自动驾驶车辆的控制方法及装置与流程
本申请涉及自动驾驶,特别是涉及一种自动驾驶车辆的控制方法及装置。
背景技术:
1、自动驾驶车辆依靠感知传感器、人工智能、全球定位系统等协同合作,使得车辆安全自动行驶。自动驾驶车辆的系统主要包含感知、决策和执行三个主要功能。目前自动驾驶技术的重点是致力于实现“无人驾驶”,除了出于必要的安全风险考虑之外,不做人工干预。然而自动驾驶车辆在行驶过程中可能会碰到一些特定路况超出自动驾驶车辆的处理能力,为了保障通行安全,自动驾驶车辆会采取降速或停车策略,造成自动驾驶车辆长时间无法通行。例如,在一个足够通行的狭窄空间,因为定位或传感器检测的误差限制,而采用停车策略。再例如,与其他交通参与者抢道的场景下,始终处于让路状态而无法通行。
2、对于存在时效要求的服务场景下,上述特定路况超出自动驾驶车辆的处理能力时,长时间的降速或无法通行会造成自动驾驶车辆无法满足时效性要求。面对这种情况,自动驾驶车辆的服务提供商大多致力于在研发阶段花费更多的资源来提高自动驾驶车辆在上述特殊路况下的算法精度,研发成本更高。
技术实现思路
1、有鉴于此,本申请提供了一种自动驾驶车辆的控制方法及装置,以便于提高自动驾驶车辆在行驶过程中的时效性。
2、本申请提供了如下方案:
3、第一方面,提供了一种自动驾驶车辆的控制方法,所述方法包括:
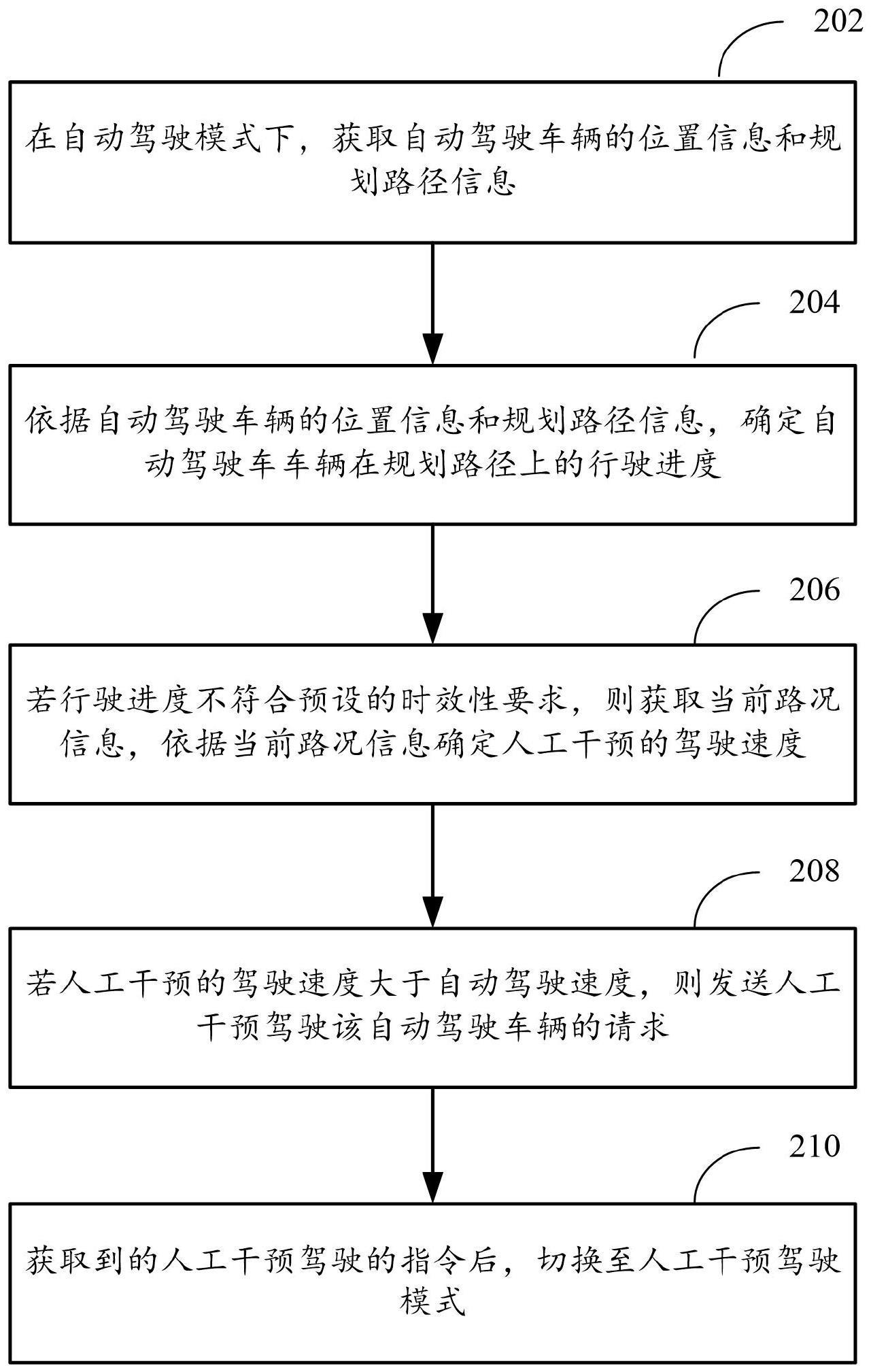
4、在自动驾驶模式下,获取自动驾驶车辆的位置信息和规划路径信息;
5、依据所述自动驾驶车辆的位置信息和规划路径信息,确定所述自动驾驶车车辆在规划路径上的行驶进度;
6、若所述行驶进度不符合预设的时效性要求,则获取当前路况信息,依据当前路况信息确定人工干预的驾驶速度;
7、若所述人工干预的驾驶速度大于自动驾驶速度,则发送人工干预驾驶所述自动驾驶车辆的请求,以便于所述自动驾驶车辆获取到的人工干预驾驶的指令后,切换至人工干预驾驶模式。
8、根据本申请实施例中一可实现的方式,所述规划路径信息包括在规划路径上包含的预设途径点的位置信息以及途经点对应的耗时阈值;
9、依据所述自动驾驶车辆的位置信息和规划路径信息,确定所述自动驾驶车辆在规划路径上的行驶进度包括:获取所述自动驾驶车辆经过所述途经点时在所述规划路径上的耗时,若耗时超过该途经点对应的耗时阈值,则确定行驶进度不符合预设的时效性要求。
10、根据本申请实施例中一可实现的方式,所述依据当前路况信息确定人工干预的驾驶速度包括:
11、依据预设的路况与人工干预的驾驶速度的对应关系,确定当前路况信息对应的驾驶速度,所述对应关系是依据历史统计数据预先建立的;或者,
12、依据所述自动驾驶车辆对应的驾驶员或远程控制员针对所述当前路况信息的历史驾驶参数预估所述人工干预的驾驶速度。
