一种控制系统和车辆的制作方法
本发明涉及车辆控制领域,尤其涉及一种控制系统和车辆。
背景技术:
1、随着智能网联技术的快速迭代,发展智能驾驶车辆包括自动驾驶车辆对促进产业转型升级具有重大意义。
2、目前,车辆大多采用传统的分布式电子电气架构,众多ecu(electronic controlunit,电子控制单元)分散布置在车辆的不同位置,而ecu之间往往通常通过can总线进行通讯。然而这种传统的can通讯方式,无法满足智能驾驶车辆对于数据传输的带宽及速率等要求,如无法满足l3级以上高级自动驾驶功能的相关信号的传输要求,从而无法保证对车辆的控制精度。
技术实现思路
1、本发明提供了一种控制系统和车辆,以解决对车辆的控制精度欠佳的问题。
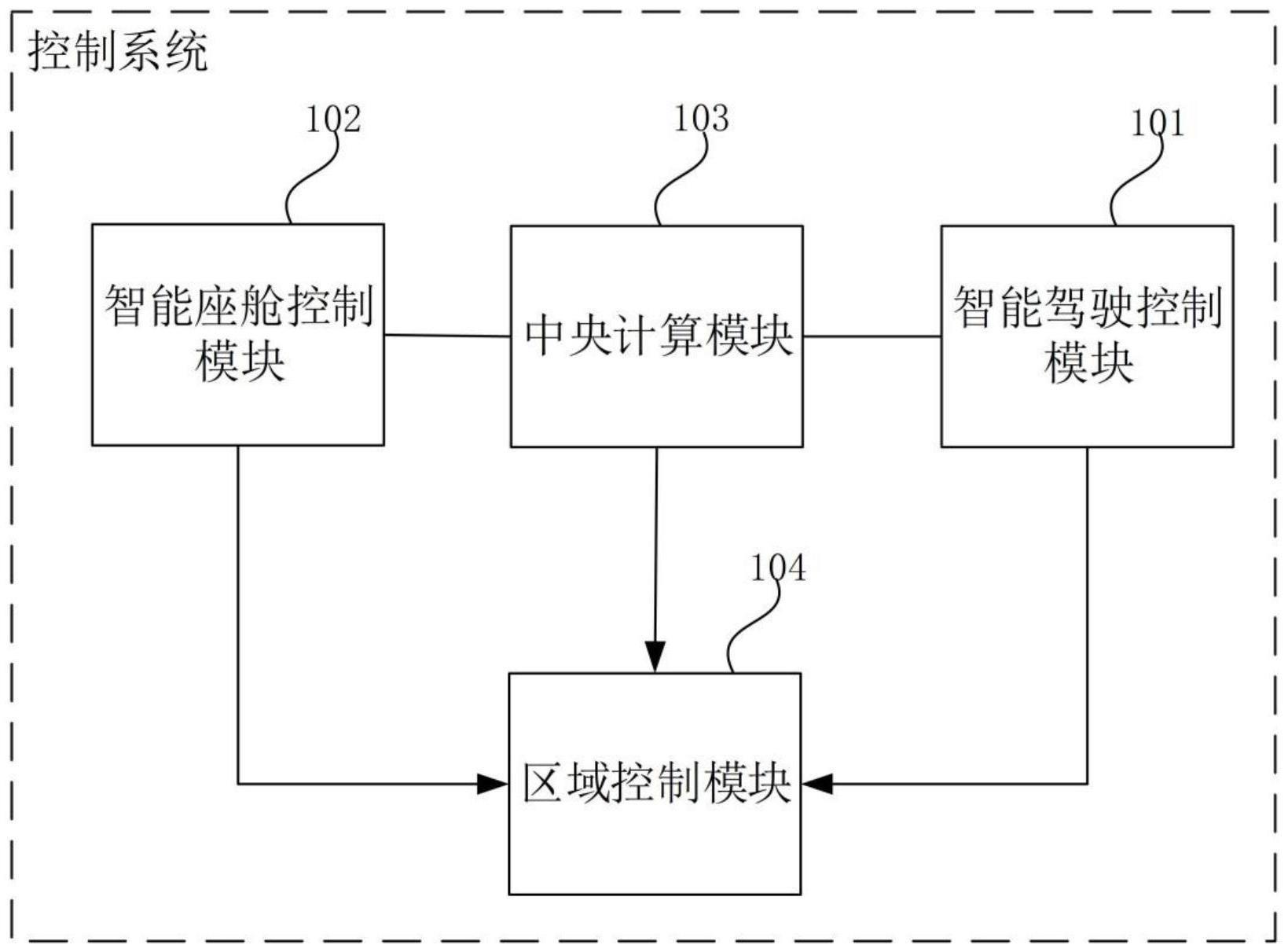
2、本发明提供了一种控制系统,该控制系统应用于车辆中,所述控制系统中包括智能驾驶控制模块、智能座舱控制模块、中央计算模块以及区域控制模块,所述区域控制模块包括多个区域控制单元,其中:
3、所述智能驾驶控制模块,用于根据采集到的预设智能驾驶传感器信息确定智能驾驶控制指令,并通过向第一区域控制单元发送所述智能驾驶控制指令,以实现l3级以上的自动驾驶功能;
4、所述智能座舱控制模块,用于根据预设智能座舱软件的运行信息,向第二区域控制单元发送智能座舱控制指令,以控制所述预设智能座舱软件;
5、所述中央计算模块,用于利用第一预设通讯方式分别与所述智能驾驶控制模块和所述智能座舱控制模块进行通讯,并利用第二预设通讯方式与第三区域控制单元进行通讯,其中,所述第一预设通讯方式对应的带宽大于所述第二预设通讯方式对应的带宽;
6、所述区域控制模块,用于根据控制指令和所述中央计算模块发送的车辆运行信息驱动执行器控制目标车辆,其中,所述控制指令包括所述智能驾驶控制指令和所述智能座舱控制指令。
7、进一步的,所述第一预设通讯方式和所述第二预设通讯方式中均包含至少两种不同的通讯方式,所述第一预设通讯方式中至少包含以太网通讯方式和can fd通讯方式,其中,所述can fd通讯方式用于通讯的冗余备份。
8、进一步的,所述区域控制单元在所述目标车辆中的物理位置、所述目标车辆中传感器的物理位置以及执行器的物理位置满足预设就近条件。
9、进一步的,所述预设就近条件包括:对于对应相同目标软件的目标区域控制单元、目标传感器和目标执行器,部署有所述目标软件的目标区域控制单元的物理位置与所述目标传感器的物理位置之间的距离小于第一预设阈值,所述目标区域控制单元的物理位置与所述目标执行器的物理位置之间的距离小于第二预设阈值,其中,所述目标软件用于实现目标功能,所述目标传感器包括向所述目标区域控制单元输出所述目标软件所需的传感数据的传感器,所述目标执行器包括从所述目标区域控制单元接收驱动信息的执行器。
