混合动力电动车辆及其动力控制方法与流程
本公开涉及一种混合动力电动车辆,其具有始终连接到发动机的第一电机和选择性地连接到发动机的第二电机。本公开还涉及一种用于该混合动力电动车辆的动力控制方法。该方法可以通过利用第一电机和第二电机来校正发动机的建模扭矩。
背景技术:
1、最近,随着人们对环境越来越感兴趣,以电机为动力源的环保车辆正在增加。环保车辆也被称为电气化车辆,其代表性的示例是混合动力电动车辆(hev)或电动车辆(ev)。
2、由于这样的电气化车辆设置有与传统内燃机(ice)车辆不同的电机,因此电气化车辆可以利用电机获得推进所需的动力。用由发动机和电机组成的两个动力源驱动的混合电动车辆可以根据在车辆驾驶期间发动机和电机如何和谐地操作来提供最佳的动力和扭矩。
3、特别是,在采用电机和发动机离合器(ec)安装在发动机和变速器之间的并联型(或变速器安装电驱动(transmission mounted electric drive,tmed)型)混合动力系统的混合动力电动车辆中,来自发动机的动力输出和来自电机的动力输出可以同时传输到驱动轴。
4、另一方面,当混合动力电动车辆利用发动机作为驱动源进行驱动时,存在的问题是,在发动机的指令扭矩和输出扭矩之间出现取决于发动机的规格和耐久性的误差。而且,还存在的另一问题是,这种误差导致在通过利用扭矩执行混合动力电动车辆的动力控制时控制的准确性下降。
5、上述内容只是为了帮助理解本公开的背景,并不旨在表示本公开属于本领域普通技术人员已知的相关技术的范围。
技术实现思路
1、因此,考虑在相关技术中出现的上述问题做出了本公开。本公开提供一种具有始终或保持连接到发动机的第一电机和选择性地连接到发动机的第二电机的混合动力电动车辆及其动力控制方法。该方法可以通过利用第一电机和第二电机学习发动机的实际扭矩来校正发动机建模扭矩。
2、本公开的目的不限于上述那些目的,并且本领域普通技术人员将从下文中提供的描述清楚地理解未提及的其它目的。
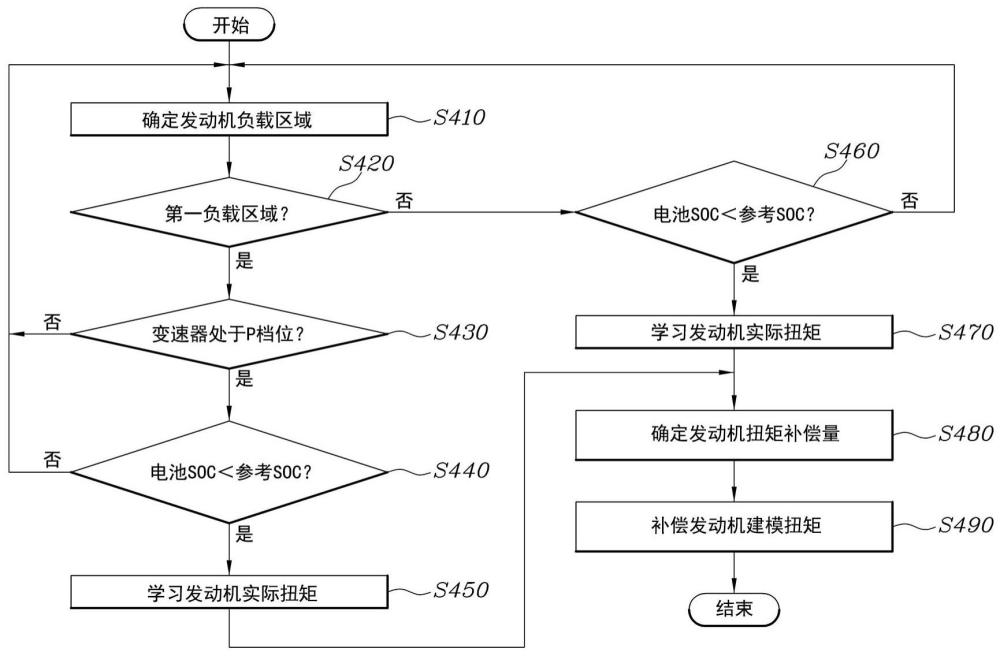
3、根据本公开的一个方面,一种混合动力电动车辆的动力控制方法包括:确定混合动力电动车辆的发动机负载区域;基于车辆中设置的多个电机中对应于发动机负载区域的至少一个电机的发电量来学习发动机的实际扭矩。该方法还包括基于利用电机学习的发动机的实际扭矩来补偿发动机建模扭矩。
4、例如,当混合动力电动车辆的累积里程超过参考里程或者驾驶员操纵车辆中设置的命令输入装置时,可以执行确定车辆的发动机负载区域。
5、在另一实施例中,确定车辆的发动机负载区域可以包括:当车辆的累积里程超过第一参考里程时,确定发动机负载区域为第一负载区域。确定车辆的发动机负载区域还可以包括:当车辆的累积里程超过小于第一参考里程的第二参考里程时,确定发动机负载区域为负载小于第一负载区域的负载的第二负载区域。
6、在一个实施例中,学习发动机的实际扭矩可以包括:当发动机负载区域为第一负载区域时,通过利用始终连接到发动机的第一电机和选择性地连接到发动机的第二电机来学习发动机的实际扭矩。
7、在一个实施例中,第一电机可以是位于发动机和发动机离合器之间的电机,第二电机可以是位于发动机离合器和变速器之间的电机。
