制动转矩的控制方法、装置、电子设备及存储介质与流程
本发明涉及车辆制动,尤其涉及一种制动转矩的控制方法、装置、电子设备及存储介质。
背景技术:
1、制动防抱死是车辆制动的功能,也是行车安全的重要保证。目前制动防抱死问题包括:①在于车辆滑移率的计算精度低导致车轮状态误判引发制动防抱死算法触发导致系统异常工作;②在制动过程中驾驶员无法感知到制动车车轮处于抱死状态时,若驾驶在不停的动态操作制动踏板则导致车辆各轮不停的以实时踏板获得制动转矩扭矩为基础进行防抱死控制,导致车轮制动扭矩一直动态调制,算法控制稳定性能差,影响行车安全;③各轮由于其轮荷以及轮胎表面特性差异导致路面可提供各轮最大制动转矩不同,当有的车轮抱死时,有的车轮处于正常工作且制动扭矩还可继续正常增加,但是未利用正常工作轮对抱死轮损失的制动转矩进行补偿,整车的制动性能未能最大程度的发挥,导致整车制动距离变长的问题,降低整车的安全性。④在制动转矩控制过程中未考虑各轮的机械液压能力导致系统超能工作而损坏的问题。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明的目的在于提供一种制动转矩的控制方法、装置、电子设备及存储介质。
2、为达此目的,本发明采用以下技术方案:
3、第一方面,一种制动转矩的控制方法,包括以下步骤:
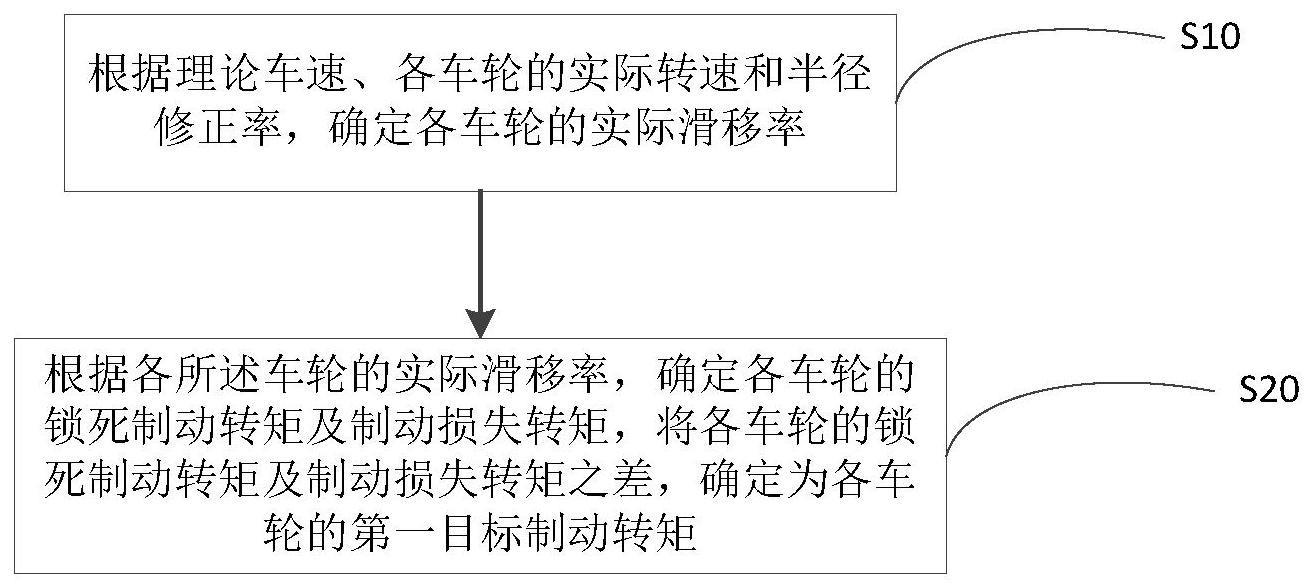
4、根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率;
5、根据各所述车轮的实际滑移率,确定各所述车轮的锁死制动转矩及制动损失转矩,将各所述车轮的锁死制动转矩及制动损失转矩之差,确定为各所述车轮的第一目标制动转矩。
6、在一个实施例中,所述根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率的步骤包括:
7、通过定位设备确定原始车速;
8、根据方向盘角度和所述各车轮的导航角,确定所述各车轮的转弯半径;
9、确定所述原始车速和所述各车轮的转弯半径,确定所述各车轮的理论车速。
10、在一个实施例中,所述根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率的步骤还包括:
11、根据车轮的当前胎压、最大胎压值、最小胎压时标定的最小修正系数,确定当前车压下的半径修正率。
12、在一个实施例中,所述确定各所述车轮的锁死制动转矩的步骤包括:
13、基于制动踏板开度,确定各车轮的基础制动转矩,其中,左侧两车轮的基础制动转矩之和等于右侧两车轮的基础制动转矩之和;
14、所述实际滑转率上升至滑转率第一阀值时,确定该时刻的基础制动转矩作为锁死制动转矩并保持,直到所述实际滑转率下降至设定的滑转率第二阀值后,实时确定基础制动转矩作为锁死制动转矩,其中,所述滑转率第一阀值大于所述滑转率第二阀值。
15、在一个实施例中,所述确定各车轮的制动损失转矩的步骤包括:
16、当实际滑转率大于设定的锁死滑转率阀值时,则锁死制动转矩等于滑转率大于设定的锁死滑转率阀值状态的第一时刻的基础制动转矩;并且,直到实际滑转率小于设定的锁死滑转率阀值之前保持不变。
17、在一个实施例中,所述确定为各所述车轮的第一目标制动转矩步骤之后还包括:
18、根据车轮抱死滑移率阈值和车轮正常选择滑移率阈值,确定同侧两个车轮中的任一车轮对另一车轮的损失制动转矩的补偿值;
19、根据所述第一目标制动转矩、基础制动转矩和损失制动转矩的补偿值,确定各车轮的第二目标制动转矩;
20、根据各车轮的所述第二目标制动转矩和各车轮的允许使用最大制动转矩,确定第三目标制动转矩。