13、根据本申请实施例中一可实现的方式,所述方法还包括:
14、在人工干预驾驶模式下,获取当前路况信息,依据当前路况信息确定自动驾驶速度;
15、若确定的自动驾驶速度大于人工干预驾驶模式下的驾驶速度,则发送释放人工干预驾驶所述自动驾驶车辆的请求,以便于所述自动驾驶车辆获取到释放人工干预驾驶所述自动驾驶车辆的指令后,切换至自动驾驶模式。
16、根据本申请实施例中一可实现的方式,在检测到路况信息发生变化时,执行所述依据当前路况信息确定自动驾驶速度的步骤;或者,
17、在所述自动驾驶车辆在规划路径上的行驶进度符合预设的时效性要求时,执行所述依据当前路况信息确定自动驾驶速度的步骤。
18、根据本申请实施例中一可实现的方式,所述请求发送至所述自动驾驶车辆的控制终端;
19、所述控制终端为远程控制终端,在人工干预驾驶模式下,依据远程控制终端发送的包含驾驶参数的指令控制所述自动驾驶车辆;或者,所述控制终端设置于所述自动驾驶车辆,在人工干预驾驶模式下,由人工驾驶所述自动驾驶车辆。
20、根据本申请实施例中一可实现的方式,所述方法应用于物流配送场景,所述规划路径信息包括物流配送路径信息和配送时效性要求。
21、第二方面,提供了一种自动驾驶车辆的控制装置,所述装置包括:
22、信息获取单元,被配置为获取自动驾驶车辆的位置信息和规划路径信息;
23、进度识别单元,被配置为依据所述自动驾驶车辆的位置信息和规划路径信息,确定所述自动驾驶车车辆在规划路径上的行驶进度;
24、干预实现单元,被配置为在自动驾驶模式下,若行驶进度不符合预设的时效性要求,则获取当前路况信息,依据当前路况信息确定人工干预的驾驶速度;若所述人工干预的驾驶速度大于自动驾驶速度,则发送人工干预驾驶所述自动驾驶车辆的请求,以便于所述自动驾驶车辆获取到的人工干预驾驶的指令后,切换至人工干预驾驶模式。
25、根据第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一方面中任一项所述的方法的步骤。
26、根据第四方面,提供了一种电子设备,包括:
27、一个或多个处理器;以及
28、与所述一个或多个处理器关联的存储器,所述存储器用于存储程序指令,所述程序指令在被所述一个或多个处理器读取执行时,执行上述第一方面中任一项所述的方法的步骤。
29、根据本申请提供的具体实施例,本申请公开了以下技术效果:
30、1)本申请打破了传统致力于无人驾驶的思路,而是提供了一种全新的思路,在自动驾驶模式下行驶进度不符合预设的时效性要求时,能够依据当前路况信息确定人工干预的驾驶速度,并在人工干预的驾驶速度大于自动驾驶速度的情况下能够发送人工干预驾驶自动驾驶车辆的请求,以切换至人工干预驾驶模式,从而避免特殊路况造成的自动驾驶车辆长时间降速或无法通行的情况,提高自动驾驶车辆在行驶过程中的时效性。
