用于识别车辆场景的方法及用于确定车辆速度的方法与流程
本发明涉及车辆,具体地涉及一种用于识别车辆场景的方法及用于确定车辆速度的方法。
背景技术:
1、现有技术中,车辆(例如,自动驾驶车辆)通常可以在多种不同的工况场景下驾驶,工况场景若以路面情况来区分,例如可以包括正常路面场景或者非正常路面场景(例如,路面打滑场景),识别车辆当前所处的工况场景对于车辆自身的安全驾驶至关重要。以自动驾驶车辆为例,若自动驾驶车辆无法准确识别其当前所处的具体工况场景,则可能会严重威胁自动驾驶车辆的自动驾驶安全。目前,车辆可以通过激光雷达、高清摄像头等对路面进行探测,以识别出路面情况,进而识别出车辆当前所处的工况场景,然而,该方法存在硬件成本较高的问题。
技术实现思路
1、本发明实施例的目的是提供一种用于识别车辆场景的方法、用于确定车辆速度的方法、处理器、用于识别车辆场景的装置、用于确定车辆速度的装置以及车辆,以解决现有技术存在的问题。
2、为了实现上述目的,本发明实施例第一方面提供一种用于识别车辆场景的方法,车辆包括驱动轮和非驱动轮,方法包括:
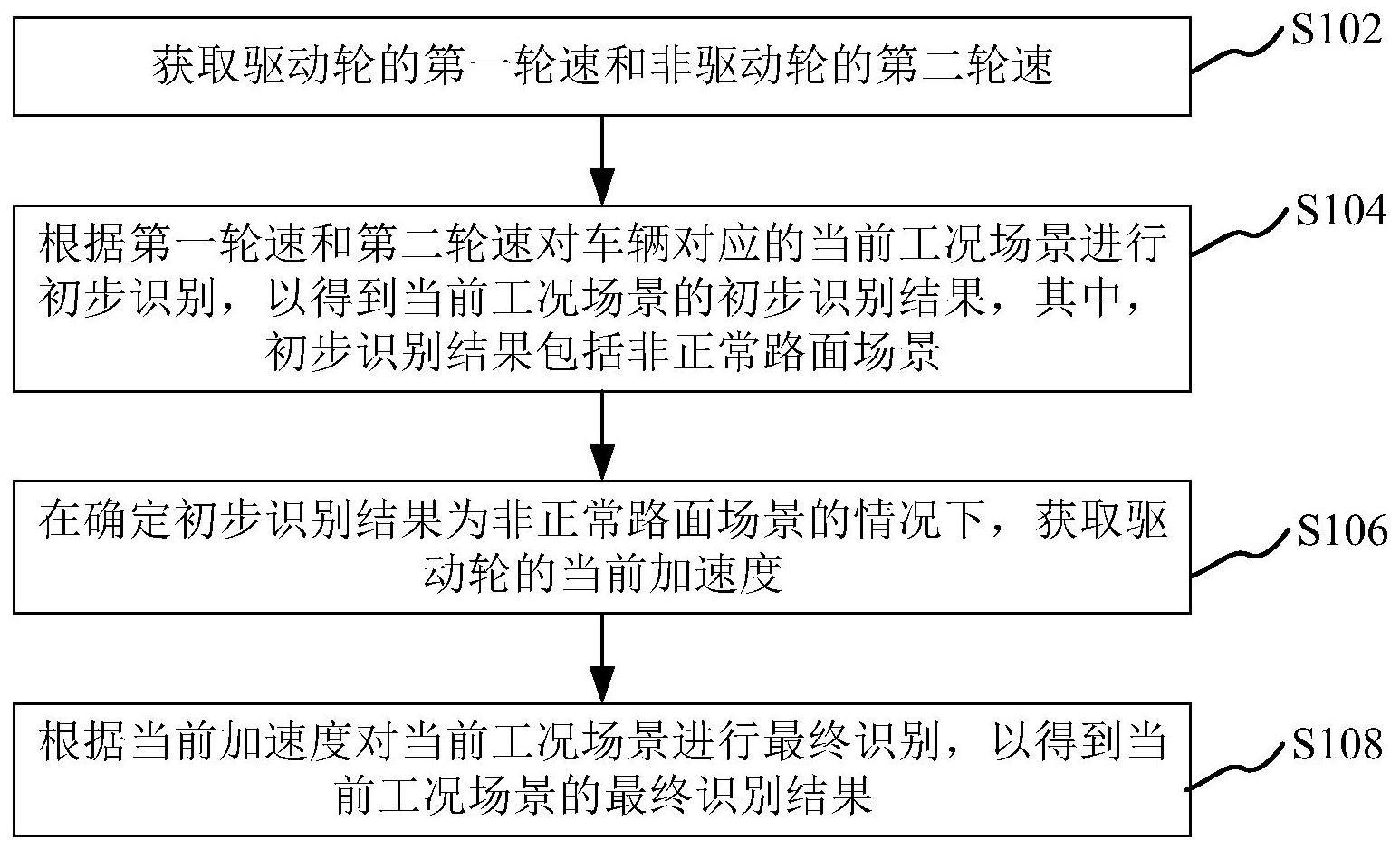
3、获取驱动轮的第一轮速和非驱动轮的第二轮速;
4、根据第一轮速和第二轮速对车辆对应的当前工况场景进行初步识别,以得到当前工况场景的初步识别结果,其中,初步识别结果包括非正常路面场景;
5、在确定初步识别结果为非正常路面场景的情况下,获取驱动轮的当前加速度;
6、根据当前加速度对当前工况场景进行最终识别,以得到当前工况场景的最终识别结果。
7、在本发明实施例中,初步识别结果还包括正常路面场景;根据第一轮速和第二轮速对车辆的当前工况场景进行初步识别,以得到当前工况场景的初步识别结果,包括:将第一轮速与第二轮速进行比较;在第一轮速与第二轮速的差值小于或等于预设轮速差值的情况下,确定初步识别结果为正常路面场景;在第一轮速与第二轮速的差值大于预设轮速差值的情况下,确定初步识别结果为非正常路面场景。
8、在本发明实施例中,最终识别结果包括路面打滑场景;根据当前加速度对当前工况场景进行最终识别,以得到当前工况场景的最终识别结果,包括:将当前加速度与预设车辆加速度进行比较;在当前加速度与预设车辆加速度的差值的绝对值位于预设加速度差值范围内的情况下,确定最终识别结果为路面打滑场景。
9、在本发明实施例中,根据当前加速度对当前工况场景进行最终识别,以得到当前工况场景的最终识别结果,包括:根据当前加速度和第二轮速对当前工况场景进行最终识别,以得到当前工况场景的最终识别结果。
