一种自动驾驶汽车集成式决控的静态路径优选方法及装置
本技术涉及汽车智能驾驶,特别涉及一种自动驾驶汽车集成式决控的静态路径优选方法及装置。
背景技术:
1、以自动驾驶为代表的智能汽车技术是新一轮科技革命的核心组成,正成为世界各工业强国的战略竞争高地。面向高级别自动驾驶的集成式决控将自动驾驶决控任务整合为一个约束型最优控制问题,可提升自动驾驶汽车整体智能性,适应性和安全性。
2、相关技术中,主要包括静态路径规划和动态跟踪控制两个模块,其中静态路径规划模块是根据静态道路环境信息生成可跟踪的备选路径集合,动态跟踪控制将路径跟踪问题构造成一个约束型最优控制问题,实现参考路径优选和车辆跟踪避障。
3、然而,相关技术中,由于集成式决控动态跟踪控制将决策,规划和控制融合为一体,使得存在功能集成度高、算法设计复杂、计算规模大和实时性差的问题,亟待解决。
技术实现思路
1、本技术提供一种自动驾驶汽车集成式决控的静态路径优选方法及装置,以解决相关技术中,由于集成式决控动态跟踪控制将决策,规划和控制融合为一体,使得存在功能集成度高、算法设计复杂、计算规模大和实时性差的问题。
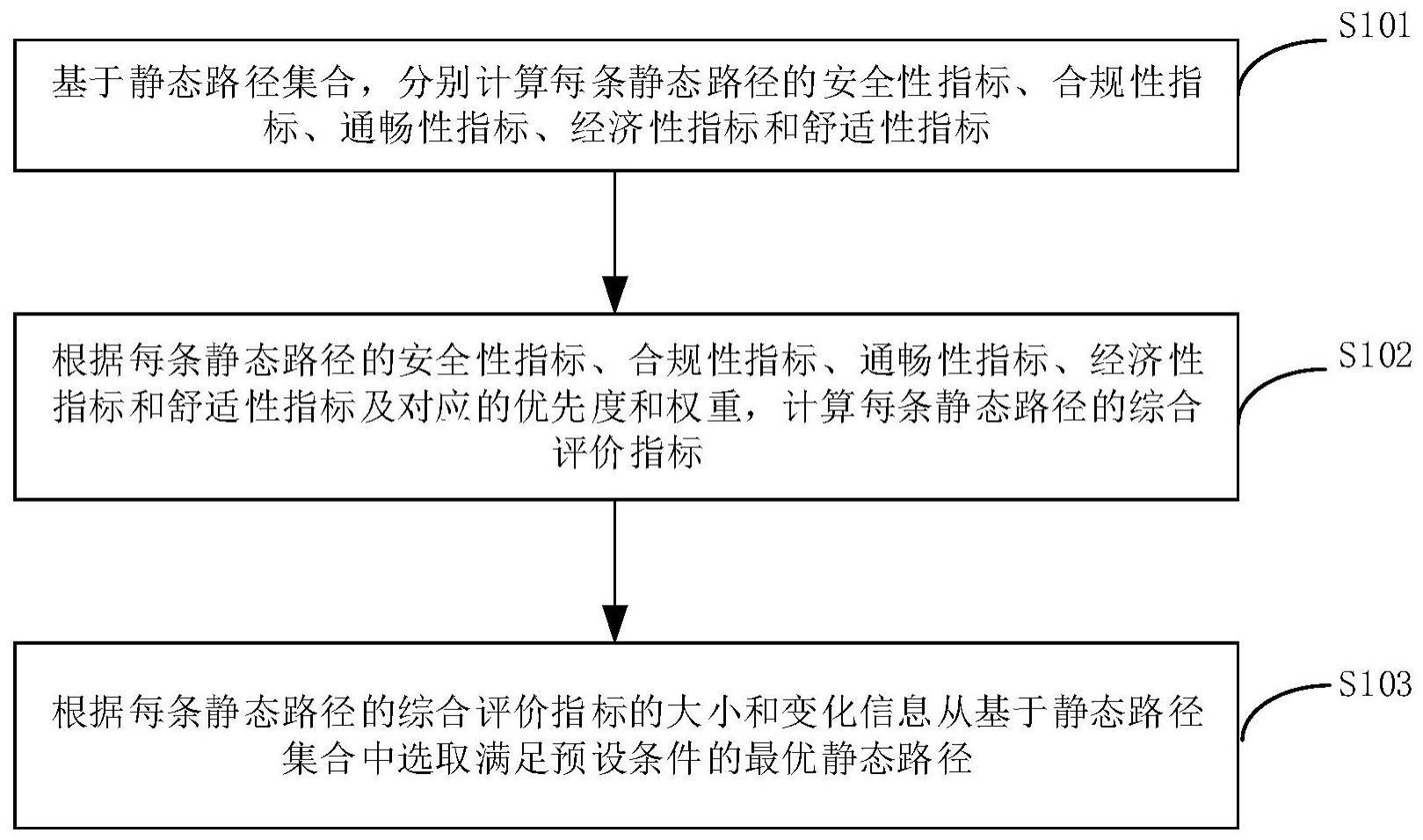
2、本技术第一方面实施例提供一种自动驾驶汽车集成式决控的静态路径优选方法,包括以下步骤:基于静态路径集合,分别计算每条静态路径的安全性指标、合规性指标、通畅性指标、经济性指标和舒适性指标;根据所述每条静态路径的安全性指标、合规性指标、通畅性指标、经济性指标和舒适性指标及对应的优先度和权重,计算所述每条静态路径的综合评价指标;以及根据所述每条静态路径的综合评价指标的大小和变化信息从所述基于静态路径集合中选取满足预设条件的最优静态路径。
3、可选地,在本技术的一个实施例中,其中,
4、所述安全性指标的计算公式为:
5、
6、其中,表示当前时刻t静态路径τ的安全性指标,∏为静态路径的集合,t∈[t,t+δt]表示以当前时刻t为起始的预测时域,δt表示预测时长,j∈{1,2,…,j}表示t时刻交通参与者编号,其总数量为j;表示预测时域内在t时刻车辆沿着在静态路径τ行驶时,交通参与者i与自车发生假设性碰撞导致的碰撞双方总体损伤;ωd表示距离衰减系数,ωt表示时间衰减系数;
7、所述合规性指标的计算公式为:
8、
9、其中,为当前时刻t备选静态路径τ的合规性指标,为车辆换道到(或者继续行驶在)静态路径τ所在车道时违反不按指定车道行驶规定的代价;
10、所述通畅性指标的计算公式为:
11、
12、其中,表示当前时刻t静态路径τ所在车道的通畅性,和分别表示当前时刻t静态路径τ所在车道内最近前车与自车的距离和速度,ωd和ωv分别为和的权重,可根据通行效率对前车距离和速度的需求设定,且有ωd+ωv=1;
