车辆制动系统操作方法和控制自动泊车过程的车辆控制系统与流程
本发明涉及一种用于操作车辆的制动系统的方法以及用于控制自动泊车过程的车辆控制系统。
背景技术:
1、自动泊车过程允许车辆停泊在泊车点,而无需驾驶员的主动干预。这通常或者根据车辆可能的是,驾驶员他/她自己在该过程期间在车外,并且无论如何都不可能主动干预方向盘、油门踏板和制动踏板。自动泊车过程通常以步行速度进行,因此速度小于10km/h。
2、为了启用这种类型的自动泊车过程,需要启动行车制动器。行车制动器被理解为还在最大车速下的正常驾驶操作中使用以在四个车轮上生成制动力,从而使车辆减速并且在必要时使车辆停止的制动器。
3、除了行车制动器,车辆还包括驻车制动器。这也被称为停车制动器或手刹,其独立于机动车辆的行车制动器被设计,并且被用于将车辆安全地保持静止。
4、在自动泊车过程中,如果行车制动系统发生故障,则先前相关技术中的自动泊车过程立即中止,并且车辆通过启动驻车制动器安全地减速并保持静止。因此,泊车过程没有完成,并且驾驶员被迫进入车辆,松开驻车制动器,并且手动结束泊车过程。
5、本发明解决的问题是可靠地执行和完成自动泊车过程,从而提高了自动泊车功能的可用性并且仍然是安全的。此外,还应降低因行车制动系统故障而中止自动泊车过程的比率。
技术实现思路
1、本发明解决的问题通过一种用于在自动泊车(或自主泊车)过程期间操作车辆的制动系统的方法来解决,该车辆包括第一电子控制单元,其中,第一控制单元被设计用于启动行车制动系统和部分制动系统,所述方法包括以下步骤:
2、a)发起自动泊车过程;
3、b)借助于所述第一控制单元启动所述行车制动系统以生成制动力;以及
4、c)在所述行车制动系统失效的情况下,借助于所述第一控制单元启动所述部分制动系统,以便在所述自动泊车过程继续进行期间通过利用所述部分制动系统生成制动力。
5、本发明的基本概念是在导致系统失效的行车制动系统故障的情况下通过第一电子控制单元在平稳过渡中启动部分制动系统,使得制动需求通过控制单元从行车制动系统发送到部分制动系统,来增加自动泊车过程的功能的可用性。
6、这使得可以继续可能已经开始的自动泊车过程,并且通过利用部分制动系统完成自动泊车过程。换言之,借助于第一电子控制单元启动部分制动系统的可能性形成了对行车制动系统失效的情况的后背(fallback)支持。
7、由于自动泊车过程中始终存在并且通常处于步行速度范围内因此小于10km/h的低速度,由部分制动系统生成的制动力完全足以将车辆安全地引导到泊车点并且关闭车辆。