10、在本发明实施例中,最终识别结果包括车辆悬空场景和转毂测试场景;根据当前加速度和第二轮速对当前工况场景进行最终识别,以得到当前工况场景的最终识别结果,包括:将当前加速度与预设车辆加速度进行比较,以及将第二轮速与预设轮速阈值进行比较;在当前加速度与预设车辆加速度的差值的绝对值大于预设加速度差值范围的上限阈值且第二轮速小于预设轮速阈值的情况下,确定最终识别结果为车辆悬空场景;在当前加速度与预设车辆加速度的差值的绝对值小于预设加速度差值范围的下限阈值且第二轮速小于预设轮速阈值的情况下,确定最终识别结果为转毂测试场景。
11、在本发明实施例中,方法还包括:获取当前工况场景的持续时间长度;确定持续时间长度大于预设时间长度。
12、在本发明实施例中,预设轮速差值的取值范围包括2~6km/h。
13、在本发明实施例中,预设加速度差值范围的上限阈值的取值范围包括1.2~1.8m/s2,预设加速度差值范围的下限阈值的取值范围包括0.2~0.5m/s2。
14、在本发明实施例中,预设轮速阈值的取值范围包括0.1~1km/h。
15、在本发明实施例中,预设时间长度的取值范围包括1~4s。
16、本发明实施例第二方面提供一种用于确定车辆速度的方法,车辆包括驱动轮和非驱动轮,方法包括:
17、识别车辆对应的当前工况场景,其中,当前工况场景根据上述的用于识别车辆场景的方法识别确定;
18、获取驱动轮的第一轮速和/或非驱动轮的第二轮速;
19、根据当前工况场景、第一轮速和/或第二轮速确定车辆在当前工况场景对应的当前车速。
20、在本发明实施例中,当前工况场景包括正常路面场景、路面打滑场景、车辆悬空场景以及转毂测试场景;根据当前工况场景、第一轮速和/或第二轮速确定车辆在当前工况场景对应的当前车速,包括:在当前工况场景为正常路面场景的情况下,确定第一轮速和第二轮速的均值,以得到当前车速;在当前工况场景为路面打滑场景的情况下,确定第二轮速为当前车速;在当前工况场景为车辆悬空场景的情况下,确定第一轮速为当前车速;在当前工况场景为转毂测试场景的情况下,确定第一轮速为当前车速。
21、在本发明实施例中,方法还包括:对当前车速进行滤波平滑处理,以得到处理后的当前车速。
22、在本发明实施例中,对当前车速进行滤波平滑处理,以得到处理后的当前车速,包括:获取当前工况场景对应的滤波系数,其中,滤波系数小于1;基于滤波系数对当前车速进行滤波平滑处理,以得到处理后的当前车速。
23、在本发明实施例中,基于滤波系数对当前车速进行滤波平滑处理,以得到处理后的当前车速,包括:获取上一工况场景对应的上一车速;根据当前车速、上一车速以及滤波系数确定处理后的当前车速。
24、在本发明实施例中,根据当前车速、上一车速以及滤波系数确定处理后的当前车速,包括:确定当前车速与上一车速的车速差值;确定车速差值与滤波系数的乘积值;在上一车速的基础上加上乘积值,以得到处理后的当前车速。
