滑板车驻车控制方法和装置与流程
本发明涉及滑板车驻车控制,尤其涉及一种滑板车驻车控制方法和装置。
背景技术:
1、目前很多四轮滑板电动车只有电子刹车,没有机械刹车,因此滑板车的刹车功能只能通过电机的反向制动力矩来实现驻车。但是在坡道路况上,滑板车往往会出现下滑力大于刹车力而导致滑板车无法停止下来,这就需要对原有的控制算法进行优化,使可以在不同坡道工况上输出对应的刹车电流(不超过最大刹车电流),让滑板车能够在坡道上停住。
2、存在问题:目前电子刹车常见的做法是速度环的给定速度为0,速度环的输出会给到电流环,速度环的kp不为0,ki为0。因为如果ki不为0的话会出现这样一个情况,滑板车速度为0的时候,速度环的输出依然是一个较大值,这会导致滑板车速度降为0以后速度往反方向运动。而如果ki为0,则会出现滑板车在坡道上无法驻车,始终有一个较低的速度进行滑动。对于电子刹车目前还有另一种方法,就是在刹车速度较低的时候使电机的三相进行短路,此时电机会产生较大的刹车力矩,但此力矩不可控,并且如果此时没有速度,将不会产生制动力矩,那么在坡道上并不能完全停止下来也会以一个较低的速度一直运动下去。
技术实现思路
1、本发明要解决的技术问题在于克服现有技术中四轮滑板车控制方法,无法实现在坡道驻车使其速度为0的问题,从而提供一种滑板车驻车控制方法和装置。
2、为解决上述技术问题,本发明公开实施例至少提供一种滑板车驻车控制方法和装置。
3、第一方面,本发明公开实施例提供了一种滑板车驻车控制方法,包括:
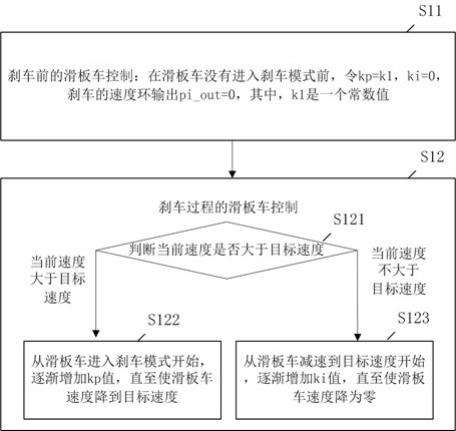
4、刹车前的滑板车控制:在滑板车没有进入刹车模式前,令kp=k1,ki=0,刹车的速度环输出pi_out=0,其中,k1是一个常数值;
5、刹车过程的滑板车控制;
6、所述刹车过程的滑板车控制包括:
7、判断当前速度是否大于目标速度;
8、若当前速度大于目标速度,则从滑板车进入刹车模式开始,逐渐增加kp值,直至使滑板车速度降到目标速度(3km/h);
9、若当前速度不大于目标速度,从滑板车减速到目标速度开始,保持kp不变,逐渐增加ki值,直至使滑板车速度降为零。
10、可选地,在从滑板车减速到目标速度开始,逐渐增加ki值,直至使滑板车速度降为零的过程中,对pi_out进行限幅。
11、可选地,所述逐渐增加kp为:按照线性增加规律逐渐增加kp,每次kp的累加值a根据实际的刹车效果进行确定。
12、可选地,所述逐渐增加ki为:按照线性增加规律逐渐增加ki,每次ki的累加值a根据实际的刹车效果进行确定。
13、可选地,在所述刹车过程的滑板车控制之前,所述方法还包括:判断滑板车当前是否进入刹车模式;若滑板车当前没有进入刹车模式,则重新初始化kp、ki、pi_out;所述刹车过程的滑板车控制为:若滑板车当前进入刹车模式,则进入所述刹车过程的滑板车控制。
14、第二方面,本发明公开实施例还提供一种滑板车驻车控制装置,包括:
15、刹车前的滑板车控制模块:在滑板车没有进入刹车模式前,令kp=k1,ki=0,刹车的速度环输出pi_out=0,其中,k1是一个常数值;
16、刹车过程的滑板车控制模块;
17、所述刹车过程的滑板车控制模块包括:
18、速度判断子模块,用于判断当前速度是否大于目标速度;
19、滑板车控制子模块,若当前速度大于目标速度,则从滑板车进入刹车模式开始,逐渐增加kp值,直至使滑板车速度降到目标速度(3km/h);若当前速度不大于目标速度,此时保持kp不变,逐渐增加ki值,直至使滑板车速度降为零。
