基于主动稳定杆的轮式车辆控制方法、系统、车辆及存储介质与流程
本发明车辆行驶性能控制,具体涉及一种基于主动稳定杆的轮式车辆控制方法、系统、车辆及存储介质。
背景技术:
1、随着车辆动力性的增强,其在行驶过程中的高速场景会逐渐增加,对车辆的高速操纵稳定性要求会更加强烈。另一方面,随着汽车的普及,用户对车辆操控品质以及乘坐舒适性的需求也会日益提升。目前车辆普遍采用的被动式稳定杆无法根据车辆运动状态、路面激励、驾驶员操纵意图等进行自适应性调节,难以同时满足以上要求。
2、主动稳定杆可以对车辆主动施加经过计算的抗侧倾扭矩,实现任意时刻对车辆侧倾运动的控制。根据不同场景的需求,可以实现对载荷、轮胎力、簧上质量运动等车辆响应的优化,增强车辆操纵稳定性,提升用户在操控性、舒适性方面的体验。
3、目前主动稳定杆现有相关技术主要针对舒适性或操控性等特定性能进行优化,或针对有限数量的驾驶员输入与路面状态工况组合制定应对控制策略,均不存在应用于主动稳定杆的连续复合控制方法的描述。例如在发明专利申请“一种基于主动稳定杆的车辆综合控制方法及系统”(申请号:202211141512.0)中,公开了一种主动稳定杆的车辆综合控制方法及系统,将驾驶员操作意图划分为稳态、入弯、出弯3种情况,并将路面不平度划分为平路、不平路,从而组合出直线平路、直线不平路、缓弯平路、缓弯不平路、出急弯平路、入急弯平路、出急弯不平路、入急弯不平路和稳态弯心等9种工况,根据工况给稳定性、舒适性、敏捷性或通过性的控制算法输出分配预设的固定权重,复合计算出主动稳定杆输出扭矩。然而,在车辆实际行驶过程中,转向与路面的组合情况是复杂且随机的。将真实场景划分为有限个数工况的方式可能存在工况辨识不符合驾驶员预期的风险。并且,采用预设固定权重进行复合的方式不可避免地会带来车体响应特性的突变。
4、因此,有必要开发一种基于主动稳定杆的轮式车辆控制方法、系统、车辆及存储介质。
技术实现思路
1、本发明的目的在于提供一种基于主动稳定杆的轮式车辆控制方法、系统、车辆及存储介质,能协调并提升车辆行驶时的操纵稳定性与舒适性,并能在特定情况下使稳定杆表现出传统被动稳定杆的特性或者完全关闭稳定杆。
2、第一方面,本发明所述的一种基于主动稳定杆的轮式车辆控制方法,包括以下步骤:
3、获取车辆状态通信信号、悬架高度传感信号和惯性测量单元信号;
4、基于所获取的信号对系统状态进行诊断,确定系统运行状态,并根据系统诊断结果输出安全模式状态代码;
5、基于所获取的信号对车辆状态进行计算,得到车辆状态估算结果;
6、基于所获取的信号、车辆状态估算结果、安全模式状态代码确定各稳定杆操稳扭矩命令;
7、基于所获取的信号、车辆状态估算结果确定各稳定杆舒适性修正系数;
8、基于所获取的信号、车辆状态估算结果确定各稳定杆路面修正角、路面补偿命令;
