车辆传感器控制方法、车辆及计算机存储介质与流程
本发明涉及汽车,尤其涉及一种车辆传感器控制方法、车辆及计算机存储介质。
背景技术:
1、随着自动驾驶技术的发展,车载传感器的功能也越来越强大,常见的传感器包括激光雷达及摄像头等,各种传感器的信息融合可以使得自动驾驶车辆能够更加准确地感知周围环境,以保证自动驾驶的安全性。
2、现有技术中,参考图1,当车辆处于上坡或下坡路段时,由于激光雷达及摄像头的视野固定,坡道角度较大时,车辆无法感知到更远距离障碍物或路面的状态,容易发生交通事故。
技术实现思路
1、本发明实施例提供了一种车辆传感器控制方法、车辆及计算机存储介质,以解决现有技术中车载传感器的视野固定,上下坡时容易发生交通事故的问题。
2、第一方面,本发明实施例提供了一种车辆传感器控制方法,包括:
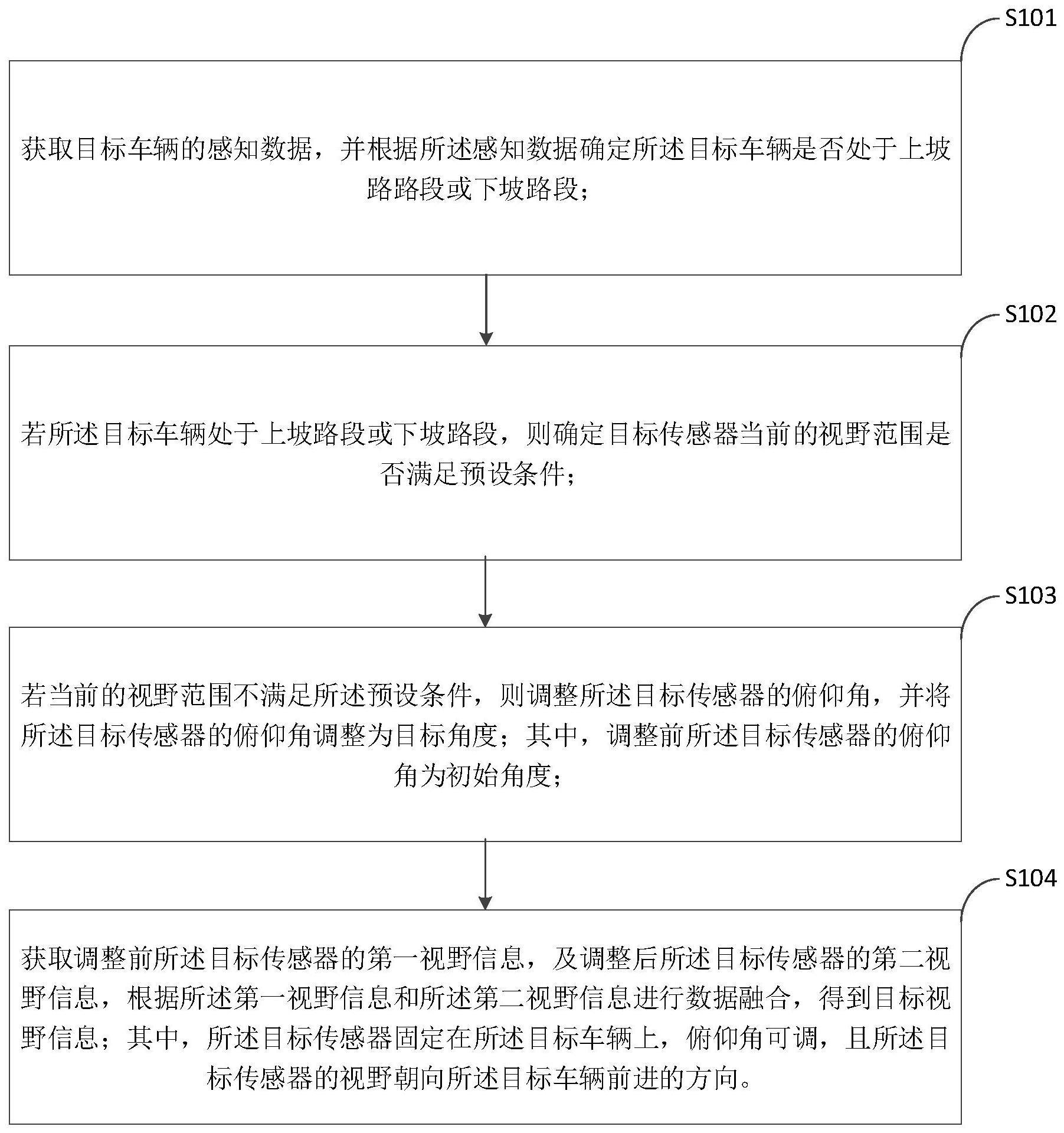
3、获取目标车辆的感知数据,并根据感知数据确定目标车辆是否处于上坡路路段或下坡路段;
4、若目标车辆处于上坡路段或下坡路段,则确定目标传感器当前的视野范围是否满足预设条件;
5、若当前的视野范围不满足预设条件,则调整目标传感器的俯仰角,并将目标传感器的俯仰角调整为目标角度;其中,调整前目标传感器的俯仰角为初始角度;
6、获取调整前目标传感器的第一视野信息,及调整后目标传感器的第二视野信息,根据第一视野信息和第二视野信息进行数据融合,得到目标视野信息;
7、其中,目标传感器固定在目标车辆上,俯仰角可调,且目标传感器的视野朝向目标车辆前进的方向。
8、第二方面,本发明实施例提供了一种车辆,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式的车辆传感器控制方法的步骤。
9、第三方面,本发明实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式的车辆传感器控制方法的步骤。
10、本发明实施例提供一种车辆传感器控制方法、车辆及计算机存储介质。上述方法包括:获取目标车辆的感知数据,并根据感知数据确定目标车辆是否处于上坡路路段或下坡路段;若目标车辆处于上坡路段或下坡路段,则确定目标传感器当前的视野范围是否满足预设条件;若当前的视野范围不满足预设条件,则调整目标传感器的俯仰角,并将目标传感器的俯仰角调整为目标角度;其中,调整前目标传感器的俯仰角为初始角度;获取调整前目标传感器的第一视野信息,及调整后目标传感器的第二视野信息,根据第一视野信息和第二视野信息进行数据融合,得到目标视野信息;其中,目标传感器固定在目标车辆上,俯仰角可调,且目标传感器的视野朝向目标车辆前进的方向。本发明实施例中当目标车辆在上下坡路段视野范围固定、视野受限时,动态调整目标传感器的俯仰角,并将不同俯仰角的视野信息融合,扩大了目标传感器的视野范围,保证在安全距离范围内不存在视野盲区,有效提高了驾驶安全性。
