无人驾驶矿车的制动控制方法、装置、芯片、设备及介质与流程
本公开涉及自动控制,尤其涉及一种无人驾驶矿车的制动控制方法、装置、芯片、设备及介质。
背景技术:
1、目前在矿上投入使用的大型电动轮矿卡等矿车进行矿物资运输等,由于矿车通常在露天矿山中进行工作,矿山环境恶劣,尤其是在雨雪天或是洒了水的下坡路段或平路路段下,避免矿车的侧滑是备受关注的问题。
2、相关技术中,在小型轿车等常用车中,通过常用车的转向角得出的目标横摆率和安装在常用车的传感器检出的实际横摆率,以及车体侧偏角等判断是否发生侧滑。但是,由于车体侧偏角无法用普通的传感器直接检出,因此需要通过转向角传感器,横摆传感器,前后及横向加速度传感器以及车轮轮速传感器等进行推测,再根据常用车侧滑的状态,控制器直接对各个轮胎的制动力矩进行再分配,从而达到抑制侧滑、保持车辆稳定的目的。
3、然而,目前在矿上投入使用的矿车中,大部分均未配备完备的传感器硬件设备等,这些矿车在经过无人驾驶改造后,由于底层线控缺少防滑稳定控制功能,就不得不要求无人驾驶控制器需要具备一定的侧滑检测和防滑控制能力,加之这些矿车在制动时,无法直接对各个轮胎的制动力矩进行分配,所以上述提到的常用车的防滑稳定控制技术也无法完全借鉴,因此,无法有效避免矿车的侧滑,从而导致了驾驶安全隐患。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开提供了一种无人驾驶矿车的制动控制方法、装置、芯片、设备及介质。
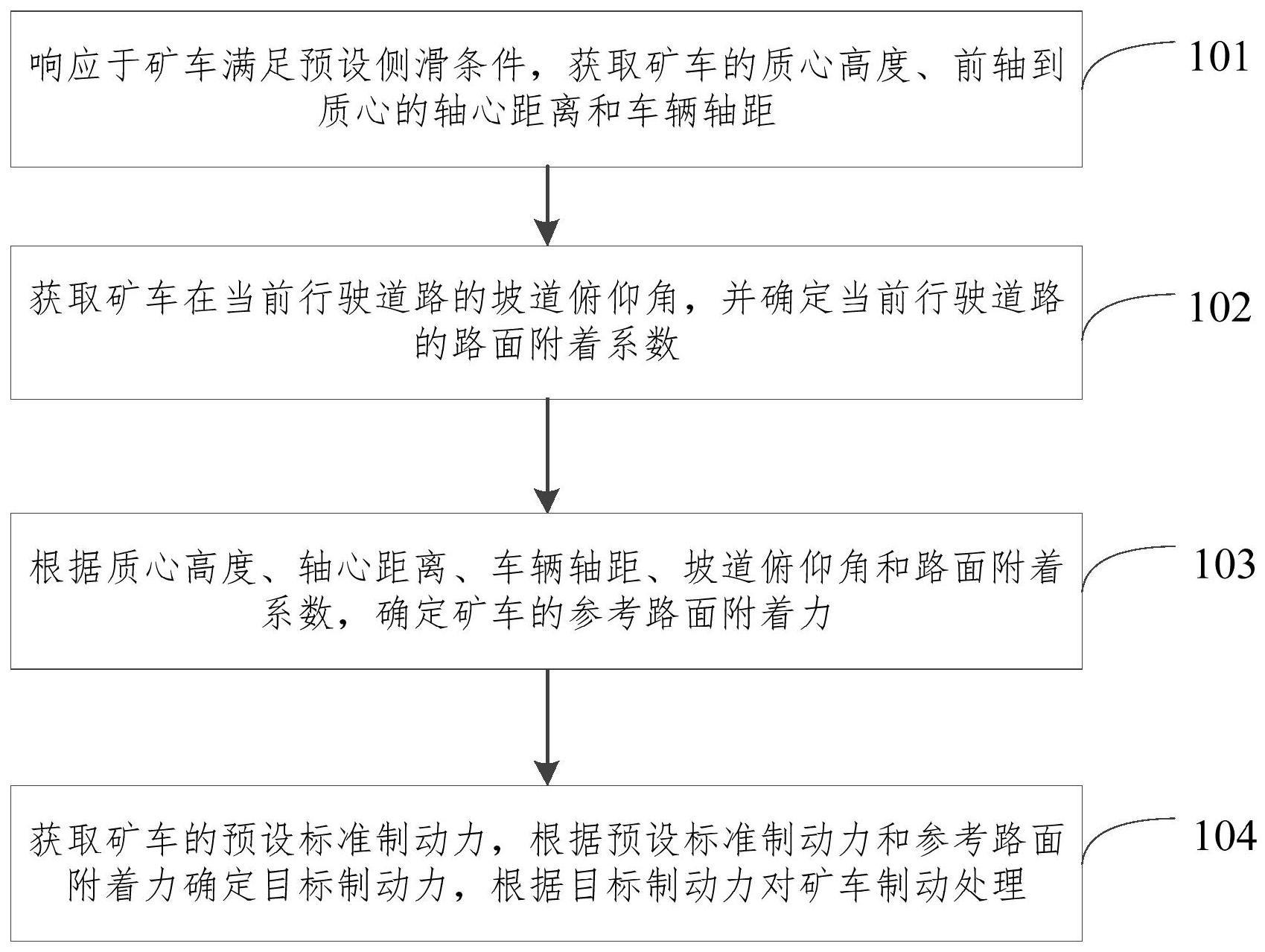
2、本公开实施例提供了一种无人驾驶矿车的制动控制方法,所述方法包括:响应于矿车满足预设侧滑条件,获取所述矿车的质心高度、前轴到所述质心的轴心距离和车辆轴距;获取所述矿车在当前行驶道路的坡道俯仰角,并确定所述当前行驶道路的路面附着系数;根据所述质心高度、所述轴心距离、所述车辆轴距、所述坡道俯仰角和所述路面附着系数,确定所述矿车的参考路面附着力;获取所述矿车的预设标准制动力,根据所述预设标准制动力和所述参考路面附着力确定目标制动力,根据所述目标制动力对所述矿车制动处理。
3、在本公开一个可选的实施例中,在所述响应于矿车满足预设侧滑条件之前,还包括:获取所述矿车中预设组合式惯性导航系统检测的航向角度和第一航向角速度;根据所述航向角度和所述第一航向角速度计算获取实际航向角速度,并获取所述矿车的期望航向角速度;根据所述实际航向角速度和所述期望航向角速度确定所述矿车满足所述预设侧滑条件。
4、在本公开一个可选的实施例中,所述根据所述航向角度和所述第一航向角速度计算获取实际航向角速度,包括:对所述航向角度求导计算以获取第二航向角速度;根据预设滤波算法对所述第一航向角速度和所述第二航向角速度进行滤波计算,以获取所述实际航向角速度。