10、进一步的,所述控制系统还包括车载t-box控制模块,其中:所述车载t-box控制模块,用于通过以太网通讯方式与所述中央计算模块、所述智能驾驶控制模块、所述智能座舱控制模块以及所述区域控制模块进行信息交互,并基于所述信息交互和与云端服务器的通讯,实现对所述控制系统的升级和更新,其中,所述与云端服务器的通讯基于第五代移动通讯技术实现。
11、进一步的,所述中央计算模块中包含多个不同类型的网络接口,以实现与车载t-box控制模块、所述智能驾驶控制模块、所述智能座舱控制模块以及所述区域控制模块的通讯。
12、进一步的,所述中央计算模块、所述智能驾驶控制模块以及所述智能座舱控制模块对应的芯片包括系统级芯片,所述区域控制单元对应的芯片包括微控制单元芯片。
13、进一步的,所述预设智能驾驶传感器至少包括摄像头和雷达传感器,所述预设智能座舱软件包括影音娱乐软件以及仪表盘显示软件。
14、本发明提供了一种车辆,该车辆包括上述第一方面的控制系统。
15、本发明提供的控制系统,包括智能驾驶控制模块、智能座舱控制模块、中央计算模块以及区域控制模块,所述区域控制模块包括多个区域控制单元,其中:所述智能驾驶控制模块,用于根据采集到的预设智能驾驶传感器信息确定智能驾驶控制指令,并通过向第一区域控制单元发送所述智能驾驶控制指令,以实现l3级以上的自动驾驶功能,所述智能座舱控制模块,用于根据预设智能座舱软件的运行信息,向第二区域控制单元发送智能座舱控制指令,以控制所述预设智能座舱软件,所述中央计算模块,用于利用第一预设通讯方式分别与所述智能驾驶控制模块和所述智能座舱控制模块进行通讯,并利用第二预设通讯方式与第三区域控制单元进行通讯,其中,所述第一预设通讯方式对应的带宽大于所述第二预设通讯方式对应的带宽,所述区域控制模块,用于根据控制指令和所述中央计算模块发送的车辆运行信息驱动执行器控制目标车辆,其中,所述控制指令包括所述智能驾驶控制指令和所述智能座舱控制指令。通过采用上述技术方案,中央计算模块通过较大带宽的通讯方式与,智能驾驶控制模块和智能座舱控制模块进行通讯,不仅满足了l3级以上高级自动驾驶功能的相关信号的传输要求,还提高了控制智能座舱软件的准确度和控制速度,从而提高了对整车的控制精度。