技术特征:
1.一种车辆传感器控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆传感器控制方法,其特征在于,所述确定目标传感器当前的视野范围是否满足预设条件,包括:
3.根据权利要求2所述的车辆传感器控制方法,其特征在于,所述确定在当前视野下所述目标车辆的可行驶时间,包括:
4.根据权利要求1所述的车辆传感器控制方法,其特征在于,所述若当前的视野范围不满足所述预设条件,则调整所述目标传感器的俯仰角,并将所述目标传感器的俯仰角调整为目标角度,包括:
5.根据权利要求4所述的车辆传感器控制方法,其特征在于,所述获取调整前所述目标传感器的第一视野信息,及调整后所述目标传感器的第二视野信息,根据所述第一视野信息和所述第二视野信息进行数据融合,得到目标视野信息,包括:
6.根据权利要求1至5任一项所述的车辆传感器控制方法,其特征在于,在所述获取调整前所述目标传感器的第一视野信息,及调整后所述目标传感器的第二视野信息,并将所述第一视野信息和所述第二视野信息融合,得到目标视野信息之后,所述方法还包括:
7.根据权利要求1至5任一项所述的车辆传感器控制方法,其特征在于,在所述若当前的视野范围不满足所述预设条件,则调整所述目标传感器的俯仰角,并将所述目标传感器的俯仰角调整为目标角度之后,所述方法还包括:
8.根据权利要求1至5任一项所述的车辆传感器控制方法,其特征在于,所述方法还包括:
9.一种车辆,其特征在于,包括处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序,执行如权利要求1至8中任一项所述的车辆传感器控制方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至8中任一项所述的车辆传感器控制方法的步骤。
技术总结
本发明提供一种车辆传感器控制方法、车辆及计算机存储介质。上述方法包括:若目标车辆处于上坡路段或下坡路段,则确定目标传感器当前的视野范围是否满足预设条件;若当前的视野范围不满足预设条件,则调整目标传感器的俯仰角,并将目标传感器的俯仰角调整为目标角度;其中,调整前目标传感器的俯仰角为初始角度;获取调整前目标传感器的第一视野信息,及调整后目标传感器的第二视野信息,根据第一视野信息和第二视野信息进行数据融合,得到目标视野信息;本发明在上下坡视野范围固定时,动态调整目标传感器的俯仰角,并将不同俯仰角下的视野信息融合,扩大了视野范围,有效提高了驾驶安全性。
技术研发人员:任晓辉
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!