9、基于所获取的信号、车辆状态估算结果、安全模式状态代码、各稳定杆操稳扭矩命令、舒适性修正系数、路面修正角、路面补偿命令计算各稳定杆扭矩命令。
10、可选地,所述车辆状态估算结果包括整车稳定杆抗侧倾扭矩总和反馈估算值、前轴轮心侧倾角估算值、后轴轮心侧倾角估算值、整车抗侧倾扭矩反馈估算值、前稳定杆扭转角度估算值、后稳定杆扭转角度估算值、整车地面侧倾角估算值、前轴地面侧倾角估算值和后轴地面侧倾角估算值。
11、可选地,获取的信号包括车速信号、簧上质量侧向加速度信号、簧上质量垂向加速度信号、簧上质量侧倾角度信号、簧上质量侧倾角速度信号、簧上质量俯仰角速度信号、簧上质量横摆角速度信号、方向盘角度信号、方向盘角速度信号、各车轮处悬架行程信号、各轴处稳定杆输出扭矩反馈信号、各轴处稳定杆扭转角度反馈信号、车身稳定系统激活标志位信号和驾驶模式代码。
12、第二方面,本发明所述的一种基于主动稳定杆的轮式车辆控制系统,包括:
13、悬架高度传感器组,用于感知各车轮处的悬架高度状态;
14、主动稳定杆复合连续控制装置,其包括控制器,以及分别与控制器连接的惯性测量单元和整车通讯接口,其中,所述整车通讯接口用于获取车辆状态通信信号,所述控制器被配置为能执行如本发明所述的基于主动稳定杆的轮式车辆控制方法的步骤;
15、前稳定杆总成,其包括前稳定杆电机总成、前稳定杆执行控制器、前稳定杆左半杆和前稳定杆右半杆;所述前稳定杆执行控制器接收来自控制器的指令,经过运算后控制前稳定杆电机总成产生对应扭矩,并通过前稳定杆左半杆与前稳定杆右半杆将扭矩转换为压力传递至前轴左侧簧下质量与前轴右侧簧下质量;
16、以及后稳定杆总成,其包括后稳定杆电机总成、后稳定杆执行控制器、后稳定杆左半杆和后稳定杆右半杆,后稳定杆总成通过后稳定杆执行控制器接收来自控制器的指令,经过运算后控制后稳定杆电机总成产生对应扭矩,并通过后稳定杆左半杆与后稳定杆右半杆将扭矩转换为压力传递至后轴左侧簧下质量与后轴右侧簧下质量。
17、可选地,所述惯性测量单元用于测量每一时刻车辆的簧上质量侧向加速度测量信号、簧上质量垂向加速度测量信号、簧上质量横摆角速度测量信号、簧上质量俯仰角速度测量信号、簧上质量侧倾角速度测量信号、簧上质量侧倾角度测量信号,并传递至控制器。
18、可选地,所述整车通讯接口用于将车速、方向盘角度、方向盘角速度、驾驶模式代码、车身稳定控制激活标志位信号传递至控制器。
19、可选地,所述前稳定杆执行控制器还用于计算每一时刻前稳定杆电机总成实际对外输出的扭矩,并基于计算出的前稳定杆电机总成的实际对外输出的扭矩产生前稳定杆输出扭矩反馈信号并传递至控制器。
20、可选地,所述前稳定杆执行控制器还用于测量前稳定杆电机总成的转子相对于默认工作位置实际旋转的角度,并基于测量的角度产生前稳定杆扭转角度反馈信号并传递至控制器。
21、可选地,所述后稳定杆执行控制器还用于计算每一时刻后稳定杆电机总成实际对外输出的扭矩,并基于计算出的后稳定杆电机总成实际对外输出的扭矩产生后稳定杆输出扭矩反馈信号并传递至控制器。
