一种分布式驱动车辆动力系统能耗优化方法
本发明涉及新能源汽车的四轮驱动转矩分配,更具体的是,本发明涉及一种分布式驱动车辆动力系统能耗优化方法。
背景技术:
1、目前随着全球能源储存量减少和环境污染愈加严重,新能源汽车逐渐成为我国汽车行业研究重要方向,并随着技术愈加成熟,新能源汽车的数量保持稳定的快速增长,其中分布式驱动车辆也称轮毂电机驱动车辆,因其四轮分布式驱动的结构,使其底盘结构相比传统的集中式电机驱动车辆的底盘结构更加精简。轮毂电机、车轮和制动装置等集成为自动轮,使得车辆的结构更加紧凑,很大程度上节省了车身空间,从而整车的布置也变得更加灵活,其线性控制的能力使得底盘更加轻盈,传动效率更加高效,动力输出更加高效稳定。由于其独特的分布式驱动,在车辆行驶时,可以根据纵向需求力和期望附加横摆力矩,通过电机效率和轮胎利用率进行合理地分配轮毂电机转矩,使其车辆在行驶时,四个轮毂电机的功率之和最小,轮胎利用率最高,其电池的使用能耗降到最低的同时,满足车辆的操纵稳定性,提高了车辆的能量利用率和行驶安全性。
2、目前,在分布式车辆的能耗优化研究中,多倾向于考虑了纵向行驶的工况而对转向工况时的转矩分配缺乏研究,转矩分配多数基于前后轴系数分配而不是四个车轮之间的分配,在同时具有纵向需求力和期望附加横摆力矩时,该如何运用目标函数的权重系数而进行转矩分配是目前较重要的研究方向。
3、因此,亟需一种在考虑纵向需求力和附加横摆力矩的基础上,能够根据电机效率和轮胎利用率以及要满足车辆的需求动力的原则下,合理地在车辆行驶时进行四个需求目标的侧重,进行分布式驱动车辆轮毂电机转矩分配的能耗优化控制方法。
技术实现思路
1、本发明的目的是设计开发了一种分布式驱动车辆动力系统能耗优化方法,通过轮毂电机损失功率之和最小和轮胎利用率之和最大,在满足动力性的同时,进行四个轮毂电机的转矩分配,保证操纵稳定性的同时,提高能量利用率,降低轮毂电机的工作能耗。
2、本发明提供的技术方案为:
3、一种分布式驱动车辆动力系统能耗优化方法,包括如下步骤:
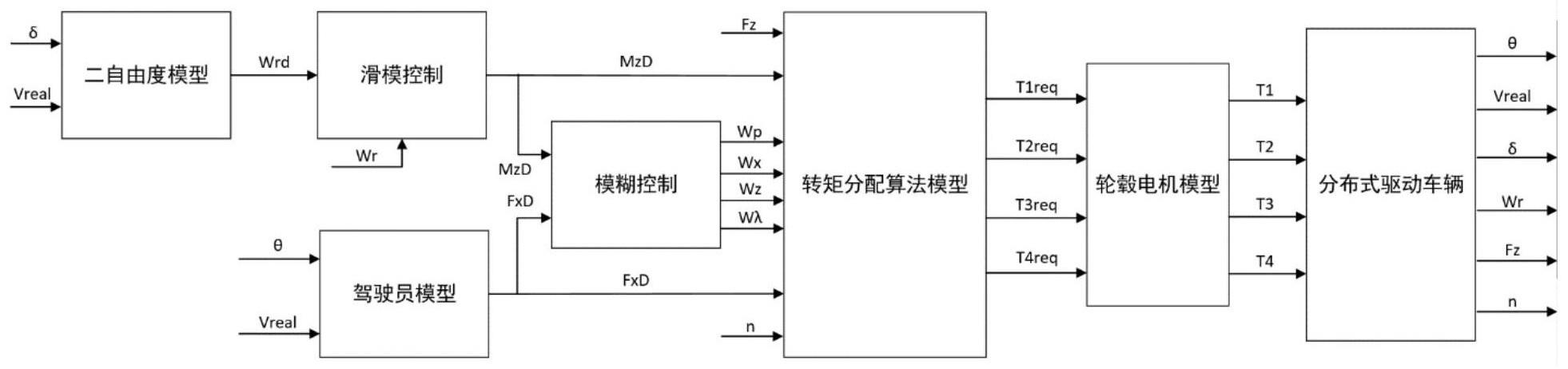
4、步骤一、根据车速和车轮转角获得车辆的期望横摆角速度,根据油门踏板开度和最大车速获得车辆的期望车速;
5、步骤二、根据所述车辆的期望横摆角速度获得期望附加横摆力矩,根据所述车辆的期望车速获得车辆纵向需求力;
6、步骤三、根据所述期望附加横摆力矩和车辆纵向需求力通过模糊控制获得电机损耗目标函数的权重系数、轮胎利用率的权重系数、纵向需求力权重系数和期望附加横摆力矩权重系数;
7、步骤四、建立效率-附着-动力优化函数;
8、minj=wpjp+wλjλ+wxjx+wzjz;
9、
10、式中,j为总目标函数,wp为电机损耗目标函数的权重系数,wλ为轮胎利用率的权重系数,wx为纵向需求力权重系数,wz为期望附加横摆力矩权重系数,jp为轮毂电机损耗目标函数,jλ为轮胎利用率目标函数,jx为满足纵向需求力目标函数,jz为满足附加横摆力矩目标函数,ti为第i个轮毂电机的转矩,timax为第i个轮毂电机的最大转矩,fxi为第i个车轮的纵向力,μi为第i个车轮的轮胎附着率,fzi为第i个车轮的轮胎附着力,且i=1,2,3,4,当i=1时,车轮为左前车轮,当i=2时,车轮为右前轮胎,当i=3时,车轮为左后轮胎,当i=4时,车轮为右后轮胎;
11、步骤五、根据四个车轮的纵向期望力获得能耗优化后的四个轮毂电机的期望转矩。
12、优选的是,所述期望横摆角速度满足:
13、
14、式中,ωrd为车辆的期望横摆角速度,k1为车辆前轴的刚度,k2为车辆后轴的刚度,β为车辆质心侧偏角,u为纵向车速,a为车辆质心到前轴的距离,b为车辆质心到后轴的距离,δ为标准车轮转角,iz为车辆的转动惯量;
15、所述车辆的期望车速满足:
16、vreq=θ·vmax;
17、式中,vreq为车辆的期望车速,θ为油门踏板开度,vmax为最大车速。