8、在自动泊车过程期间第一控制单元失效的情况下,被设计用于启动部分制动系统并且经由通信链路联接到第一控制单元的第二控制单元可以执行部分制动系统的启动,以生成制动力。例如,在自动泊车过程期间,第一控制单元可以输出故障消息,该故障消息经由通信链路发送到第二控制单元,使得第二控制单元接收该命令而接管自动泊车过程。结果,创建了另一后背支持,使得在第一控制单元失效的情况下也可以完成自动泊车过程,并且在这种情况下还确保了驻车制动功能的可用性。
9、通信链路可以被冗余地设计,并且形成can总线系统的一部分。
10、在自动泊车过程期间第一控制单元和第二控制单元失效的情况下,被设计用于启动行车制动系统和/或部分制动系统并且经由通信链路联接至第一控制单元和/或第二控制单元的第三控制单元可以执行对部分制动系统的启动以生成制动力。这可以优选地经由单独控制线路实现,所述单独控制线路从第三控制单元延伸经过第一控制单元和第二控制单元到达部分制动系统。
11、因此,由第三控制单元形成另一后背支持,使得自动泊车过程可以由第三控制单元独立于第一控制单元和第二控制单元来执行。
12、经由第一控制单元和第三控制单元之间以及第二控制单元和第三控制单元之间的通信链路,确保了第三控制单元登记第一控制单元和第二控制单元的失效,并且通过立即接管部分制动系统的启动而确保了自动泊车过程能够继续。
13、由于单独控制线路,第三控制单元不需要将第一控制单元或第二控制单元的控制线路接入行车制动系统和/或部分制动系统,由此实现了进一步冗余。
14、第一控制单元和第三控制单元之间以及第二控制单元和第三控制单元之间的通信链路也可以被冗余地设计并且可以是can总线系统的一部分。
15、第三控制单元可以被设计用于控制车辆的自动驾驶和/或自动泊车过程。这具有这样的优点,即,不需要在车辆中提供附加第三控制单元,而是可以访问用于车辆的自动驾驶的现有控制单元。因此,第三控制单元例如是连接在其它两个控制单元上游的控制单元。
16、在自动泊车过程期间第一控制单元和第二控制单元失效的情况下,第三控制单元在继续自动泊车过程的同时启动行车制动系统和/或部分制动系统。因此,第三控制单元不仅接管制动系统的启动,而且还能够继续自动泊车过程,直到自动泊车过程已经完成。
17、此外,这种类型的控制单元通常无论如何都经由单独控制线路联接到行车制动系统和部分制动系统,因此也不需要提供附加控制线路。
18、行车制动系统可以是液压或机电制动系统。机电制动系统允许特别简单且不复杂的启动。此外,多个控制单元可以容易地联接到这种类型的制动系统。
19、第二部分制动系统可以是机电驻车制动器。因此,第二部分制动系统与行车制动系统完全分离,并且被设计为封闭独立系统。行车制动系统的故障或失效绝对不会对部分制动系统产生不利影响。
20、此外,在车辆中通常存在机电驻车制动器,因此不需要在车辆中安装附加部分制动系统。机电驻车制动器也可以特别容易地被启动,并且可以容易地联接到多个控制单元。