13、所述经济性指标的计算公式为:
14、
15、其中,表示当前时刻t静态路径τ的经济性指标,f(·)表示自车的百公里油耗模型,表示当前时刻t静态路径τ所在车道内所有车辆的平均速度;
16、所述舒适性指标的计算公式为:
17、
18、其中,表示当前时刻t静态路径τ舒适性指标,表示当前时刻t第i∈{1,2,…,n}车辆的纵向加速度,n表示静态路径τ所在车道内所有周车的数量。
19、可选地,在本技术的一个实施例中,所述综合评价指标的计算公式为:
20、
21、其中,表示当前时刻t静态路径τ的综合评价指标,ω1,ω2,ω3,ω4,ω5分别为安全性、合规性、通畅性、经济性、舒适性权重系数,表示归一化后的当前时刻t静态路径τ的*指标。
22、可选地,在本技术的一个实施例中,所述根据所述每条静态路径的综合评价指标的大小和变化信息从所述基于静态路径集合中选取满足预设条件的最优静态路径,包括:以最大化综合评价指标的方式选取所述最优静态路径;根据所述综合评价指标的变化信息设定所述最优静态路径的更新频率。
23、可选地,在本技术的一个实施例中,所述更新频率为:
24、
25、其中,表示时刻的最优静态路径,表示时刻最优静态路径的综合评价指标,δj表示静态路径更新所允许的综合评价指标变化阈值。
26、本技术第二方面实施例提供一种自动驾驶汽车集成式决控的静态路径优选装置,包括:第一计算模块,用于基于静态路径集合,分别计算每条静态路径的安全性指标、合规性指标、通畅性指标、经济性指标和舒适性指标;第二计算模块,用于根据所述每条静态路径的安全性指标、合规性指标、通畅性指标、经济性指标和舒适性指标及对应的优先度和权重,计算所述每条静态路径的综合评价指标;以及选取模块,用于根据所述每条静态路径的综合评价指标的大小和变化信息从所述基于静态路径集合中选取满足预设条件的最优静态路径。
27、可选地,在本技术的一个实施例中,其中,
28、所述安全性指标的计算公式为:
29、
30、其中,表示当前时刻t静态路径τ的安全性指标,∏为静态路径的集合,t∈[t,t+δt]表示以当前时刻t为起始的预测时域,δt表示预测时长,j∈{1,2,…,}表示t时刻交通参与者编号,其总数量为j;表示预测时域内在t时刻车辆沿着在静态路径τ行驶时,交通参与者i与自车发生假设性碰撞导致的碰撞双方总体损伤;ωd表示距离衰减系数,ωt表示时间衰减系数;
31、所述合规性指标的计算公式为:
32、
33、其中,为当前时刻t备选静态路径τ的合规性指标,为车辆换道到(或者继续行驶在)静态路径τ所在车道时违反不按指定车道行驶规定的代价;