25、在本发明实施例中,滤波系数包括车辆悬空场景对应的第一滤波系数、路面打滑场景对应的第二滤波系数、正常路面场景对应的第三滤波系数以及转毂测试场景对应的第四滤波系数,第一滤波系数的取值范围包括0.4~0.6,第二滤波系数的取值范围包括0.05~0.15,第三滤波系数和第四滤波系数的取值范围包括0.2~0.3。
26、在本发明实施例中,获取驱动轮的第一轮速和/或非驱动轮的第二轮速,包括:在驱动轮的数量为多个的情况下,确定多个驱动轮的轮速的平均值为第一轮速;和/或在非驱动轮的数量为多个的情况下,确定多个非驱动轮的轮速的平均值为第二轮速。
27、本发明实施例第三方面提供一种处理器,被配置成执行根据上述的用于识别车辆场景的方法或者根据上述的用于确定车辆速度的方法。
28、本发明实施例第四方面提供一种用于识别车辆场景的装置,车辆包括驱动轮和非驱动轮,装置包括:
29、轮速获取模块,用于获取驱动轮的第一轮速和非驱动轮的第二轮速;
30、初步识别模块,用于根据第一轮速和第二轮速对车辆对应的当前工况场景进行初步识别,以得到当前工况场景的初步识别结果,其中,初步识别结果包括非正常路面场景;
31、加速度获取模块,用于在确定初步识别结果为非正常路面场景的情况下,获取驱动轮的当前加速度;
32、最终识别模块,用于根据当前加速度对当前工况场景进行最终识别,以得到当前工况场景的最终识别结果。
33、本发明实施例第五方面提供一种用于确定车辆速度的装置,车辆包括驱动轮和非驱动轮,装置包括:
34、场景识别模块,用于识别车辆对应的当前工况场景,其中,当前工况场景根据上述的用于识别车辆场景的方法识别确定;
35、轮速获取模块,用于获取驱动轮的第一轮速和/或非驱动轮的第二轮速;
36、车速确定模块,用于根据当前工况场景、第一轮速和/或第二轮速确定车辆在当前工况场景对应的当前车速。
37、本发明实施例第六方面提供一种车辆,车辆包括驱动轮和非驱动轮,车辆包括:根据上述的用于识别车辆场景的装置或者根据上述的用于确定车辆速度的装置。
38、上述技术方案,通过获取驱动轮的第一轮速和非驱动轮的第二轮速,并根据第一轮速和第二轮速对车辆对应的当前工况场景进行初步识别,以得到当前工况场景的初步识别结果,在确定初步识别结果为非正常路面场景的情况下,进而获取驱动轮的当前加速度,从而根据当前加速度对当前工况场景进行最终识别,以得到当前工况场景的最终识别结果。上述技术方案不需要额外增加硬件设备即可实现工况场景的识别,减少了硬件成本,根据驱动轮和非驱动轮的轮速对工况场景进行初步识别,在初始识别结果为非正常路面场景时,根据驱动轮的当前加速度对工况场景进行最终识别,从而可以确定非正常路面场景的具体类型,提高了工况场景识别的精准度。
39、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!