车辆及其控制方法、计算机可读存储介质与流程
本发明涉及车辆,特别涉及一种车辆及其控制方法、计算机可读存储介质。
背景技术:
1、车辆在拥堵路段行驶的过程中,车辆的驾驶员通常会踩踏车辆的油门(也可以称为加速踏板)以紧跟前车,从而避免其他车道的车辆加塞,影响车辆的行驶速度。
2、但是,在驾驶员控制车辆紧跟前车的过程中,可能会出现因车辆加速而出现车辆追尾的现象。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明提出了一种车辆及其控制方法、计算机可读存储介质,车辆在跟随前车行驶的过程中可以接收加速指令,并能够在确定该车辆与前车的距离小于安全距离阈值的情况下,禁止响应加速踏板的加速指令。如此,可以避免因车辆加速而导致车辆追尾前车,从而可以确保车辆的安全行驶。
2、一方面,提供了一种车辆的控制方法,所述方法包括:
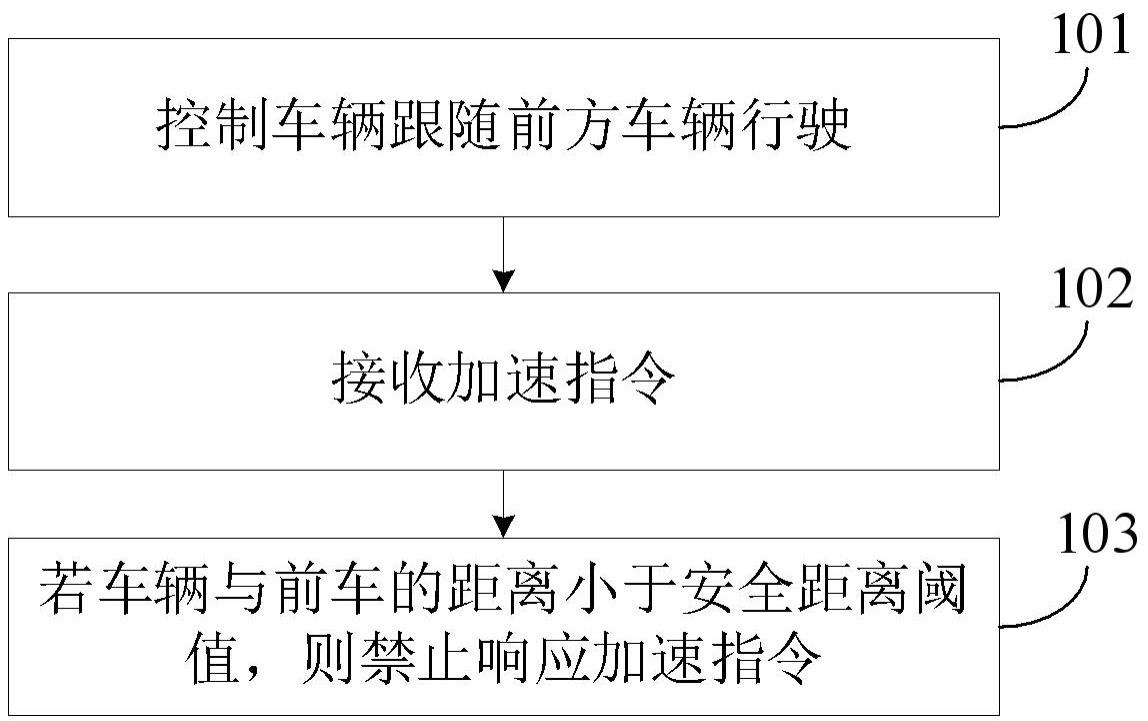
3、控制所述车辆跟随前方车辆行驶;
4、接收加速指令;
5、若所述车辆与所述前方车辆的距离小于安全距离阈值,则禁止响应所述加速指令。
6、一种可能的实现方式中,所述方法还包括:
7、若所述加速指令所指示的加速度小于加速度阈值,且所述车辆与所述前方车辆的距离大于等于所述安全距离阈值,则控制所述车辆按照所述加速度加速行驶。
8、一种可能的实现方式中,所述方法还包括:
9、若所述加速指令所指示的加速度大于等于加速度阈值,则停止跟随所述前方车辆行驶。
10、一种可能的实现方式中,所述若所述车辆与所述前方车辆的距离小于安全距离阈值,则禁止响应所述加速指令,包括:
11、若所述车辆的车速小于速度阈值,且所述车辆与所述前方车辆的距离小于安全距离阈值,则禁止响应所述加速指令。
12、一种可能的实现方式中,所述方法还包括:
13、若所述车辆与所述前方车辆的距离小于所述安全距离阈值,则控制所述车辆减速行驶,直至所述车辆与所述前方车辆的距离大于等于所述安全距离阈值。
14、一种可能的实现方式中,所述控制所述车辆减速行驶,包括:
15、控制所述车辆按照目标减速度减速行驶,所述目标减速度小于减速度阈值。
16、另一方面,提供了一种车辆,所述车辆包括:控制器;所述控制器用于:
17、控制所述车辆跟随前方车辆行驶;
18、接收加速指令;
19、若所述车辆与所述前方车辆的距离小于安全距离阈值,则禁止响应所述加速指令。
20、一种可能的实现方式中,所述控制器还用于:
21、若所述加速指令所指示的加速度小于加速度阈值,且所述车辆与所述前方车辆的距离大于等于所述安全距离阈值,则控制所述车辆按照所述加速度加速行驶。
22、一种可能的实现方式中,所述控制器还用于:
23、若所述加速指令所指示的加速度大于等于加速度阈值,则停止跟随所述前方车辆行驶。
24、又一方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上述方面所述的车辆的控制方法。
25、再一方面,提供了一种包含指令的计算机程序产品,当所述计算机程序产品在所述计算机上运行时,使得所述计算机执行上述方面所述的车辆的控制方法。
26、本发明提供的技术方案带来的有益效果至少包括:
27、本发明提供了一种车辆及其控制方法、计算机可读存储介质,车辆在跟随前车行驶的过程中可以接收加速指令。之后,若车辆确定其与前车的距离小于安全距离阈值,则可以禁止响应加速踏板的加速指令。即本发明提供的车辆在跟随前车行驶的过程中,能够通过安全距离阈值判断是否响应加速指令。如此,可以避免因车辆加速而导致车辆追尾前车,确保了车辆的安全行驶。
28、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种车辆的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:
4.根据权利要求1至3任一所述的方法,其特征在于,所述若所述车辆与所述前方车辆的距离小于安全距离阈值,则禁止响应所述加速指令,包括:
5.根据权利要求1至3任一所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述控制所述车辆减速行驶,包括:
7.一种车辆,其特征在于,所述车辆包括:控制器;所述控制器用于:
8.根据权利要求7所述的车辆,其特征在于,所述控制器还用于:
9.根据权利要求7所述的车辆,其特征在于,所述控制器还用于:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,计所述计算机程序被处理器执行时,实现如权利要求1至6任一所述的车辆的控制方法。
技术总结
本发明公开了一种车辆及其控制方法、计算机可读存储介质,涉及车辆技术领域。车辆在跟随前车行驶的过程中可以接收加速指令。之后,若车辆确定其与前车的距离小于安全距离阈值,则可以禁止响应加速踏板的加速指令。即本发明提供的车辆在跟随前车行驶的过程中,能够通过安全距离阈值判断是否响应加速指令。如此,可以避免因车辆加速而导致车辆追尾前车,确保了车辆的安全行驶。
技术研发人员:徐磊,陈奇,陈保成,冯源,邓永强
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!