一种无GPS信号下车辆行驶轨迹的评估方法、装置与流程
本发明涉及车辆的,具体涉及一种无gps信号下车辆行驶轨迹的评估方法、装置。
背景技术:
1、随着无人驾驶技术的不断发展,车辆的驾驶分类逐渐分属为自动行车与自动泊车两个方向。自动泊车简称apa(自动泊车辅助系统,auto parking assist),是一种可以不需要人工干预,通过车载传感器、处理器和控制系统的帮助就可以实现自动识别车位,并自动完成泊车入位的一种方法。
2、自动泊车系统主要是根据自身四周环布的各类传感器设备,特别是基于视觉的单目或者双目相机传感器系统。这些传感器设备获取自身与四周环境的图像、相对位置情况和转角等,判断当前的车的情况。同时,进行相关车位的识别,分析路径,进行规划,将控制指令传输给执行设备,实时传输,最后实现相关的泊车任务。
3、目前,基于l3或l3+级别的自动泊车方法,暂时依赖于高精地图的覆盖。而在无高精地图覆盖的相关区域,特别是地下停车场等封闭环境,则需要先行进行相关的建图操作。
4、由于地下环境缺少gps(global positioning system,全球定位系统)信号,仅能依靠航迹推算、图像等传感设备进行推理建图。但由于车辆在停车场常会走出“蛇形”的“直线”路径,因此无法准确判断估计路段是直线路段还是转弯路段。
5、为了能准确判断估计路段是直线路段还是转弯路段,可以通过增加大量的图像数据,或者额外设置其他传感器来实现;但是,这两种方式一方面可能影响到判断的效率,另一方面可能增加额外的成本。
技术实现思路
1、鉴于上述问题,提出了以便提供克服上述问题或者至少部分地解决上述问题的一种无gps信号下车辆行驶轨迹的评估方法、装置,包括:
2、一种无gps信号下车辆行驶轨迹的评估方法,所述方法包括:
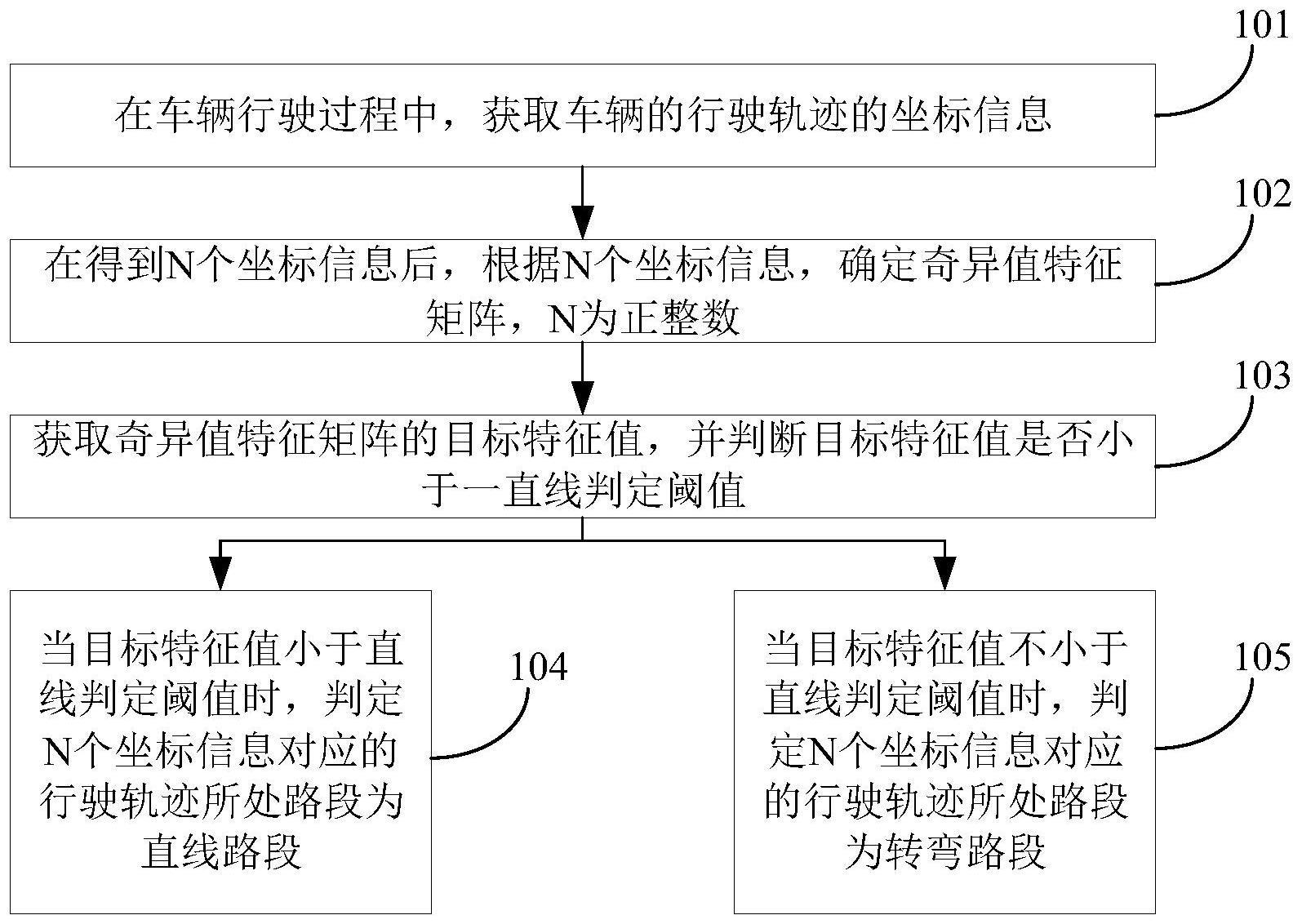
3、在车辆行驶过程中,获取所述车辆的行驶轨迹的坐标信息;
4、在得到n个坐标信息后,根据所述n个坐标信息,确定奇异值特征矩阵,所述n为正整数;
5、获取所述奇异值特征矩阵的目标特征值,并判断所述目标特征值是否小于一直线判定阈值;
6、当所述目标特征值小于所述直线判定阈值时,判定所述n个坐标信息对应的行驶轨迹所处路段为直线路段;
7、当所述目标特征值不小于所述直线判定阈值时,判定所述n个坐标信息对应的行驶轨迹所处路段为转弯路段。
8、可选地,所述方法还包括:
9、确定所述行驶轨迹对应的所有坐标信息所对应的目标特征值;
10、根据所述所有坐标信息所对应的目标特征值,以及一预设参考值,确定所述直线判定阈值。