20、可选地,所述滑板车控制子模块在从滑板车减速到目标速度开始,逐渐增加ki值,直至使滑板车速度降为零的过程中,对pi_out进行限幅,需要根据实际的测试结果来进行限幅,pi_out太小则会导致无法使车的速度降为0,pi_out太大则会导致车轮抱死。
21、可选地,还包括:判断模块,用于判断滑板车当前是否进入刹车模式;若滑板车当前没有进入刹车模式,则重新初始化kp、ki、pi_out;若滑板车收到刹车信号则当前进入刹车模式,则所述刹车过程的滑板车控制模块进入所述刹车过程的滑板车控制。
22、第三方面,本发明公开实施例还提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
23、第四方面,本发明公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
24、本发明的实施例提供的技术方案可以具有以下有益效果:
25、在滑板车没有进入刹车模式前,令kp=k1,ki=0,刹车的速度环输出pi_out=0,其中,k1是一个常数值;若当前速度大于目标速度,则从滑板车进入刹车模式开始,逐渐增加kp值,直至使滑板车速度降到目标速度(3km/h);若当前速度不大于目标速度,此时保持kp不变,逐渐增加ki值,直至使滑板车速度降为零,本方案在滑板车控制过程中,kp、ki都变成可调节的,通过调节kp(比例调节系数)、ki(积分调节系数)来使滑板车能够在坡道上进行驻车。
技术特征:
1.一种滑板车驻车控制方法,其特征在于,包括:
2.根据权利要求1所述的滑板车驻车控制方法,其特征在于,在从滑板车减速到目标速度开始,逐渐增加ki值,直至使滑板车速度降为零的过程中,对pi_out进行限幅。
3.根据权利要求2所述的滑板车驻车控制方法,其特征在于,所述逐渐增加kp为:按照线性增加规律逐渐增加kp。
4.根据权利要求3所述的滑板车驻车控制方法,其特征在于,所述逐渐增加ki为:按照线性增加规律逐渐增加ki。
5.根据权利要求4所述的滑板车驻车控制方法,其特征在于,在所述刹车过程的滑板车控制之前,所述方法还包括:
6.一种滑板车驻车控制装置,其特征在于,包括
7.根据权利要求6所述的滑板车驻车控制装置,其特征在于,所述滑板车控制子模块在从滑板车减速到目标速度开始,逐渐增加ki值,直至使滑板车速度降为零的过程中,对pi_out进行限幅。
8.根据权利要求7所述的滑板车驻车控制方法,其特征在于,还包括:
9.一种计算机设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如权利要求1至5中任一项所述滑板车驻车控制方法。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如权利要求1至5中任一项所述滑板车驻车控制方法。
技术总结
本发明涉及一种滑板车驻车控制方法和装置,涉及滑板车驻车控制技术,该方法刹车前的滑板车控制:在滑板车进入刹车模式前,令kp=k1,ki=0,刹车的速度环输出pi_out=0,其中,k1是一个常数值;在滑板车进入刹车模式后,给定速度为零,速度环的输出会给到电流环的输入;判断当前速度是否大于目标速度;若当前速度大于目标速度,则从滑板车进入刹车模式开始,逐渐增加kp值,直至使滑板车速度降到目标速度(3km/h);若当前速度不大于目标速度,此时保持kp不变,逐渐增加ki值,直至使滑板车速度降为零,通过对速度环的PI控制解决了在坡道上驻车使其速度为0的问题。
技术研发人员:黄锐,潘锐祥
受保护的技术使用者:深圳市好盈科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!