21、在一个实施例中,根据左右两侧制动转矩总和的最小值和所述第三目标制动转矩,确定第四目标制动转矩。
22、第二方面,一种制动转矩的控制装置,包括:
23、第一模块,用于根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率;
24、第二模块,用于根据各所述车轮的实际滑移率,确定各所述车轮的锁死制动转矩及制动损失转矩,将各所述车轮的锁死制动转矩及制动损失转矩之差,确定为各所述车轮的第一目标制动转矩。
25、第三方面,一种电子设备,包括:
26、至少一个处理器、至少一个存储器和通信接口;其中,
27、所述处理器、存储器和通信接口相互间进行通信;
28、所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令,以执行上述的制动转矩的控制方法。
29、第四方面,一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行上述的制动转矩的控制方法。
30、本发明的有益效果:
31、对于制动转矩的控制方法、装置、电子设备及存储介质,通过根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率;根据各所述车轮的实际滑移率,确定各所述车轮的锁死制动转矩及制动损失转矩,将各所述车轮的锁死制动转矩及制动损失转矩之差,确定为各所述车轮的第一目标制动转矩,解决了车辆失稳的问题,提高了车辆制动过程中安全性,提高滑移率的计算精度,同时防止车辆防抱死功能错误触发。
32、本申请附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种制动转矩的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的制动转矩的控制方法,其特征在于,所述根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率的步骤包括:
3.根据权利要求2所述的制动转矩的控制方法,其特征在于,所述根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率的步骤还包括:
4.根据权利要求1所述的制动转矩的控制方法,其特征在于,所述确定各所述车轮的锁死制动转矩的步骤包括:
5.根据权利要求4所述的制动转矩的控制方法,其特征在于,所述确定各车轮的制动损失转矩的步骤包括:
6.根据权利要求5所述的制动转矩的控制方法,其特征在于,所述确定为各所述车轮的第一目标制动转矩步骤之后还包括:
7.根据权利要求6所述的制动转矩的控制方法,其特征在于,根据左右两侧制动转矩总和的最小值和所述第三目标制动转矩,确定第四目标制动转矩。
8.一种制动转矩的控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行权利要求1至7任一项所述的制动转矩的控制方法。
技术总结
本发明公开了一种制动转矩的控制方法、装置、电子设备及存储介质,其中方法包括以下步骤:根据理论车速、各车轮的实际转速和半径修正率,确定各所述车轮的实际滑移率;根据各所述车轮的实际滑移率,确定各所述车轮的锁死制动转矩及制动损失转矩,将各所述车轮的锁死制动转矩及制动损失转矩之差,确定为各所述车轮的第一目标制动转矩。有益效果:解决了车辆失稳的问题,提高了车辆制动过程中安全性,提高滑移率的计算精度,同时防止车辆防抱死功能错误触发。
技术研发人员:熊勇,张伟超,王龙,陆龙飞,孙云峰
受保护的技术使用者:东风越野车有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!