8、在一个实施例中,学习发动机的实际扭矩可以包括:当发动机负载区域是第一负载区域、车辆的变速器处于驻车档位(p档位)并且电池的充电状态(soc)小于参考soc时,通过利用第一电机和第二电机来学习发动机的实际扭矩。
9、在一个实施例中,学习发动机的实际扭矩可以进一步包括:当发动机负载区域是第二负载区域时,通过利用始终连接到发动机的第一电机来学习发动机的实际扭矩。
10、在一个实施例中,学习发动机的实际扭矩可以包括:当发动机负载区域是第二负载区域并且电池的soc小于参考soc时,通过利用第一电机来学习发动机的实际扭矩。
11、在一个实施例中,补偿发动机建模扭矩可以包括:基于利用电机学习的发动机的实际扭矩来确定发动机扭矩补偿量;以及基于所确定的补偿量来补偿发动机建模扭矩。
12、在一个实施例中,发动机扭矩补偿量可以对应于所学习的发动机的实际扭矩和发动机建模扭矩之间的差值。
13、根据本公开的另一方面,一种混合动力电动车辆包括:发动机;第一电机,始终连接到发动机;第二电机,选择性地连接到发动机;以及控制器,被配置为确定车辆的发动机负载区域。控制器还被配置为基于车辆中设置的多个电机中对应于发动机负载区域的至少一个电机的发电量来学习发动机的实际扭矩。控制器还被配置为基于利用电机学习的发动机的实际扭矩来补偿发动机建模扭矩。
14、在一个实施例中,控制器可以在车辆的累积里程超过参考里程或者驾驶员操纵车辆中设置的命令输入装置时,确定发动机负载区域。
15、在一个实施例中,控制器可以在混合动力电动车辆的累积里程超过第一参考里程时,确定发动机负载区域为第一负载区域。控制器还可以在混合动力电动车辆的累积里程超过小于第一参考里程的第二参考里程时,确定发动机负载区域为负载小于第一负载区域的负载的第二负载区域。
16、在一个实施例中,控制器可以在发动机负载区域为第一负载区域时,通过利用始终连接到发动机的第一电机和选择性地连接到发动机的第二电机来学习发动机的实际扭矩。
17、在一个实施例中,控制器可以在发动机负载区域是第一负载区域、车辆的变速器处于p档位并且电池的soc小于参考soc时,通过利用第一电机和第二电机来学习发动机的实际扭矩。
18、在一个实施例中,控制器可以在发动机负载区域是第二负载区域时,通过利用始终连接到发动机的第一电机来学习发动机的实际扭矩。
19、在一个实施例中,控制器可以在发动机负载区域是第二负载区域并且电池的soc小于参考soc时,通过利用第一电机来学习发动机的实际扭矩。
20、在一个实施例中,控制器可以基于利用电机学习的发动机的实际扭矩来确定发动机扭矩补偿量,并且基于所确定的补偿量来补偿发动机建模扭矩。
21、根据本公开的混合动力电动车辆及其动力控制方法,通过利用第一电机和第二电机学习发动机的实际扭矩并基于所学习的发动机的实际扭矩补偿发动机建模扭矩,可以减小在执行车辆的动力控制时产生的误差。
22、本公开的效果不限于上述那些效果,并且本领域普通技术人员从下文中提供的描述清楚地理解未提及的其它效果。
技术特征:
1.一种动力控制方法,用于混合动力电动车辆,所述动力控制方法包括:
2.根据权利要求1所述的动力控制方法,其中,当所述混合动力电动车辆的累积里程超过参考里程或者驾驶员操纵所述混合动力电动车辆中设置的命令输入装置时,执行确定所述混合动力电动车辆的发动机负载区域。