11、可选地,所述方法还包括:
12、针对直线路线,采用所述直线路段对应的n个坐标信息所对应的图像数据中的第一预设比例的图像数据,对所述直线路段进行构图;
13、针对转弯路段,采用所述转弯路段对应的n个坐标信息所对应的图像数据中的第二预设比例的图像数据,对所述转弯路段进行构图;
14、其中,所述第一预设比例小于所述第二预设比例。
15、可选地,所述获取所述车辆的行驶轨迹的坐标信息,包括:
16、以所述车辆的当前位置为坐标系原点,获取所述车辆的行驶轨迹的坐标信息。
17、可选地,所述方法还包括:
18、当上一路段的类型与当前路段的类型不同时,以当前路段对应的车辆位置作为原点建立坐标系原点。
19、可选地,所述获取所述奇异值特征矩阵的目标特征值,并判断所述目标特征值是否小于直线判定阈值,包括:
20、获取所述奇异值特征矩阵的目标特征值,将所述目标特征值填入判别式中;
21、当所述判别式中存有至少m个目标特征值时,判断当前得到的目标特征值是否小于直线判定阈值;
22、其中,m为正整数。
23、可选地,所述获取所述车辆的行驶轨迹的坐标信息,包括:
24、从预设的传感器中,收集目标传感器数据;
25、根据所述目标传感器数据,计算所述车辆的行驶轨迹的坐标信息。
26、可选地,所述预设传感器包括以下至少一种:
27、惯性传感器、轮速计。
28、可选地,所述从预设的传感器中,收集目标传感器数据,包括:
29、获取所述预设的传感器所采集到的数据;
30、对所述数据进行去噪,以得到目标传感数据。
31、本发明还提供了一种无gps信号下车辆行驶轨迹的评估装置,所述装置包括:
32、获取模块,用于在车辆行驶过程中,获取所述车辆的行驶轨迹的坐标信息;
33、奇异值特征举证确定模块,用于在得到n个坐标信息后,根据所述n个坐标信息,确定奇异值特征矩阵,所述n为正整数;
34、判断模块,用于获取所述奇异值特征矩阵的目标特征值,并判断所述目标特征值是否小于一直线判定阈值;
35、第一判定模块,用于当所述目标特征值小于所述直线判定阈值时,判定所述n个坐标信息对应的行驶轨迹所处路段为直线路段;
36、第二判定模块,用于当所述目标特征值不小于所述直线判定阈值时,判定所述n个坐标信息对应的行驶轨迹所处路段为转弯路段。
37、可选地,所述装置还包括:
38、阈值确定模块,用于确定所述行驶轨迹对应的所有坐标信息所对应的目标特征值;根据所述所有坐标信息所对应的目标特征值,以及一预设参考值,确定所述直线判定阈值。
39、可选地,所述装置还包括:
40、第一构图模块,用于针对直线路线,采用所述直线路段对应的n个坐标信息所对应的图像数据中的第一预设比例的图像数据,对所述直线路段进行构图;
41、第二构图模块,用于针对转弯路段,采用所述转弯路段对应的n个坐标信息所对应的图像数据中的第二预设比例的图像数据,对所述转弯路段进行构图;
42、其中,所述第一预设比例小于所述第二预设比例。
43、可选地,所述获取模块,用于以所述车辆的当前位置为坐标系原点,获取所述车辆的行驶轨迹的坐标信息。
44、可选地,所述装置还包括:
45、坐标重建模块,用于当上一路段的类型与当前路段的类型不同时,以当前路段对应的车辆位置作为原点建立坐标系原点。
46、可选地,所述判断模块,用于获取所述奇异值特征矩阵的目标特征值,将所述目标特征值填入判别式中;当所述判别式中存有至少m个目标特征值时,判断当前得到的目标特征值是否小于直线判定阈值;其中,m为正整数。
47、可选地,所述获取模块,用于从预设的传感器中,收集目标传感器数据;根据所述目标传感器数据,计算所述车辆的行驶轨迹的坐标信息。
48、可选地,所述预设传感器包括以下至少一种:
49、惯性传感器、轮速计。
50、可选地,所述获取模块,用于获取所述预设的传感器所采集到的数据;对所述数据进行去噪,以得到目标传感数据。
51、本发明还提供了一种车辆,其特征在于,包括处理器、存储器及存储在所述存储器上并能够在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上的无gps信号下车辆行驶轨迹的评估方法。
52、本发明还提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上的无gps信号下车辆行驶轨迹的评估方法。
53、本发明的有益效果:
54、本发明中,在车辆行驶过程中,获取车辆的行驶轨迹的坐标信息;在得到n个坐标信息后,根据n个坐标信息,确定奇异值特征矩阵,n为正整数;获取奇异值特征矩阵的目标特征值,并判断目标特征值是否小于一直线判定阈值;当目标特征值小于直线判定阈值时,判定n个坐标信息对应的行驶轨迹所处路段为直线路段;当目标特征值不小于直线判定阈值时,判定n个坐标信息对应的行驶轨迹所处路段为转弯路段。通过本发明实施例,可以仅基于车辆现有传感器所获取到的行驶轨迹,来判断车辆的轨迹所对应的路段是直线路段还是转弯路段;从而实现了在无gps信号场景,低成本、高效率的车辆行驶轨迹的评估;且该低成本、高效率的车辆行驶轨迹的评估方法应用于自动驾驶的构图场景中,可以降低构图的成本,以及提高构图的效率。
- 还没有人留言评论。精彩留言会获得点赞!