22、可选地,所述后稳定杆执行控制器还用于测量后稳定杆电机总成的转子相对于默认工作位置实际旋转的角度,并基于测量的角度产生后稳定杆扭转角度反馈信号并传递至控制器。
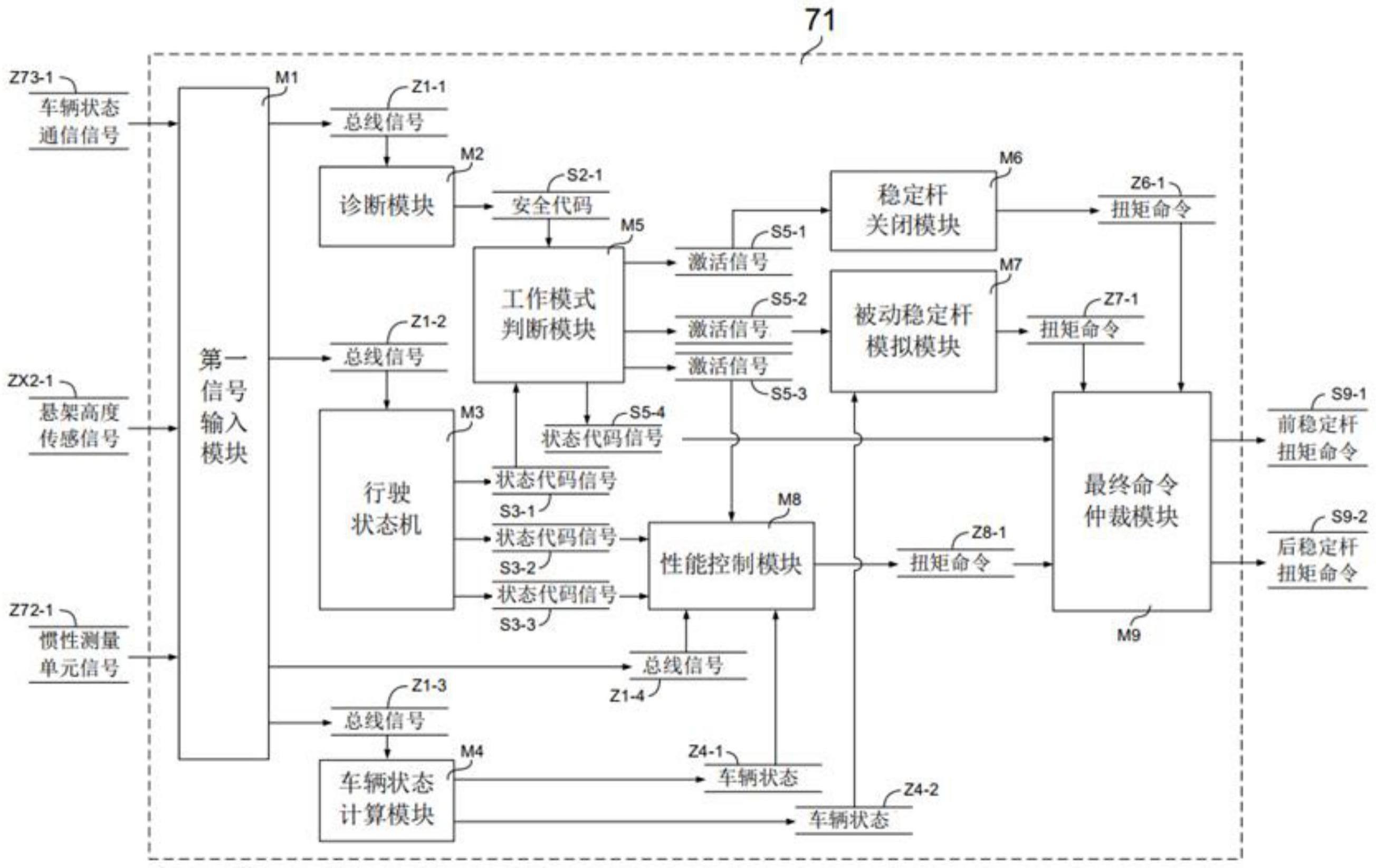
23、可选地,所述控制器包括第一信号输入模块、诊断模块、行驶状态机、车辆状态计算模块、工作模式判断模块、稳定杆关闭模块、被动稳定杆模拟模块、性能控制模块和最终命令仲裁模块;其中,第一信号输入模块分别与诊断模块、行驶状态机、车辆状态计算模块连接,诊断模块和工作模式判断模块连接,行驶状态机分别与工作模式判断模块、性能控制模块连接,工作模式判断模块分别与稳定杆关闭模块、被动稳定杆模拟模块、性能控制模块和最终命令仲裁模块连接,性能控制模块分别与车辆状态计算模块、最终命令仲裁模块、第一信号输入模块连接,最终命令仲裁模块还分别与稳定杆关闭模块、被动稳定杆模拟模块连接;
24、所述第一信号输入模块接收来自整车通讯接口的车辆状态通信信号z73-1、悬架高度传感器组输出的悬架高度传感信号zx2-1和惯性测量单元输出惯性测量单元信号z72-1作为输入,经过处理后产生总线信号z1-1、总线信号z1-2、总线信号z1-3和总线信号z1-4,并将总线信号z1-1传递至诊断模块,总线信号z1-2传递至行驶状态机,总线信号z1-3传递至车辆状态计算模块,总线信号z1-4传输至并性能控制模块;
25、所述诊断模块基于输入的总线信号z1-1对系统状态进行判断,基于判断结果产生安全代码s2-1并传递至工作模式判断模块;
26、所述行驶状态机基于输入的总线信号z1-2进行判断,基于判断结果产生状态代码信号s3-1、状态代码信号s3-2和状态代码信号s3-3,并将状态代码信号s3-1传递至工作模式判断模块,工作模式判断模块基于状态代码信号s3-1产生状态代码信号s5-4并传递至最终命令仲裁模块;将状态代码信号s3-2、状态代码信号s3-3传递至性能控制模块;
27、车辆状态计算模块基于输入总线信号z1-3进行计算,基于计算结果产生车辆状态z4-1、车辆状态z4-2,并将车辆状态z4-1传递至性能控制模块,将车辆状态z4-2传递至被动稳定杆模拟模块;
28、工作模式判断模块基于安全代码s2-1与状态代码信号s3-1进行判断,并基于判断结果产生激活信号s5-1或激活信号s5-2或激活信号s5-3;当激活信号s5-1有效时,稳定杆关闭模块将被执行,稳定杆关闭模块产生扭矩命令z6-1并传递至最终命令仲裁模块;当激活信号s5-2有效时,被动稳定杆模拟模块将被执行,被动稳定杆模拟模块基于车辆状态z4-2进行计算,产生扭矩命令z7-1并传递至最终命令仲裁模块;当激活信号s5-3有效时,性能控制模块将被执行,性能控制模块基于总线信号z1-4与车辆状态z4-1进行计算,产生扭矩命令z8-1并传递至最终命令仲裁模块。