18、优选的是,所述车辆纵向需求力满足:
19、
20、式中,f(t)为车辆的纵向需求力,e1(t)为t时刻的车速误差,kp为比例系数,ki为积分系数,kd为微分系数。
21、优选的是,所述期望附加横摆力矩满足:
22、
23、式中,mzd为期望附加横摆力矩,为期望横摆角速度导数,ε为边界层厚度,τ为趋近率指数,sat(s)为饱和函数,s为滑膜积分函数,λ为滑膜参数,e2为横摆角速度误差,ωr为车辆实际横摆角速度。
24、优选的是,所述滑膜积分函数为:
25、
26、所述饱和函数为:
27、
28、式中,α为边界层厚度倒数,δ为边界层厚度。
29、优选的是,所述步骤三中的模糊控制具体包括:
30、模糊控制模型的输入为期望附加横摆力矩和纵向需求力的绝对值;
31、模糊控制的输出为电机损耗目标函数的权重系数、轮胎利用率目标函数的权重系数、纵向需求力目标函数的权重系数和期望附加横摆力矩目标函数的权重系数;
32、所述期望附加横摆力矩的变化范围为:
33、所述纵向需求力的绝对值的变化范围为:
34、所述电机损耗目标函数的权重系数的变化范围为[0,1];
35、所述轮胎利用率目标函数的权重系数的变化范围为:[0,10];
36、所述纵向需求力目标函数的权重系数的变化范围为:[0,100]
37、所述期望附加横摆力矩目标函数的权重系数的变化范围为:[0,100];
38、其中,timax为第i个轮毂电机所能提供的最大转矩,r为轮胎的滚动半径,mimax为第i个轮毂电机所能提供的最大横摆力矩。
39、优选的是,所述效率-附着-动力优化函数需轮毂电机损耗目标函数最小和轮胎利用率目标函数最小,并且需满足车辆动力性;
40、所述轮毂电机损耗目标函数最小为:
41、
42、式中,jp为轮毂电机损耗目标函数,ploss-i为第i个轮毂电机的损失功率;
43、所述第i个电机的损失功率满足:
44、
45、式中,pmotor-i为第i个轮毂电机的输出功率,ηi为第i个轮毂电机的效率,ti为第i个轮毂电机的转矩,ni为第i个车轮的转速;
46、所述第i个轮毂电机的转矩满足:
47、ti=fxir;
48、式中,fxi为第i个车轮的纵向力。
49、优选的是,所述轮胎利用率目标函数最小为:
50、
51、式中,jλ为轮胎利用率目标函数,ηzi为轮胎利用率;
52、轮胎利用率满足:
53、
54、式中,fxi为第i个车轮的纵向力,fzi为第i个车轮的轮胎附着力,μi为第i个车轮的轮胎附着率。
55、优选的是,所述满足车辆动力性的目标函数为:
56、
57、
58、式中,fxd为纵向需求力,mi为第i个车轮产生的横摆力矩,mzd为期望附加横摆力矩。
59、优选的是,所述步骤四中以二次规划优化算法对效率-附着-动力优化函数求解;
60、所述二次规划优化算法为:
61、
62、式中,h为正定矩阵,a·x≤b为不等式约束,a为对应维数的不等式约束矩阵,b为不等式约束条件的列向量,aeq·x=beq为等式约束,aeq为对应维数的等式约束矩阵,beq为等式约束条件的列向量,ub为求解值上界,lb为求解值下界;
63、x=[fxl1 fxr1 fxl2 fxr2]t;
64、h=wphp+wλhλ+wxhx+wzhz;
65、
66、
67、当纵向总期望力或期望附加横摆力矩大于四个轮毂电机所能提供的最大值时:
68、
69、当纵向总期望力和期望附加横摆力矩均不超过四个轮毂电机所能提供的最大值时:
70、
71、式中,d为车轮轮距。
72、本发明所述的有益效果:
73、本发明设计开发的一种分布式驱动车辆动力系统能耗优化方法,通过轮毂电机损失功率之和最小和轮胎利用率之和最小,在满足动力性的同时,进行四个轮毂电机的转矩分配,提高了电动汽车的能量利用率,使其轮毂电机的工作能耗大幅度降低,并且充分利用了轮胎的最大附着力,保证了车辆的操纵稳定性的同时,极大的提高了电动汽车的续航里程。
- 还没有人留言评论。精彩留言会获得点赞!