车辆控制装置的制作方法
本发明涉及在驾驶员陷入了无法进行车辆的驾驶的状态的情况下使该车辆减速而停止的车辆控制装置。
背景技术:
1、以往提出了以下装置,该装置判定驾驶员是否陷入了无法进行车辆的驾驶的状态即异常状态(即,驾驶员失去了驾驶车辆的能力的状态,例如瞌睡驾驶状态及身心功能停止状态等),在做出了这样的判定的情况下控制车辆。例如,这样的装置之一(以下,称为“以往装置”)当在车道维持控制的执行期间中判定为驾驶员陷入了异常状态时,执行车道维持控制、减速控制以及警报控制(例如,参照专利文献1)。
2、车道维持控制是自动变更车辆的舵角以使得车辆沿着行驶车道行驶的控制。减速控制是使车辆减速而停止的控制。警报控制是使用声音和/或光等向车辆的内外发出警报的控制。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2017-144808号公报(例如,段落0083至段落0086)
技术实现思路
1、车道维持控制例如在行驶车道是曲线路且车辆的横向加速度超过预先确定的控制界限横向加速度那样的情况下自动停止(取消)。以往装置中,即便在判定为驾驶员陷入了异常状态的情况下,当发生了车道维持控制停止的状况时,不仅是“车道维持控制”,“减速控制及警报控制”也停止。即,根据以往装置,存在会产生即便在做出了驾驶员陷入了异常状态这一判定的情况下也无法活用该判定的事态这一问题。
2、本发明为了解决上述课题而做出。即,本发明的目的之一在于,提供如下车辆控制装置,该车辆控制装置在做出了驾驶员陷入了异常状态这一判定的时间点以后,即便在由于车道维持控制达到其控制界限而停止那样的状况下,也能够活用驾驶员陷入了异常状态这一判定。
3、本发明的车辆控制装置的一方案具备:
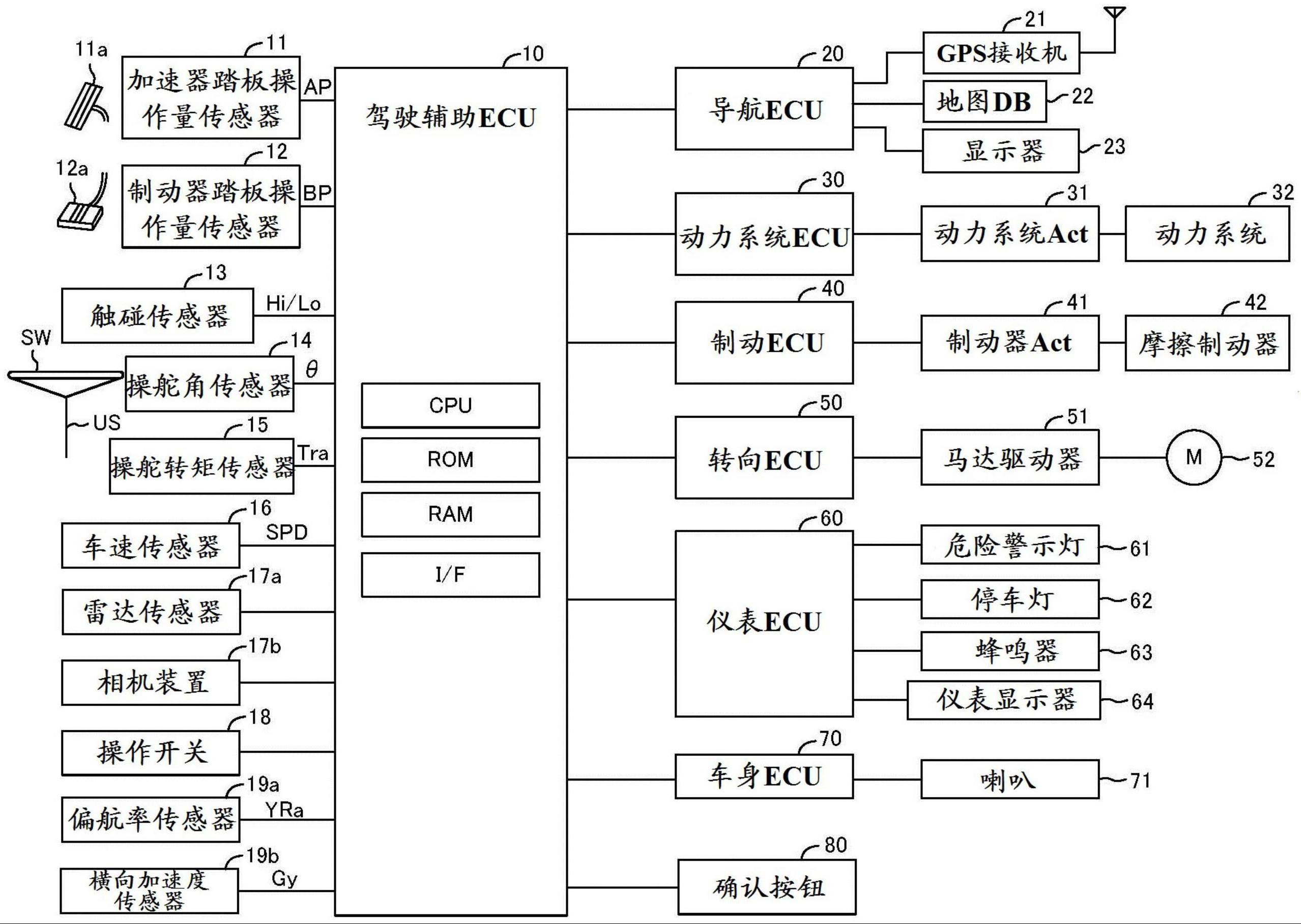
4、区划线信息取得装置(17b),包括对车辆的前方进行拍摄而取得图像数据的相机(摄像头),基于所述图像数据取得区划线信息,该区划线信息包括关于区划所述车辆正在行驶的车道即行驶车道的区划线的信息、及表示所述区划线与所述车辆的车道宽度方向的位置关系的信息;
5、车速变更致动器(31,41),能够变更所述车辆的速度即车速;
6、舵角致动器(51,52),能够变更所述车辆的舵角;
7、行驶状态传感器(11,12,14,15,16,19a,19b),能够取得表示所述车辆的行驶状态的行驶状态参数;
8、驾驶员状态传感器(11,12,13,14,15,80),取得表示所述车辆的驾驶员的状态的驾驶员状态参数;
9、位置取得装置(20,21),取得表示所述车辆的当前时间点的位置的当前时间点位置参数;
10、车道信息取得装置(20,22),基于所述车辆的位置取得包括表示所述行驶车道的形状的参数的车道信息;以及
11、控制单元(10,50),执行基于所述区划线信息控制所述舵角致动器以使得所述车辆沿着所述行驶车道行驶的车道维持控制(步骤1130),并且在至少基于所述行驶状态参数而在所述车道维持控制的执行期间中判定为针对该车道维持控制预先确定的控制界限条件成立的情况下停止所述车道维持控制的执行(步骤1120:是,步骤1160)。
12、进而,所述控制单元构成为,
13、基于所述驾驶员状态参数判定是否发生了能够确定为所述驾驶员陷入了无法进行所述车辆的驾驶的异常状态的异常确定状态(步骤665),
