计值与真值相同这类特殊情况。
12、5)算法本身会导致当观测误差抵达滑模面后会出现估计值突变,从而导致估计参数易在真值附近振荡。
13、这些因素都会影响该方法在不同场景下的适用性与估计精度,因此需要更具适用性且精度更高的履带滑动参数估计方法。
技术实现思路
1、本技术实施例的目的是提供一种基于滑模观测器的履带车滑动参数实时估计方法及系统,其通过设计一种非线性滑模观测器,在无需获取车辆纵向速度的前提下,实现对履带车滑动参数的快速、稳定、精确估计,在保证估计精度、收敛速度的同时提高了算法在各种特殊工况下的适用性,从而可以解决背景技术中涉及的至少一个技术问题。
2、为了解决上述技术问题,本技术提供如下技术方案:
3、第一方面,本技术实施例提供了一种基于滑模观测器的履带车滑动参数实时估计系统,包括环境感知单元、决策规划单元、滑动参数估计单元、控制单元以及底层执行单元,其中,
4、环境感知单元,其用于获取环境信息,经处理后输出给决策规划单元;
5、决策规划单元,其用于根据所述环境信息以及车辆状态信息进行全局轨迹规划,生成参考轨迹信息并输出给控制单元;
6、滑动参数估计单元,其基于车辆状态信息在线估计履带车的滑动参数值,得到滑动参数估计值并输出给控制单元;
7、控制单元,其结合参考轨迹信息和滑动参数估计值,计算控制指令并下发给底层执行单元控制履带车。
8、第二方面,本技术实施例提供了一种基于滑模观测器的履带车滑动参数实时估计方法,包括:
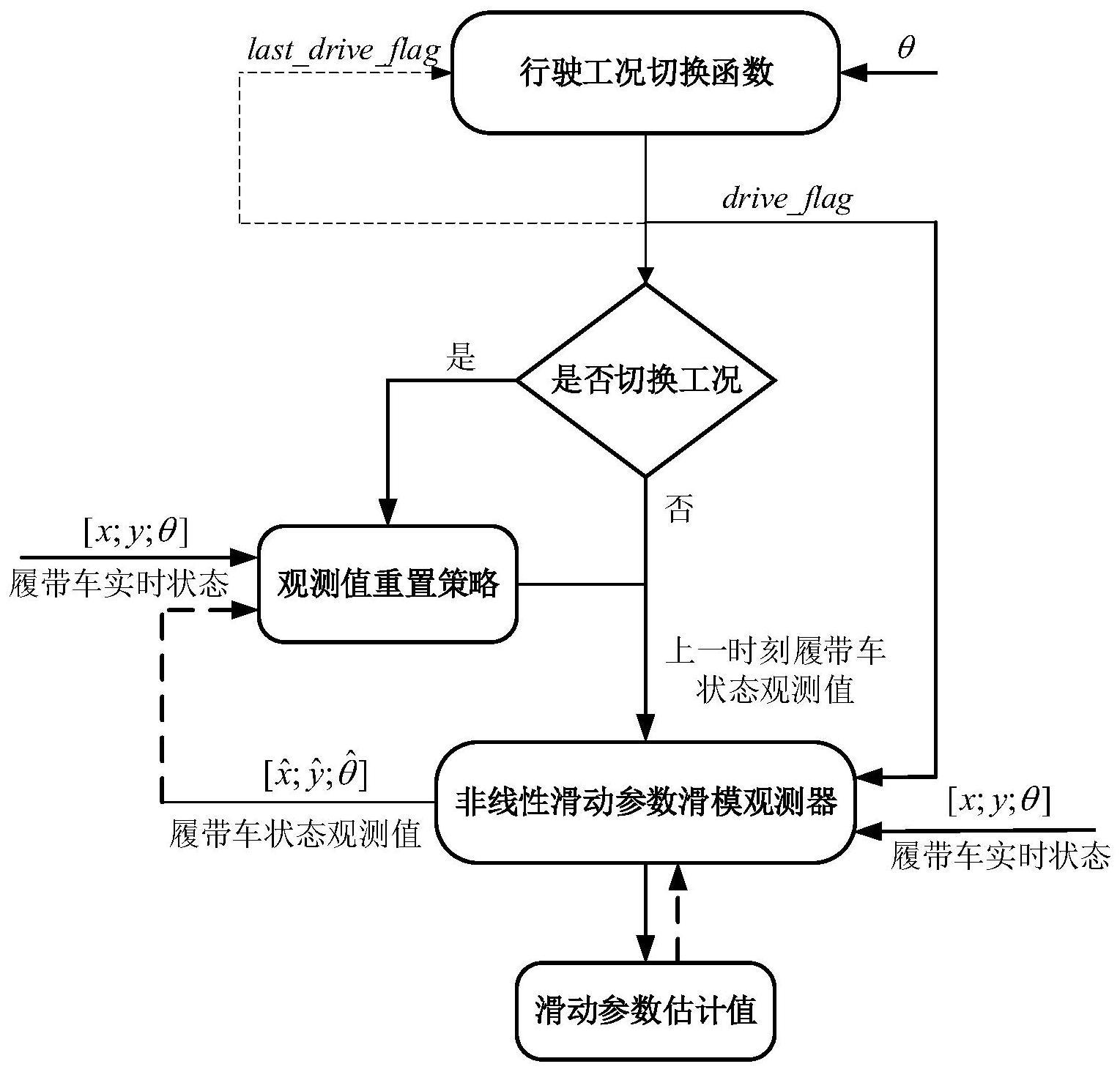
9、步骤一、根据履带车不同行驶工况特点设计行驶工况切换函数,每一采样时刻根据履带车实时横摆角以及上一时刻履带车行驶工况对应的标志位判断当前时刻车辆状态所属的行驶工况,并输出对应标志位;
10、步骤二、若当前车辆行驶工况对应的标志位与上一时刻车辆行驶工况对应的标志位不一致,则发生行驶工况切换,执行观测值重置策略,输出重置后的上一时刻履带车滑动参数估计值;
11、步骤三、基于履带车非线性滑移运动学模型设计非线性滑动参数滑模观测器;
