自动驾驶车辆高速公路变道轨迹预测的方法及相关设备与流程
本发明涉及自动驾驶,尤其涉及一种自动驾驶车辆高速公路变道轨迹预测的方法及相关设备。
背景技术:
1、自动驾驶车辆和人工驾驶车交互渗透组成的有人/无人驾驶混合驾驶复杂环境下,行驶车辆具有独立性、制约性和传递性。在未来很长一段时间内,将会存在传统人工驾驶车辆和自动驾驶车辆并存的混合交通环境。自动驾驶车辆行为研究需充分考虑信息实时可靠和驾驶辅助可控等要求更高的城市环境与交通场景。
2、现有的自动驾驶车辆换道关键理论与方法存在车辆匀质、时间、空间和任务约束理想化等问题,使得车辆行驶安全和运输效率难以实现最优化求解。
3、此外,目前高速公路自动驾驶变道轨迹预测方法主要使用基于固定运动学模型的方法,即通过对观测周期内的连续多个采样周期的目标车辆运动状态进行离散观测,例如中国专利cn202211593201即基于该种方法。但是,该种方法存在以下技术缺陷:
4、1、无法对目标车辆进行随机状态建模,即车辆运动观测完全凭借动力学模型观测。
5、2、使用第一轨迹表征序列输入至车辆轨迹预测模型,对第二轨迹表征序列中的每个轨迹点数据进行优化,无反馈修正环节接入,如果第一轨迹预测或观测结果存在误差,则车辆控制会存在较大偏移。
6、因此,现有的高速公路自动驾驶变道轨迹预测方法,对车辆轨迹预测准确率较低,车辆行驶安全和运输效率难以实现最优化求解。
技术实现思路
1、本发明的主要目的在于提供一种自动驾驶车辆高速公路变道轨迹预测的方法、系统、终端设备及存储介质,旨在提高车辆轨迹预测准确率,提升车辆行驶安全和运输效率。
2、为实现上述目的,本发明实施例提供一种自动驾驶车辆高速公路变道轨迹预测的方法,所述方法包括以下步骤:
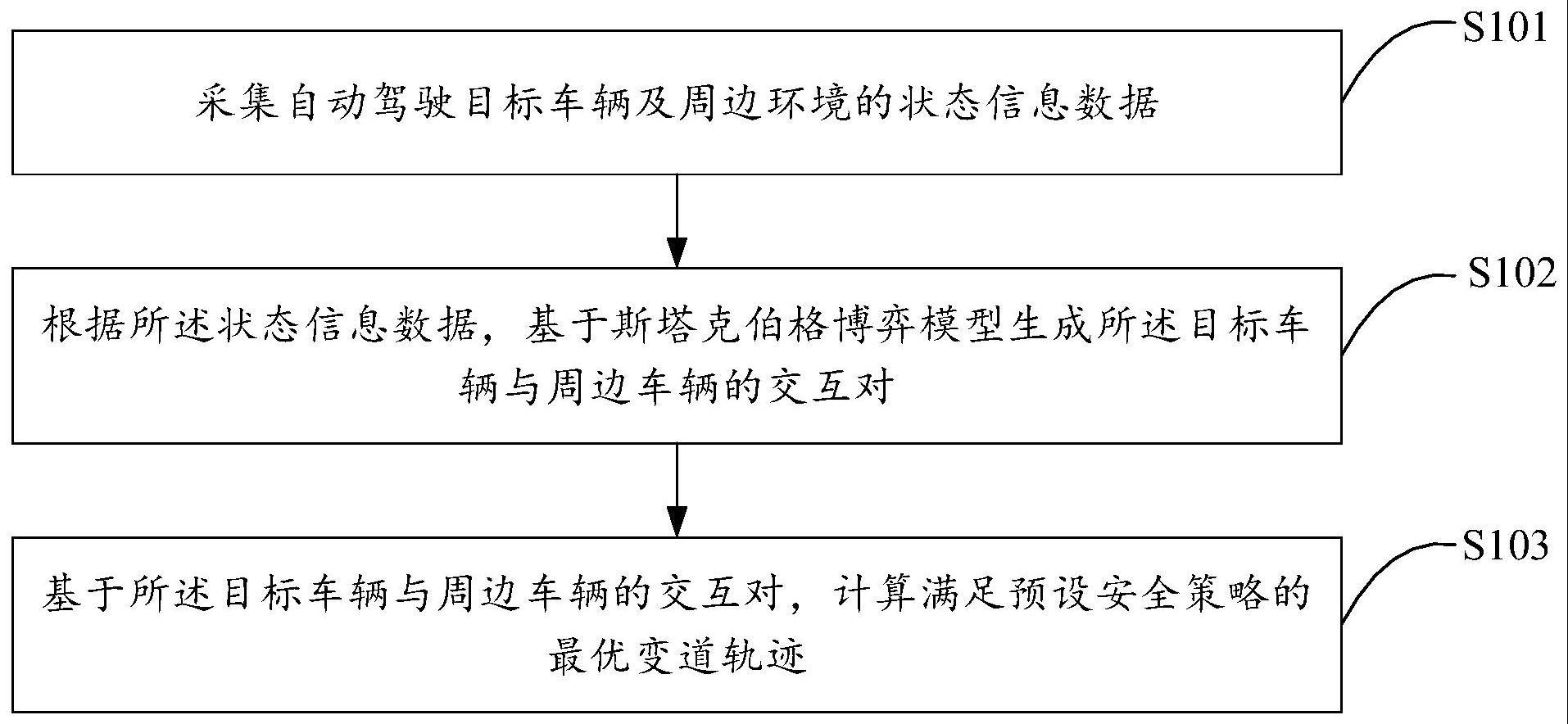
3、采集自动驾驶目标车辆及周边环境的状态信息数据;
4、根据所述状态信息数据,基于斯塔克伯格博弈模型生成所述目标车辆与周边车辆的交互对;
5、基于所述目标车辆与周边车辆的交互对,计算满足预设安全策略的最优变道轨迹。
6、可选地,所述采集自动驾驶目标车辆及周边环境的状态信息数据的步骤包括:
7、通过传感器实时采集所述目标车辆及周边环境的状态信息数据,获得所述目标车辆的速度、加速度、航向角、质心侧偏角,以及获得周边车辆的速度、加速度、航向角。
8、可选地,所述根据所述状态信息数据,基于斯塔克伯格博弈模型生成所述目标车辆与周边车辆的交互对的步骤包括:
9、根据所述状态信息数据,对所述目标车辆进行多种加速度配置,利用五次多项式生成多条轨迹;
10、结合生成的多条轨迹,基于斯塔克伯格博弈模型建立所述目标车辆与周边车辆的交互模型,确定所述目标车辆为领队车辆,其余车辆为跟随车辆,生成所述目标车辆与周边车辆的交互对。
11、可选地,所述基于所述目标车辆与周边车辆的交互对,计算满足预设安全策略的最优变道轨迹的步骤包括:
12、针对所述交互对设计奖励函数;
13、基于所述奖励函数生成所述交互对的观察向量;
14、使用模仿学习计算所述交互对生成变道轨迹的数量及概率;
15、基于所述交互对生成变道轨迹的数量及概率,设计安全约束,并利用mpc算法求取满足最优安全策略的最优变道轨迹。
16、可选地,所述方法还包括:
17、判断所述最优轨迹是否满足车辆动力学约束;
18、根据判断结果确定进行变道或放弃决策。
19、可选地,所述方法还包括:
20、在连续空间中进行目标车辆的状态更新,获得下一周期的数据。
21、可选地,所述奖励函数包含安全性参数、跟随车辆的目标状态、舒适性参数中的一种或多种,所述安全约束包括:设计速度、加速度、航向角、质心侧偏角约束中的一种或多种。
22、本发明还提出一种自动驾驶车辆高速公路变道轨迹预测的系统,所述系统包括:
23、采集模块,用于采集自动驾驶目标车辆及周边环境的状态信息数据;
24、生成模块,用于根据所述状态信息数据,基于斯塔克伯格博弈模型生成所述目标车辆与周边车辆的交互对;
25、基于所述目标车辆与周边车辆的交互对,计算满足预设安全策略的最优变道轨迹。
26、本发明还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上所述的自动驾驶车辆高速公路变道轨迹预测的方法。
27、本发明还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的自动驾驶车辆高速公路变道轨迹预测的方法。
28、本发明实施例提出的自动驾驶车辆高速公路变道轨迹预测的方法、系统、终端设备及存储介质,通过采集自动驾驶目标车辆及周边环境的状态信息数据;根据所述状态信息数据,基于斯塔克伯格博弈模型生成所述目标车辆与周边车辆的交互对;基于所述目标车辆与周边车辆的交互对,计算满足预设安全策略的最优变道轨迹。本发明方案利用博弈模型进行车辆预测,解决当前主流决策模型使用固定动力学模型方法而无法提高预测准确率的问题;此外,考虑了自车与周边车辆的交互,可以处理交互的不确定性,解决了当前大部分决策模型自车与周边车辆无交互的问题,将自车的安全限制的相关约束使用优化问题求解,提升决策的正确性、成功率和安全性。进一步地,使用连续状态空间求解,解决现在部分决策模型离散状态空间计算复杂度较高的问题,提升求解效率。
技术特征:
1.一种自动驾驶车辆高速公路变道轨迹预测的方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述采集自动驾驶目标车辆及周边环境的状态信息数据的步骤包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述状态信息数据,基于斯塔克伯格博弈模型生成所述目标车辆与周边车辆的交互对的步骤包括:
4.根据权利要求1所述的方法,其特征在于,所述基于所述目标车辆与周边车辆的交互对,计算满足预设安全策略的最优变道轨迹的步骤包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求4所述的方法,其特征在于,所述奖励函数包含安全性参数、跟随车辆的目标状态、舒适性参数中的一种或多种,所述安全约束包括:设计速度、加速度、航向角、质心侧偏角约束中的一种或多种。
8.一种自动驾驶车辆高速公路变道轨迹预测的系统,其特征在于,所述系统包括:
9.一种终端设备,其特征在于,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1-7中任一项所述的自动驾驶车辆高速公路变道轨迹预测的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的自动驾驶车辆高速公路变道轨迹预测的方法。
技术总结
本发明公开了一种自动驾驶车辆高速公路变道轨迹预测的方法及相关设备,该方法包括:采集自动驾驶目标车辆及周边环境的状态信息数据;根据状态信息数据,基于斯塔克伯格博弈模型生成目标车辆与周边车辆的交互对;基于目标车辆与周边车辆的交互对,计算满足预设安全策略的最优变道轨迹。本发明方案解决了当前主流决策模型使用固定动力学模型方法而无法提高预测准确率的问题;考虑了自车与周边车辆的交互,可以处理交互的不确定性,解决了当前大部分决策模型自车与周边车辆无交互的问题,将自车的安全限制的相关约束使用优化问题求解,提升决策的正确性、成功率和安全性。
技术研发人员:程增木
受保护的技术使用者:上海航盛智行电子科技发展有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!