14、在做出发生了所述异常确定状态这一判定的情况下,基于所述行驶状态参数、所述当前时间点位置参数以及所述车道信息,推定是否发生在假定使所述车辆以第1减速度减速了时在所述车辆停止之前所述控制界限条件成立的特定状况(步骤850,步骤1220),
15、在推定为发生所述特定状况的情况下,控制所述车速变更致动器以使得所述车辆以具有比所述第1减速度的绝对值大的绝对值的第2减速度减速(步骤850及步骤860,步骤920,步骤1220及步骤1240),
16、在推定为没有发生所述特定状况的情况下,控制所述车速变更致动器以使得所述车辆以所述第1减速度减速(步骤850及步骤830,步骤920,步骤1220及步骤1230)。
17、根据该方案,在做出发生了所述异常确定状态这一判定的情况下,推定(判定)是否发生在假定使所述车辆以第1减速度减速了时在所述车辆停止之前车道维持控制的控制界限条件成立的特定状况。并且,在推定为没有发生特定状况的情况下,使得车辆以第1减速度减速。由此,不会进行过度的减速,且车辆能够通过车道维持控制在行驶车道上行驶并顺利地停止。
18、相对于此,在推定为发生特定状况的情况下,使得车辆以具有比第1减速度的绝对值大的绝对值的第2减速度减速。由此,能够提高在车道维持控制停止之前使车辆停止的可能性。而且,即便车道维持控制停止,也能够在该时间点之前使车辆的速度大幅降低,能够提高安全性。
19、在本发明装置的一方案中,
20、所述控制单元,
21、基于所述驾驶员状态参数判定是否发生了虽然所述驾驶员有可能陷入了所述异常状态但无法判定为发生了所述异常确定状态的状态即临时异常状态(步骤645),
22、在做出发生了所述临时异常状态这一判定的情况下,从做出发生了所述临时异常状态这一判定的时间点起,控制所述车速变更致动器以使得所述车辆以具有所述第1减速度的绝对值以下的绝对值的第3减速度减速(步骤710,步骤720,步骤920)。
23、根据该方案,能够在怀疑驾驶员陷入了所述异常状态的情况下使车辆逐渐减速。
24、在本发明装置的一方案中,
25、所述控制单元构成为,
26、在所述车道维持控制的执行期间中执行是否发生了所述异常确定状态的判定及是否发生了所述临时异常状态的判定(步骤610)。
27、通常,在车道维持控制的执行期间中要求驾驶员例如把持方向盘(没有把持方向盘的状态不持续预定时间以上)。因此,根据该方案,能够精度良好地进行是否发生了异常确定状态的判定及是否发生了所述临时异常状态的判定。
28、在本发明装置的一方案中,
29、所述控制单元构成为,
30、即便在推定为没有发生所述特定状况的情况下,在判定为在假定使所述车辆以所述第1减速度减速了时所述车辆在停止之前会进入所述行驶车道具有预定角度以上的倾斜角的上坡路(步骤1610:是)、并且在假定使所述车辆以所述第2减速度减速了时所述车辆能够在进入所述上坡路之前停止时(步骤1620:是),控制所述车速变更致动器以使得所述车辆以所述第2减速度减速(步骤1240)。
31、根据该方案,能够提高使驾驶员陷入了异常状态的车辆在急上坡路的跟前停止的可能性。因此,能够降低需要使后续车辆进行紧急制动的可能性。
32、在上述说明中,为了帮助理解本发明,对于与后述的实施方式对应的发明的构成,以写入括号的方式添加了在该实施方式中使用的名称和/或标号(附图标记)。然而,本发明的各构成要素不限定于由所述名称和/或标号规定的实施方式。本发明的其他目的、其他特征及附带的优点,能够从参照以下的附图记述的对本发明的实施方式的说明中容易地理解到。
- 还没有人留言评论。精彩留言会获得点赞!