21、开始提到的问题也通过用于控制自动泊车过程的车辆控制系统来解决,车辆控制系统包括车辆的制动系统和第一电子控制单元,制动系统包括行车制动系统和部分制动系统,其中,用于启动行车制动系统和部分制动系统的第一控制单元以如下方式设计,即:第一控制单元能够启动自动泊车过程,借助于第一控制单元启动行车制动系统以生成制动力,并且在行车制动系失效的情况下,启动部分制动系统,以便在自动泊车过程继续进行期间通过利用部分制动系统生成制动力。
22、关于所产生的优点,参考上述解释。
23、优选地,可以存在第二控制单元,在第一控制单元失效的情况下,第二控制单元能够在正在进行的自动泊车过程期间启动部分制动系统。结果,在自动泊车过程期间发生生成制动力的任务从第一控制单元到第二控制单元的平稳转移。
24、此外,可以存在第三控制单元,在第一控制单元和第二控制单元失效的情况下,第三控制单元能够在正在进行的自动泊车过程期间启动部分制动系统。
25、特别地,第三控制单元甚至控制整个自动泊车过程,而不管第一控制单元和/或第二控制单元是否起作用。关于所产生的优点,参考上述解释。
技术特征:
1.一种用于在自动泊车过程期间操作车辆的制动系统(12)的方法,所述车辆包括第一电子控制单元(14),其中,所述第一控制单元(14)被设计用于启动行车制动系统(16)和部分制动系统(18),所述方法包括以下步骤:
2.根据权利要求1所述的用于在自动泊车过程期间操作车辆的制动系统(12)的方法,其特征在于,在自动泊车过程期间所述第一控制单元(14)失效的情况下,被设计用于启动所述部分制动系统(18)并且经由通信链路(32)联接到所述第一控制单元(14)的第二控制单元(28)执行对所述部分制动系统(18)的启动,以生成制动力。
3.根据权利要求2所述的用于在自动泊车过程期间操作车辆的制动系统(12)的方法,其特征在于,在自动泊车过程期间所述第一控制单元(14)和所述第二控制单元(28)失效的情况下,被设计用于启动所述行车制动系统(16)和/或所述部分制动系统(18)并且经由通信链路(32)联接至所述第一控制单元(14)和/或所述第二控制单元(18)的第三控制单元(34)执行对所述部分制动系统(18)的启动,以便优选地经由单独控制线路(36)生成制动力,所述单独控制线路(36)从所述第三控制单元(34)延伸经过所述第一控制单元(14)和所述第二控制单元(28)到达所述部分制动系统(18)。
4.根据权利要求3所述的用于在自动泊车过程期间操作车辆的制动系统(12)的方法,其特征在于,所述第三控制单元(34)被设计用于控制自动驾驶。