3.根据权利要求2所述的动力控制方法,其中,确定所述混合动力电动车辆的发动机负载区域包括:
4.根据权利要求1所述的动力控制方法,其中,学习所述发动机的实际扭矩包括:
5.根据权利要求4所述的动力控制方法,其中,所述第一电机是位于所述发动机和发动机离合器之间的电机,所述第二电机是位于所述发动机离合器和变速器之间的电机。
6.根据权利要求4所述的动力控制方法,其中,学习所述发动机的实际扭矩包括:
7.根据权利要求1所述的动力控制方法,其中,学习所述发动机的实际扭矩进一步包括:
8.根据权利要求7所述的动力控制方法,其中,学习所述发动机的实际扭矩包括:
9.根据权利要求1所述的动力控制方法,其中,补偿所述发动机建模扭矩包括:
10.根据权利要求9所述的动力控制方法,其中,所述发动机扭矩补偿量对应于所学习的所述发动机的实际扭矩和所述发动机建模扭矩之间的差值。
11.一种混合动力电动车辆,包括:
12.根据权利要求11所述的混合动力电动车辆,其中,所述控制器进一步:在所述混合动力电动车辆的累积里程超过参考里程或者驾驶员操纵所述混合动力电动车辆中设置的命令输入装置时,确定所述发动机负载区域。
13.根据权利要求12所述的混合动力电动车辆,其中,所述控制器进一步在所述混合动力电动车辆的累积里程超过第一参考里程时,确定所述发动机负载区域为第一负载区域,并且所述控制器进一步在所述混合动力电动车辆的累积里程超过小于所述第一参考里程的第二参考里程时,确定所述发动机负载区域为第二负载区域。
14.根据权利要求11所述的混合动力电动车辆,其中,所述控制器进一步:在所述发动机负载区域为第一负载区域时,通过利用保持连接到所述发动机的第一电机和选择性地连接到所述发动机的第二电机来学习所述发动机的实际扭矩。
15.根据权利要求14所述的混合动力电动车辆,其中,所述控制器进一步:在所述发动机负载区域是所述第一负载区域、所述混合动力电动车辆的变速器处于驻车档位即p档位并且电池的充电状态即soc小于参考soc时,通过利用所述第一电机和所述第二电机来学习所述发动机的实际扭矩。
16.根据权利要求11所述的混合动力电动车辆,其中,所述控制器进一步:在所述发动机负载区域是第二负载区域时,通过利用保持连接到所述发动机的第一电机来学习所述发动机的实际扭矩。
17.根据权利要求16所述的混合动力电动车辆,其中,所述控制器进一步:在所述发动机负载区域是所述第二负载区域并且电池的soc小于参考soc时,通过利用所述第一电机来学习所述发动机的实际扭矩。
18.根据权利要求11所述的混合动力电动车辆,其中,所述控制器进一步基于利用所述电机学习的所述发动机的实际扭矩来确定发动机扭矩补偿量,并且所述控制器进一步基于所确定的发动机扭矩补偿量来补偿所述发动机建模扭矩。
技术总结
本公开提出一种混合动力电动车辆和混合动力电动车辆的动力控制方法。该动力控制方法包括:确定混合动力电动车辆的发动机负载区域;基于混合动力电动车辆中设置的多个电机中对应于发动机负载区域的至少一个电机的发电量来学习发动机的实际扭矩;以及基于利用电机学习的发动机的实际扭矩来补偿发动机建模扭矩。
技术研发人员:宋娴娜,崔宰荣,赵旻均
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!