12、步骤四、对设计的非线性滑动参数滑模观测器进行一阶差商离散化,获得非线性滑动参数滑模观测器离散状态方程,基于该方程结合车辆当前行驶工况与上一时刻车辆状态观测值和滑动参数估计值,获得车辆当前滑动参数估计值。
13、第三方面,本技术实施例提供了一种电子设备,该电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第二方面所述的方法的步骤。
14、第四方面,本技术实施例提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如第二方面所述的方法的步骤。
15、本技术实施例的有益效果如下:
16、1、通过设计三个滑模面并基于三个滑模面结合车辆具体行驶工况设计行驶工况切换函数。设计大地坐标系下x轴履带车质心坐标估计值与真值之差,大地坐标系下y轴履带车质心坐标估计值与真值之差,履带车横摆角估计值与真值之差三个滑模面,并根据三个滑模面结合车辆横摆角所处象限,设计四个象限内不同的滑模观测器状态方程,且针对四种工况设计行驶工况切换函数,从而避免单一滑模面易引起的在特殊初始条件下履带车滑动参数估计不准确的问题,并保证车辆在不同行驶工况下均能稳定、准确地估计滑动参数。
17、2、通过设计非线性滑动参数滑模观测器,基于履带车非线性滑移运动学模型,通过将状态向量扩维至包含两侧履带滑动参数,并在原模型状态方程的基础上分别添加基于三个滑模面设计的指数趋近律,且将原模型状态方程中的滑动参数相关项替换为由滑动参数估计值得到的两侧履带对地速度,最后以三种指数趋近律的不同结合形式构建两侧履带滑动参数的状态方程,从而构建出非线性滑动参数滑模观测器。该观测器不依赖车载传感器提供的车辆纵向速度,且在驱动轮转速为0这类纯滑移工况下仍能准确估计滑动参数,并不会在抵达滑模面后出现突变、振荡等情况,能够实现在各种工况下对履带车滑动参数的快速、稳定、精确估计。
- 还没有人留言评论。精彩留言会获得点赞!