34、所述通畅性指标的计算公式为:
35、
36、其中,表示当前时刻t静态路径τ所在车道的通畅性,和分别表示当前时刻t静态路径τ所在车道内最近前车与自车的距离和速度,ωd和ωv分别为和的权重,可根据通行效率对前车距离和速度的需求设定,且有ωd+v=1;
37、所述经济性指标的计算公式为:
38、
39、其中,表示当前时刻t静态路径τ的经济性指标,f(·)表示自车的百公里油耗模型,表示当前时刻t静态路径τ所在车道内所有车辆的平均速度;
40、所述舒适性指标的计算公式为:
41、
42、其中,表示当前时刻t静态路径τ舒适性指标,表示当前时刻t第i∈{1,2,…,}车辆的纵向加速度,n表示静态路径τ所在车道内所有周车的数量。
43、可选地,在本技术的一个实施例中,所述综合评价指标的计算公式为:
44、
45、其中,表示当前时刻t静态路径τ的综合评价指标,ω1,ω2,ω3,ω4,ω5分别为安全性、合规性、通畅性、经济性、舒适性权重系数,表示归一化后的当前时刻t静态路径τ的*指标。
46、可选地,在本技术的一个实施例中,所述选取模块包括:
47、选取单元,用于以最大化综合评价指标的方式选取所述最优静态路径;
48、设定单元,用于根据所述综合评价指标的变化信息设定所述最优静态路径的更新频率。
49、可选地,在本技术的一个实施例中,所述更新频率为:
50、
51、其中,表示时刻的最优静态路径,表示时刻最优静态路径的综合评价指标,δj表示静态路径更新所允许的综合评价指标变化阈值。
52、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的一种自动驾驶汽车集成式决控的静态路径优选方法。
53、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的一种自动驾驶汽车集成式决控的静态路径优选方法。
54、本技术实施例以安全性指标、合规性指标、通畅性指标、经济性指标和舒适性指标等五维评价指标评估静态路径,贴近人类驾驶员决策过程,提高自动驾驶汽车决策合理性和社会兼容性;通过加权融合五维评价指标得到综合评价指标,有助于实现自动驾驶车辆个性化决策,满足不同驾驶员/乘客的驾驶特性需求;根据综合评价指标大小和变化选取当前最优静态路径,避免动态跟踪控制功能计算规模随静态轨迹数量线性增加,进而提高集成式决控整体实时性。由此,解决了相关技术中,由于集成式决控动态跟踪控制将决策,规划和控制融合为一体,使得存在功能集成度高、算法设计复杂、计算规模大和实时性差的问题。
55、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!