轮毂电机驱动越野车辆原地转向控制方法、系统及介质
本发明涉及车辆,尤其是一种轮毂电机驱动越野车辆原地转向控制方法、系统及介质。
背景技术:
1、相关技术中,车辆最小转向半径是衡量车辆转向性能的一个重要指标,表示车辆能通过狭窄弯曲路面的能力,其值越小说明车辆的转向灵活性越佳。目前的车辆大都采用阿克曼转向形式,最小转向半径可以达到4.5-12m,在遇到狭窄或危险路面依然存在转向机动性不足问题,为此出现了全轮转向车辆,通过额外加装四轮转向装置实现原地转向,但这样将增加车辆的机械结构复杂度与成本,同时还提升了各转向以及驱动系统的控制难度。目前针对分布式驱动车辆,凭借其各轮转矩独立可控的优势,借鉴履带式车辆滑移转向原理,通过控制左右两侧车轮异向转动,使其转向半径为零,达到车辆的原地转向目的,相较于传统车辆极大地提升了其转向灵活性,特别是具有专业用途的越野车,原地转向功能使其能够在窄巷、断头险路、桥头、拥挤停车等狭窄空间内完成越野车的快速转向或调头。
2、然而针对分布式驱动车辆理论研究大多数停留在平坦路面上的纵向、侧向运动学分析,未对越野公开的斜坡转向进行研究,而越野车会遇到一些狭窄坡道路面,使得现有越野车的转向技术无法在复杂工况下适用。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种轮毂电机驱动越野车辆原地转向控制方法、系统及介质,能够有效提高越野车在复杂工况下的转向适用性。
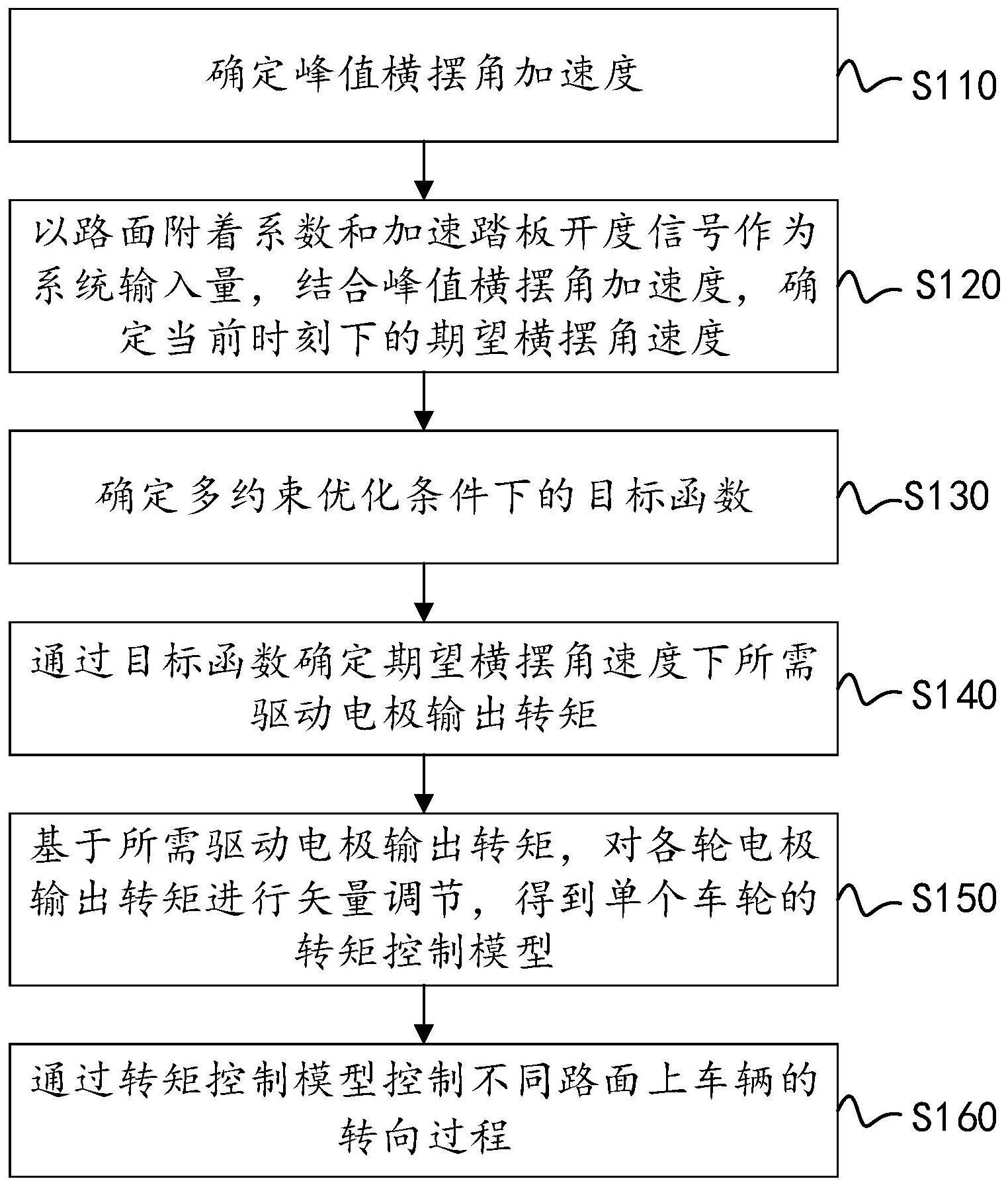
2、一方面,本发明实施例提供了一种轮毂电机驱动越野车辆原地转向控制方法,包括以下步骤:
3、确定峰值横摆角加速度;
4、以路面附着系数和加速踏板开度信号作为系统输入量,结合所述峰值横摆角加速度,确定当前时刻下的期望横摆角速度;
5、确定多约束优化条件下的目标函数,所述多约束优化条件包括期望状态跟踪能力、控制量和控制增量极值约束问题;
6、通过所述目标函数确定所述期望横摆角速度下所需驱动电极输出转矩;
7、基于所述所需驱动电极输出转矩,对各轮电极输出转矩进行矢量调节,得到单个车轮的转矩控制模型;
8、通过所述转矩控制模型控制不同路面上车辆的转向过程。
9、在一些实施例中,所述确定峰值横摆角加速度,包括:
10、确定车辆原地转向中横摆力矩方程和原地转向中转向阻力矩方程;