29、可选地,所述行驶状态机包括第一判断模块、协同模式状态模块、独立状态识别模块、第一状态代码储存器、第二状态代码储存器和第三状态代码储存器,第一判断模块与协同模式状态模块、独立状态识别模块连接,协同模式状态模块与第一状态代码储存器连接,独立状态识别模块分别与第一状态代码储存器、第二状态代码储存器和第三状态代码储存器连接;
30、所述第一判断模块对车身稳定控制激活标志位信号s1-19进行判断;当车身稳定控制激活标志位信号s1-19值为1时,执行协同模式状态模块,当车身稳定控制激活标志位信号s1-19值不为1时,执行独立状态识别模块,该独立状态识别模块将车速信号s1-9、方向盘角速度信号s1-11、簧上质量侧向加速度测量信号s1-12、簧上质量横摆角速度测量信号s1-14作为输入;所述第一状态代码储存器、第二状态代码储存器、第三状态代码储存器在每一运行周期向行驶状态机外部输出状态代码信号s3-1、状态代码信号s3-2、状态代码信号s3-3。
31、可选地,所述独立状态识别模块包括参考横摆角速度计算模块、第二判断模块、极限操稳模块、非极限操稳模块和偏差距离产生模块,参考横摆角速度计算模块与偏差距离产生模块连接,偏差距离产生模块与第二判断模块连接,第二判断模块分别与极限操稳模块、非极限操稳模块连接;
32、所述参考横摆角速度计算模块根据簧上质量侧向加速度测量信号s1-12、车速信号s1-9计算产生参考横摆角速度信号s331-1;
33、所述偏差距离产生模块将参考横摆角速度信号s331-1与簧上质量横摆角速度测量信号s1-14作差取绝对值,产生偏差距离信号s330-1;
34、所述第二判断模块对偏差距离信号s330-1、车速信号s1-9进行判断,当偏差距离信号s330-1大于角速度阈值ⅰ且车速信号s1-9大于车速阈值ⅰ时,执行极限操稳模块,该极限操稳模块产生状态代码ⅴ并传递至第二状态代码储存器,极限操稳模块产生状态代码ⅵ并传递至第三状态代码储存器;当偏差距离信号s330-1小于角速度阈值ii或车速信号s1-9小于车速阈值ii时,执行非极限操稳模块,该非极限操稳模块接收车速信号s1-9、方向盘角速度信号s1-11并作为输入。
35、可选地,所述非极限操稳模块包括第一查表模块、第三判断模块、第二查表模块和第四判断模块,第一查表模块与第三判断模块连接;第三判断模块与第二状态代码储存器连接;
36、第二查表模块与第四判断模块连接,第四判断模块与第三状态代码储存器连接;
37、第一查表模块基于车速信号s1-9产生角速度阈值s3341-1并传递至第三判断模块;第三判断模块基于方向盘角速度信号s1-11与角速度阈值s3341-1进行判断,当方向盘角速度信号s1-11大于角速度阈值s3341-1时,将状态代码ⅰ传递至第二状态代码储存器,否则将状态代码ii传递至第二状态代码储存器;
