智能辅助驾驶分层决策方法、系统、电子设备及存储介质与流程
本发明属于智能驾驶的,具体地涉及一种智能辅助驾驶分层决策方法、系统、电子设备及存储介质。
背景技术:
1、随着交通事故发生率的逐年攀升,行车安全作为现代交通的重要组成部分引起了广泛关注;智能驾驶技术被视为提高智能车辆行驶安全的一种解决方案。辅助驾驶系统是当前智能驾驶技术的主要体现,可在一定程度上辅助驾驶员实现对车辆的控制。由于驾驶场景具有复杂性及不确定性的特性,不同驾驶员对于同一场景的认知不尽相同,因此如何实现安全、合理的驾驶行为决策是辅助驾驶系统领域的研究重点。
2、目前,针对辅助驾驶系统的智能车辆驾驶行为选择的研究,多数根据驾驶场景下的环境信息做出驾驶行为决策;诸如专利cn115061747a公开的一种用于车辆的辅助驾驶方法,其通过基于获取的车辆状态及周围环境信息对车辆做出驾驶行为决策。然而,驾驶员作为辅助驾驶系统的重要一环,因此驾驶员状态及驾驶意图信息应作为影响驾驶行为决策的考虑因素之一,以避免驾驶员不信任辅助驾驶系统或驾驶员过度依赖辅助驾驶系统引发交通事故。此外,智能车辆的不同辅助驾驶功能朝多元化发展,如何协调功能间的切换问题也逐渐凸显;诸如专利cn110834637a公开的一种驾驶模式的切换方法,其通过基于道路交通状况对拥堵自动驾驶模式和高级自动驾驶模式进行切换。然而,不同驾驶模式之间可能存在着相同的驾驶行为,驾驶模式的切换将可能引起不同驾驶模式下同一驾驶行为状态的频繁切换。
3、因此,如何基于充分考虑驾驶员状态及驾驶意图和车辆周边环境等因素的基础上,进一步减少辅助驾驶系统状态间的频繁切换,是本领域技术人员亟待解决的课题。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种智能辅助驾驶分层决策方法、系统、电子设备及存储介质,可保证车辆辅助驾驶的安全性及舒适性的同时,提高驾驶员对智能辅助驾驶系统的接受度。
2、第一方面,本技术提供一种智能辅助驾驶分层决策方法,包括:
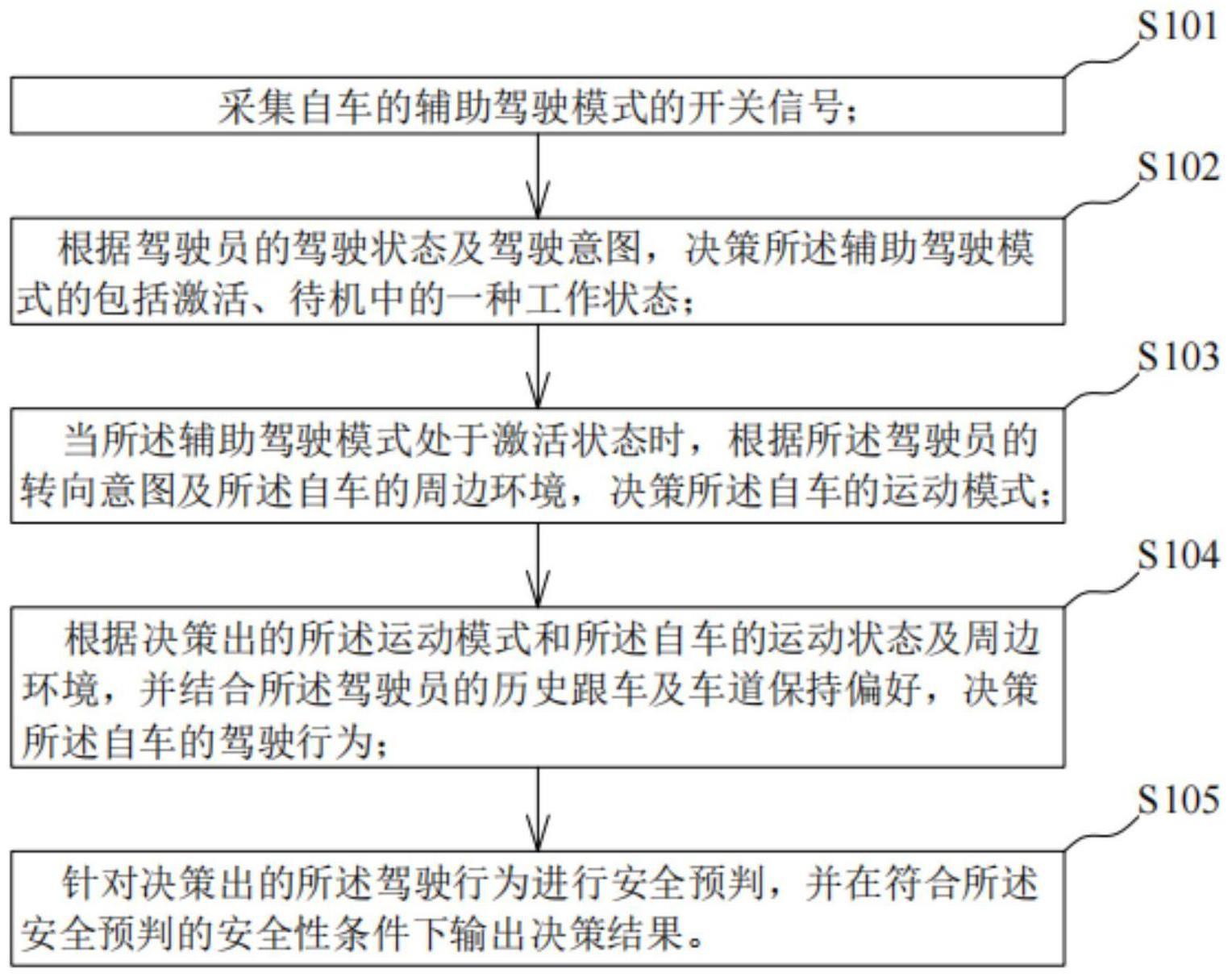
3、采集自车的辅助驾驶模式的开关信号;
4、根据驾驶员的驾驶状态及驾驶意图,决策所述辅助驾驶模式的包括激活、待机中的一种工作状态;其中,所述驾驶状态包括离手、分心、疲劳、哈欠中的至少一种异常状态,所述驾驶意图包括加速、制动减速、转动方向盘中的至少一种驾驶操作请求;
5、当所述辅助驾驶模式处于激活状态时,根据所述驾驶员的转向意图及所述自车的周边环境,决策所述自车的运动模式;其中,所述运动模式包括纵向运动模式、横向运动模式、横纵向综合运动模式中的一种;
6、根据决策出的所述运动模式和所述自车的运动状态及周边环境,并结合所述驾驶员的历史跟车及车道保持偏好,决策所述自车的驾驶行为;其中,所述驾驶行为包括自适应巡航、增大距离纵向跟车、减小距离纵向跟车、纵向跟车、车道保持、横向跟车中的一种或两种;