5.根据权利要求3或4所述的用于在自动泊车过程期间操作车辆的制动系统(12)的方法,其特征在于,在所述自动泊车过程期间所述第一控制单元(14)和所述第二控制单元(28)失效的情况下,所述第三控制单元(34)在继续进行所述自动泊车过程的同时启动所述行车制动系统(16)和/或所述部分制动系统(18)。
6.根据前述权利要求中任一项所述的用于在自动泊车过程期间操作车辆的制动系统(12)的方法,其特征在于,所述行车制动系统(16)是液压或机电制动系统(20)。
7.根据前述权利要求中任一项所述的用于在自动泊车过程期间操作车辆的制动系统(12)的方法,其特征在于,所述部分制动系统(18)是机电驻车制动器(22)。
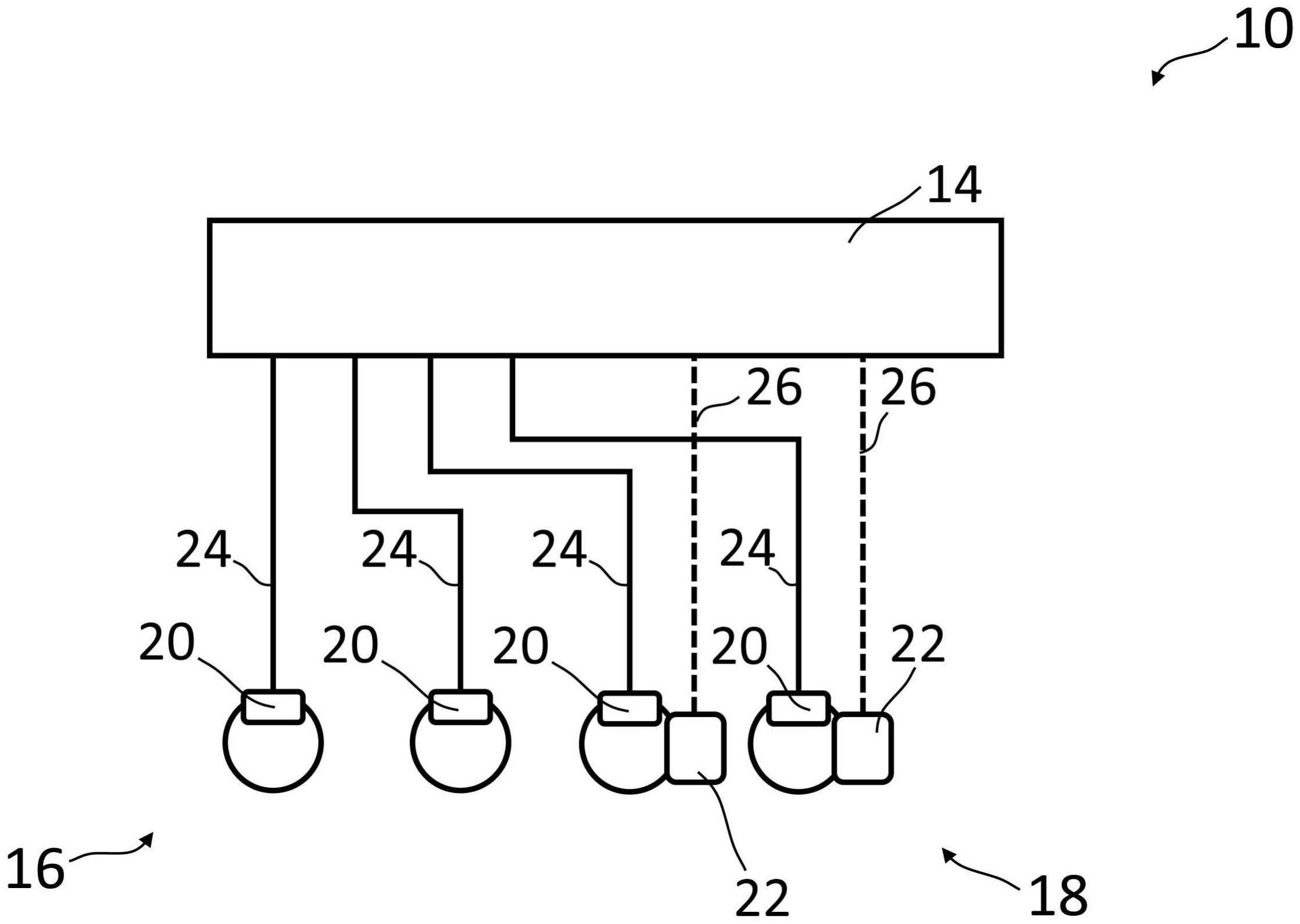
8.一种用于控制自动泊车过程的车辆控制系统,所述车辆控制系统包括车辆的制动系统(12)和第一电子控制单元(14),所述制动系统包括行车制动系统(16)和部分制动系统(18),其中,用于启动行车制动系统(16)和部分制动系统(18)的所述第一控制单元(14)以如下方式设计,即:所述第一控制单元(14)能够发起自动泊车过程,借助于所述第一控制单元(14)启动所述行车制动系统(16),以便生成制动力,并且在所述行车制动系统(16)失效的情况下,启动所述部分制动系统(18),以便在所述自动泊车过程继续进行期间通过利用所述部分制动系统(18)生成制动力。
9.根据权利要求8所述的车辆控制系统,其特征在于,存在第二控制单元(28),在所述第一控制单元(14)失效的情况下,所述第二控制单元能够在正在进行的自动泊车过程期间启动所述部分制动系统(18)。
10.根据权利要求9所述的车辆控制系统,其特征在于,存在第三控制单元(28),在所述第一控制单元(14)和所述第二控制单元(28)失效的情况下,所述第三控制单元能够在正在进行的自动泊车过程期间启动所述部分制动系统。
技术总结
本发明涉及车辆制动系统操作方法和控制自动泊车过程的车辆控制系统。具体地说,提供了一种用于在自动泊车过程期间操作车辆的制动系统(12)的方法,该车辆包括第一电子控制单元(14),其中,所述第一控制单元(14)被设计用于启动行车制动系统(16)和部分制动系统(18),在该方法中,发起自动泊车过程,随后借助于所述第一控制单元(14)启动行车制动系统(16)以生成制动力,并且在所述行车制动系统(16)失效的情况下,借助于第一控制单元(14)启动部分制动系统(18),以便在继续自动泊车过程的同时通过利用部分制动系统(18)生成制动力。此外,本发明涉及用于控制自动泊车过程的车辆控制系统。
技术研发人员:F·舒密特,E·兰泽,A·马克斯,F·艾尼格
受保护的技术使用者:采埃孚主动安全股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!