5、在本公开一个可选的实施例中,所述获取所述矿车的期望航向角速度,包括:获取所述预设组合式惯性导航系统检测的车速信息,并获取所述矿车中前轮上的转角传感器输出的前轮转角信息;根据所述车速信息和所述前轮转角信息获取所述期望航向角速度。
6、在本公开一个可选的实施例中,所述根据所述车速信息和所述前轮转角信息获取所述期望航向角速度,包括:计算所述前轮转角信息对应的正切函数值,并计算所述车速信息和所述正切函数值的第一乘积值;计算所述第一乘积值和所述车辆轴距的第一比值,确定所述第一比值为所述期望航向角速度。
7、在本公开一个可选的实施例中,所述根据所述实际航向角速度和所述期望航向角速度确定所述矿车满足所述预设侧滑条件,包括:计算所述实际航向角速度的绝对值与所述期望航向角速度的绝对值之间的角速度差值;在所述角速度差值大于预设角速度误差阈值的情况下,确定所述矿车满足所述预设侧滑条件。
8、在本公开一个可选的实施例中,在所述确定所述矿车满足所述预设侧滑条件之前,还包括:获取所述矿车中预设组合式惯性导航系统检测的所述矿车的侧向速度信息;确定所述侧向速度信息的绝对值大于预设侧向速度阈值。
9、在本公开一个可选的实施例中,在所述确定所述矿车满足所述预设侧滑条件之前,还包括:确定所述角速度差值大于预设角速度误差阈值的第一持续时长;确定所述侧向速度信息的绝对值大于预设侧向速度阈值的第二持续时长;确定所述第一持续时长和所述第二持续时长均大于预设持续时长阈值。
10、在本公开一个可选的实施例中,所述获取所述矿车在当前行驶道路的坡道俯仰角,包括:根据预设采集周期获取当前采集周期对应的当前矿车位置信息,并获取所述矿车在上一个采集周期的参考矿车位置信息;根据所述当前矿车位置信息和所述参考矿车位置信息确定第一参考坡道俯仰角;获取所述矿车中预设组合式惯性导航系统检测的第二参考坡道俯仰角;根据预设滤波算法对所述第一参考坡道俯仰角和所述第二参考坡道俯仰角进行滤波计算,以获取所述坡道俯仰角。
11、在本公开一个可选的实施例中,所述根据所述当前矿车位置信息和所述参考矿车位置信息确定第一参考坡道俯仰角,包括:计算所述当前矿车位置信息和所述参考矿车位置信息,分别在水平方向、竖直方向和垂直方向上的第一移动距离、第二移动距离和第三移动距离;对第一移动距离的平方值和所述第二移动距离的平方值求和计算以获取平方值之和,并确定所述平方根之和的算数平方根;计算所述第三距离和所述算数平方根的第二比值,确定所述第二比值的反正切函数值为所述第一参考坡道俯仰角。
12、在本公开一个可选的实施例中,所述确定所述当前行驶道路的路面附着系数,包括:获取所述当前行驶道路对应的天气信息;在所述天气信息属于预设第一天气类型的情况下,确定所述路面附着系数为第一预设系数;在所述天气信息属于预设第二天气类型的情况下,确定所述路面附着系数为第二预设系数。