38、第二查表模块基于车速信号s1-9产生角速度阈值s3343-1并传递至第四判断模块;第四判断模块基于方向盘角速度信号s1-11与角速度阈值s3343-1进行判断,当方向盘角速度信号s1-11大于角速度阈值s3343-1时,将状态代码ⅲ传递至第三状态代码储存器,否则将状态代码ⅳ传递至第三状态代码储存器。
39、可选地,所述性能控制模块包括第二信号输入模块、操稳模块、舒适性模块、路面模块、行程末端缓冲模块、抗轮胎离地模块和扭矩命令合成模块;第二信号输入模块分别与操稳模块、舒适性模块、路面模块、行程末端缓冲模块、抗轮胎离地模块连接,操稳模块、舒适性模块、路面模块、行程末端缓冲模块、抗轮胎离地模块分别与扭矩命令合成模块连接;
40、所述第二信号输入模块接收总线信号z1-4与车辆状态z4-1进行计算,产生总线信号z81-1、总线信号z81-2、总线信号z81-3、总线信号z81-4、总线信号z81-5,并将总线信号z81-1传递至操稳模块,将总线信号z81-2传递至舒适性模块,将总线信号z81-3传递至路面模块,将总线信号z81-4传递至行程末端缓冲模块,将总线信号z81-5传递至抗轮胎离地模块;
41、所述操稳模块基于状态代码信号s3-2、状态代码信号s3-3和总线信号z81-1进行计算,产生扭矩信号s82-1、扭矩信号s82-2并传递至扭矩命令合成模块;舒适性模块基于总线信号z81-2产生系数s83-1、系数s83-2并传递至扭矩命令合成模块;路面模块基于总线信号z81-3产生扭矩信号s84-1、扭矩信号s84-2、角度信号s84-3、角度信号s84-4并传递至扭矩命令合成模块;行程末端缓冲模块基于总线信号z81-4产生扭矩信号s85-1、扭矩信号s85-2并传递至扭矩命令合成模块;抗轮胎离地模块基于总线信号z81-5产生系数s86-1、系数s86-2并传递至扭矩命令合成模块;扭矩命令合成模块基于输入信号进行计算,产生扭矩命令z8-1,该扭矩命令z8-1被输出至性能控制模块外部。
42、可选地,所述扭矩命令合成模块包括第三查表模块、第一求和模块、第四查表模块、第二求和模块和总线合成模块;
43、将扭矩信号s82-1与系数s83-1相乘得到信号s870-1;角度信号s84-3在限值后被传递至第三查表模块,该第三查表模块基于角度信号s84-3产生信号s871-1;数值1减去信号s871-1的差与信号s870-1相乘得到信号s870-2;信号s871-1与扭矩信号s84-1相乘产生信号s870-3;在第一求和模块处信号s870-2、信号s870-3与扭矩值ⅰ、扭矩信号s85-1相加,产生信号s872-1,该信号s872-1与系数s86-1相乘得到前稳定杆操稳扭矩命令s870-4;