31、2)在人工干预驾驶模式下,能够在自动驾驶速度大于人工干预驾驶模式下的驾驶速度时,及时释放人工干预驾驶,以使得自动驾驶车辆切换回自动驾驶模式。这种方式能够尽量减少对人力资源的占用,把人工干预作为一种与自动驾驶技术能力互补的方法,结合自动驾驶技术以及人工干预的优点,同时兼顾驾驶效率和安全性。
32、3)这种在特殊路况下采用人工干预的方式切入自动驾驶路线中,并在路况变化后及时切回自动驾驶模式,通过这种方式能够有效降低研发阶段为解决这种特殊路况问题而花费的大量研发成本。
33、当然,实施本申请的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种自动驾驶车辆的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述规划路径信息包括在规划路径上包含的预设途径点的位置信息以及途经点对应的耗时阈值;
3.根据权利要求1所述的方法,其特征在于,所述依据当前路况信息确定人工干预的驾驶速度包括:
4.根据权利要求1所述的方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,在检测到路况信息发生变化时,执行所述依据当前路况信息确定自动驾驶速度的步骤;或者,
6.根据权利要求1或4所述的方法,其特征在于,所述请求发送至所述自动驾驶车辆的控制终端;
7.根据权利要求1至5中任一项所述的方法,其特征在于,所述方法应用于物流配送场景,所述规划路径信息包括物流配送路径信息和配送时效性要求。
8.一种自动驾驶车辆的控制装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
10.一种电子设备,其特征在于,包括:
技术总结
本申请实施例公开了一种自动驾驶车辆的控制方法及装置,涉及自动驾驶技术领域。本申请提供的技术方案中,在自动驾驶模式下行驶进度不符合预设的时效性要求时,能够依据当前路况信息确定人工干预的驾驶速度,并在人工干预的驾驶速度大于自动驾驶速度的情况下能够发送人工干预驾驶自动驾驶车辆的请求,以切换至人工干预驾驶模式,从而避免特殊路况造成的自动驾驶车辆长时间降速或无法通行的情况,提高自动驾驶车辆在行驶过程中的时效性。
技术研发人员:吴谢浩,黄瑞斌,兰琛,王延,周珏,张震,刘汶鑫,石汉路,高俊龙,郭超,李耿亮,郭振宇
受保护的技术使用者:阿里巴巴达摩院(杭州)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!