16、应当理解,本部分所描述的内容并非旨在标识本发明的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种控制系统,其特征在于,应用于车辆中,所述控制系统中包括智能驾驶控制模块、智能座舱控制模块、中央计算模块以及区域控制模块,所述区域控制模块包括多个区域控制单元,其中:
2.根据权利要求1所述的系统,其特征在于,所述第一预设通讯方式和所述第二预设通讯方式中均包含至少两种不同的通讯方式,所述第一预设通讯方式中至少包含以太网通讯方式和can fd通讯方式,其中,所述can fd通讯方式用于通讯的冗余备份。
3.根据权利要求2所述的系统,其特征在于,所述区域控制单元在所述目标车辆中的物理位置、所述目标车辆中传感器的物理位置以及执行器的物理位置满足预设就近条件。
4.根据权利要求3所述的系统,其特征在于,所述预设就近条件包括:
5.根据权利要求1-4中任一项所述的系统,其特征在于,所述控制系统还包括车载t-box控制模块,其中:
6.根据权利要求5所述的系统,其特征在于,所述中央计算模块中包含多个不同类型的网络接口,以实现与车载t-box控制模块、所述智能驾驶控制模块、所述智能座舱控制模块以及所述区域控制模块的通讯。
7.根据权利要求1所述的系统,其特征在于,所述中央计算模块、所述智能驾驶控制模块以及所述智能座舱控制模块对应的芯片包括系统级芯片,所述区域控制单元对应的芯片包括微控制单元芯片。
8.根据权利要求1所述的系统,其特征在于,所述预设智能驾驶传感器至少包括摄像头和雷达传感器,所述预设智能座舱软件包括影音娱乐软件以及仪表盘显示软件。
9.一种车辆,其特征在于,包括如所述权利要求1-8中任一项所述的控制系统。
技术总结
本发明公开了一种控制系统和车辆。该控制系统中的:智能驾驶控制模块,用于确定智能驾驶控制指令,并通过向第一区域控制单元发送智能驾驶控制指令;智能座舱控制模块,用于向第二区域控制单元发送智能座舱控制指令;中央计算模块,用于利用第一预设通讯方式分别与智能驾驶控制模块和智能座舱控制模块进行通讯,并利用第二预设通讯方式与第三区域控制单元进行通讯;区域控制模块,用于根据控制指令和中央计算模块发送的车辆运行信息驱动执行器控制目标车辆。本发明实施例的技术方案,中央计算模块通过较大带宽与智能驾驶控制模块和智能座舱控制模块进行通讯,实现了L3级以上高级自动驾驶功能,提高了对智能座舱软件的控制精度。
技术研发人员:高靖博,王宇,张建,刘秋铮,刘金波,袁文建,高乐
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!