7、针对决策出的所述驾驶行为进行安全预判,并在符合所述安全预判的安全性条件下输出决策结果。
8、较佳地,所述根据驾驶员的驾驶状态及驾驶意图,决策所述辅助驾驶模式的包括激活、待机中的一种工作状态的步骤具体包括:
9、判断所述辅助驾驶模式由待机切换到激活是否符合切换拟制条件;
10、若是,则表示所述辅助驾驶模式由待机切换到激活状态存在抑制条件;
11、若否,则表示所述辅助驾驶模式由待机切换到激活状态不存在抑制条件;
12、其中,所述切换拟制条件为:①驾驶员状态存在异常,②驾驶员加速请求的意图动作大于辅助驾驶系统输出的控制请求量,③驾驶员存在制动减速请求,④驾驶员转动方向盘的意图动作大于辅助驾驶系统输出的控制请求量,四个命题中的任意一个命题成立,表示为:
13、c11=(x∈驾驶员状态异常)∨(tdriver>tadas)∨(tbrake>0)∨(δdriver>δadas),
14、式中,若c11为真命题,则表示符合切换拟制条件,否则表示不符合切换拟制条件;x表示驾驶员的当前状态,驾驶员状态异常={离手、分心、疲劳、哈欠};tdriver表示驾驶员加速请求扭矩,tadas表示辅助驾驶系统驱动控制的请求扭矩;tbrake表示驾驶员制动踏板开度请求值;δdriver表示驾驶员方向盘转角请求值,δadas表示辅助驾驶系统方向盘转角的控制请求量。
15、较佳地,所述当所述辅助驾驶模式处于激活状态时,根据所述驾驶员的转向意图及所述自车的周边环境,决策所述自车的运动模式的步骤具体包括:
16、获取所述辅助驾驶模式处于激活状态的信号;
17、根据左转向灯或右转向灯被激活状态识别出所述驾驶员的转向意图;
18、判断所述驾驶员的转向意图是否符合第一换道可行性拟制条件;
19、若是,则直接决策所述自车的运动模式为横向运动模式;
20、若否,则决策所述自车的运动模式处于横纵向综合运动状态;
21、其中,所述第一换道可行性拟制条件为:①驾驶员请求换道方向的车道数量不小于1,②驾驶员请求换道方向的车道线具有可见性,③驾驶员请求换道方向的车道线线型为可换道类型,三个命题同时成立,表示为:
22、c21=(nlc≥1)∧(vislc=1)∧(ltlc=1)
23、式中,若c21为真命题,则表示换道不符合换道可行性拟制条件,否则表示符合换道可行性拟制条件;nlc表示驾驶员请求换道方向的车道数量;vislc表示驾驶员请求换道方向车道线的可见性,且vislc∈{0,1},其中0和1分别表示不可见和可见;ltlc表示驾驶员请求换道方向车道线类型的可换道性,且ltlc∈{0,1},其中0和1分别表示不允许换道线型和允许换道线型。
24、较佳地,所述决策所述自车的运动模式处于横纵向综合运动状态的步骤之后,所述方法还包括:
25、判断处于横纵向综合运动状态的所述自车是否符合第二换道可行性拟制条件;
26、若是,则直接决策所述自车的运动模式为纵向运动模式;
27、若否,则直接决策所述自车的运动模式为横纵向综合运动模式;