13、在本公开一个可选的实施例中,所述根据所述质心高度、所述轴心距离、所述车辆轴距、所述坡道俯仰角和所述路面附着系数,确定所述矿车的参考路面附着力,包括:计算所述坡道俯仰角的余弦函数值和所述轴心距离的第二乘积值;计算所述坡道俯仰角的正弦函数值和所述质心高度的第三乘积值;计算所述第二乘积值和所述第三乘积值的乘积差值,并计算所述乘积差值和所述车辆轴距的第三比值;计算所述矿车的矿车重量、重力加速度和所述路面附着系数的第四乘积值;对所述第三比值和所述第四乘积值进行乘积计算以获取所述参考路面附着力。
14、在本公开一个可选的实施例中,所述根据所述预设标准制动力和所述参考路面附着力确定目标制动力,包括:确定所述预设标准制动力和所述参考路面附着力中的最小值,确定所述最小值为所述目标制动力。
15、本公开实施例还提供了一种无人驾驶矿车的制动控制装置,所述装置包括:第一获取模块,用于响应于矿车满足预设侧滑条件,获取所述矿车的质心高度、前轴到所述质心的轴心距离和车辆轴距;第二获取模块,用于获取所述矿车在当前行驶道路的坡道俯仰角;第一确定模块,用于确定所述当前行驶道路的路面附着系数;第二确定模块,用于根据所述质心高度、所述轴心距离、所述车辆轴距、所述坡道俯仰角和所述路面附着系数,确定所述矿车的参考路面附着力;第三获取模块,用于获取所述矿车的预设标准制动力;制动处理模块,用于根据所述预设标准制动力和所述参考路面附着力确定目标制动力,根据所述目标制动力对所述矿车制动处理。
16、本公开实施例还提供了一种芯片,所述芯片包括至少一个处理器和通信接口,所述通信接口和所述至少一个处理器耦合,所述至少一个处理器用于运行计算机程序或指令,以实现如本公开实施例提供的无人驾驶矿车的制动控制方法。
17、本公开实施例还提供了一种终端,所述终端包括如本公开实施例提供的无人驾驶矿车的制动控制装置。
18、本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如本公开实施例提供的无人驾驶矿车的制动控制方法。
19、本公开实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序;所述处理器执行所述计算机程序时,实现如本公开实施例提供的无人驾驶矿车的制动控制方法。
20、本公开实施例提供的技术方案与现有技术相比具有如下优点:
21、本公开实施例提供的无人驾驶矿车的制动控制方案,响应于矿车满足预设侧滑条件,获取矿车质心高度、前轴到质心的轴心距离和车辆轴距,进而,获取矿车在当前行驶道路的坡道俯仰角,并确定当前行驶道路的路面附着系数,根据质心高度、轴心距离、车辆轴距、坡道俯仰角和路面附着系数,确定矿车的参考路面附着力,获取矿车的预设标准制动力,根据预设标准制动力和参考路面附着力确定目标制动力,根据目标制动力对矿车制动处理。在本公开的实施例中,基于动力学分析角度确定矿车的路面附着力,参考路面附着力在矿车可能发生侧滑时对输出制动力进行限制,有效避免了矿车的侧滑,保证了驾驶安全。
- 还没有人留言评论。精彩留言会获得点赞!