11、在车辆开始横摆运动时,确定车辆轮胎在附着极限下的纵向力与侧向力的关系式;
12、获取车辆在附着极限下的第一车辆纵向力,以及车辆启动时的第二车辆纵向力;
13、根据所述关系式、所述第一车辆纵向力和所述第二车辆纵向力确定车辆转向横摆力矩克服阻力矩开始原地转向运动的约束条件;
14、根据所述横摆力矩方程、所述转向阻力矩方程和所述约束条件计算得到所述峰值横摆角加速度。
15、在一些实施例中,所述以路面附着系数和加速踏板开度信号作为系统输入量,结合所述峰值横摆角加速度,确定当前时刻下的期望横摆角速度的计算公式如下:
16、
17、其中,γd表示期望横摆角速度,表示期望横摆角加速度,表示峰值横摆角加速度,t表示当前时刻,ts表示不同附着路面极限下单位响应时间。
18、在一些实施例中,所述目标函数的表达式如下:
19、
20、其中,j(k)表示目标函数,np表示预测时域,nc表示控制时域,ρ表示权重系数,ε表示正值松弛因子,q和r均表示预设维度的权重矩阵,δut表示在t时刻的控制增量,δumin表示所述控制增量的下限值,δumax表示所述控制增量的上限值,ut表示在t时刻的控制量,umin表示所述控制量的下限值,umax表示所述控制量的上限值,表示对系统期望状态的跟踪性,表示对系统控制量的约束能力,ρε2表示在系统无有可行解,s.t.表示满足约束条件、η(k+i)表示k+i时刻的输出量、ηr(k+i)表示k+i时刻的期望输出量、δu(k+i)表示k+i时刻的输入量相较于上一时刻的变化量。
21、在一些实施例中,所述通过所述目标函数确定所述期望横摆角速度下所需驱动电极输出转矩,包括:
22、求解所述目标函数中首个元素作为系统最佳控制增量;
23、根据所述最佳控制增量确定当前时刻状态反馈控制率,将当前时刻状态反馈控制率作为所述期望横摆角速度下所需驱动电极输出转矩。
24、在一些实施例中,所述单个车轮的转矩控制模型表达式如下:
25、
26、其中,fzi表示估计的车轮垂直载荷,表示车轮的加速度,g表示重力加速度,fxi表示车轮纵向力,fri表示行驶阻力,ti表示驱动轮输出转矩,j表示目标函数,表示车轮的角角速度,r表示车轮的滚动半径。
27、在一些实施例中,所述通过所述转矩控制模型控制不同路面上车辆的转向过程,包括:
28、当车辆在坡道路面上进行转向运动时,基于轮荷转移的转矩补偿策略对各个车轮转矩进行重构分配,所述重构分配的表达式如下:
29、
30、其中,tri(i=1,2,3,4)表示基于实时轴荷转移补偿的各车驱动转矩分配值,ζ表示后轴车轮转矩分配系数,tr表示后轴所需力矩。
31、另一方面,本发明实施例提供了一种轮毂电机驱动越野车辆原地转向控制系统,包括:
32、第一模块,用于确定峰值横摆角加速度;
33、第二模块,用于以路面附着系数和加速踏板开度信号作为系统输入量,结合所述峰值横摆角加速度,确定当前时刻下的期望横摆角速度;
34、第三模块,用于确定多约束优化条件下的目标函数,所述多约束优化条件包括期望状态跟踪能力、控制量和控制增量极值约束问题;
35、第四模块,用于通过所述目标函数确定所述期望横摆角速度下所需驱动电极输出转矩;
36、第五模块,用于基于所述所需驱动电极输出转矩,对各轮电极输出转矩进行矢量调节,得到单个车轮的转矩控制模型;
37、第六模块,用于通过所述转矩控制模型控制不同路面上车辆的转向过程。
38、另一方面,本发明实施例提供了一种轮毂电机驱动越野车辆原地转向控制系统,包括:
39、至少一个存储器,用于存储程序;
40、至少一个处理器,用于加载所述程序以执行所述的轮毂电机驱动越野车辆原地转向控制方法。
41、另一方面,本发明实施例提供了一种计算机存储介质,其中存储有计算机可执行的程序,所述计算机可执行的程序被处理器执行时用于实现所述的轮毂电机驱动越野车辆原地转向控制方法。
42、本发明实施例提供的一种轮毂电机驱动越野车辆原地转向控制方法,具有如下有益效果:
43、本实施例通过在确定峰值横摆角加速度后,以路面附着系数和加速踏板开度信号作为系统输入量,结合峰值横摆角加速度,确定当前时刻下的期望横摆角速度,接着在确定多约束优化条件下的目标函数后,通过目标函数确定期望横摆角速度下所需驱动电极输出转矩,然后基于所需驱动电极输出转矩,对各轮电极输出转矩进行矢量调节,得到单个车轮的转矩控制模型,再通过转矩控制模型控制不同路面上车辆的转向过程,从而可以使得车辆能够在窄巷、断头险路、桥头、拥挤停车等狭窄空间内完成快速转向或调头,有效提高越野车在复杂工况下的转向适用性。
44、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!