44、将扭矩信号s82-2与系数s83-2相乘得到信号s870-5;角度信号s84-4在限值后被传递至第四查表模块,该第四查表模块基于角度信号s84-4产生信号s873-1;数值1减去信号s873-1的差与信号s870-5相乘得到信号s870-6;信号s873-1与扭矩信号s84-2相乘产生信号s870-7;在第二求和模块处信号s870-6、信号s870-7与扭矩值ii、扭矩信号s85-2相加,产生信号s874-1,该信号s874-1与系数s86-2相乘得到后稳定杆操稳扭矩命令s870-8;
45、在总线合成模块处前稳定杆操稳扭矩命令s870-4与后稳定杆操稳扭矩命令s870-8组成扭矩命令总线信号z8-1并输出至扭矩命令合成模块外部。
46、可选地,所述最终命令仲裁模块包括第五判断模块、信号合并与选择模块、第一斜率限制模块、第一限值模块、第二斜率限制模块、第二限值模块、第一信号传递模块、第二信号传递模块和第三信号传递模块,第五判断模块分别与第一信号传递模块、第二信号传递模块和第三信号传递模块连接,第一信号传递模块、第二信号传递模块和第三信号传递模块分别与信号合并与选择模块连接,信号合并与选择模块分别与第一斜率限制模块、第二斜率限制模块连接,第一斜率限制模块与第一限值模块连接,第二斜率限制模块与第二限值模块连接;
47、所述第五判断模块基于状态代码信号s5-4进行判断,当状态代码信号s5-4值为状态代码ⅶ时,将扭矩命令z6-1传递至信号合并与选择模块;当状态代码信号s5-4值为状态代码ⅷ时,将扭矩命令z7-1传递至信号合并与选择模块;当状态代码信号s5-4值为状态代码ⅸ时,将扭矩命令z8-1传递至信号合并与选择模块;信号合并与选择模块产生前稳定杆扭矩目标信号s92-1,该前稳定杆扭矩目标信号s92-1经第一斜率限制模块限制斜率、第一限值模块限值后产生前稳定杆最终扭矩命令s9-1并传递至最终命令仲裁模块外部。信号合并与选择模块产生后稳定杆扭矩目标信号s92-2,该后稳定杆扭矩目标信号s92-2经第二斜率限制模块限制斜率、经第二限值模块限值后产生后稳定杆最终扭矩命令s9-2并传递至最终命令仲裁模块外部。
48、第三方面,本发明所述的一种车辆,采用如本发明所述的基于主动稳定杆的轮式车辆控制系统。
49、第四方面,本发明所述的一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本发明所述的基于主动稳定杆的轮式车辆控制方法的步骤。
50、本发明具有以下优点:本发明在系统诊断结果正常的情况下通过命令合成算法将针对操纵稳定性、舒适性、路面状态的控制命令进行集成,从而提升了车辆行驶时的操纵稳定性与舒适性。并在系统诊断结果异常的情况下根据异常状态等级模拟预设的被动稳定杆外特性或完全断开稳定杆左右半杆;同时,在车身稳定系统激活的情况下模拟预设的被动稳定杆外特性。
- 还没有人留言评论。精彩留言会获得点赞!