28、其中,所述第二换道可行性拟制条件为:①自车所在车道两侧车道线不完全可见,②无前车或有前车但自车车速高于设定阈值,两个命题同时成立,表示为:
29、c22=(visl+visr≤1)∧((npv=0)∨((npv>0)∧(v>v0)))
30、式中,若c22为真命题,则表示符合第二换道可行性拟制条件,否则表示不符合第二换道可行性拟制条件;visl和visr分别表示自车所在车道左、右侧车道线的可见性,visl和visr∈{0,1},其中0和1分别表示不可见和可见;npv表示自车所在车道前方的车辆数;v和v0分别表示自车车速和车辆可进行横向跟车的最大速度阈值。
31、较佳地,所述根据决策出的所述运动模式和所述自车运动状态及周边环境,并结合所述驾驶员的历史跟车及车道保持偏好,决策所述自车的驾驶行为的步骤具体包括:
32、当决策出的所述运动模式为横向运动模式,则根据所述驾驶员的转向意图直接决策所述自车的驾驶行为为左换道驾驶行为或右换道驾驶行为;
33、当决策出的所述运动模式为纵向运动模式,则判断是否符合纵向跟车条件;若不符合,则决策所述自车的驾驶行为为自适应巡航驾驶行为;若符合,则结合驾驶员历史跟车偏好捕捉到与否,决策所述自车的驾驶行为为增大距离纵向跟车、减小距离纵向跟车或纵向跟车的纵向跟车驾驶行为;
34、当决策出的所述运动模式为横纵向综合运动模式,则判断是否符合纵向跟车条件;若不符合,则决策所述自车的驾驶行为为自适应巡航驾驶行为;若符合,则结合驾驶员车道保持偏好及自车车道两侧车道线清晰与否,决策所述自车的驾驶行为为纵向跟车及车道保持驾驶行为、纵向跟车及横向跟车驾驶行为或车道保持驾驶行为;
35、其中,所述纵向跟车条件为:①自车所在车道前方存在车辆,②车间时距小于设定阈值,两个命题同时成立,表示为:
36、c23=(npv>0)∧(thw≤τ0)
37、式中,若c23为真命题,则表示符合纵向跟车条件,否则表示不符合纵向跟车条件;npv表示自车所在车道前方的车辆数;thw表示自车与前车的车间时距,τ0表示跟车最大车间时距阈值。
38、较佳地,所述驾驶员的历史跟车及车道保持偏好具体包括:
39、当自车在含有纵向跟车驾驶行为的状态下稳定行驶时,若驾驶员加速请求的意图动作大于辅助驾驶系统输出的控制请求量,且驾驶员结束加速请求时的纵向跟车时距相比介入之前有所减小,则推断驾驶员具有减小纵向跟车距离的驾驶偏好;
40、当自车在含有纵向跟车驾驶行为的状态下稳定行驶时,若驾驶员制动减速请求的意图动作大于辅助驾驶系统输出的控制请求量,且驾驶员结束制动减速请求时的纵向跟车时距相比介入之前有所增加,则推断驾驶员具有增大纵向跟车距离的驾驶偏好;
41、当自车在含有车道保持驾驶行为的状态下稳定行驶时,若驾驶员转向请求的意图动作大于辅助驾驶系统输出的控制请求量,且驾驶员结束转向介入时相比介入之前的车道保持中心向左或向右偏移,则推断驾驶员具有向左或向右车道保持的驾驶偏好。
42、较佳地,所述安全性条件为:①当前所在车道碰撞风险小于一定的阈值,②目标决策车道碰撞风险小于一定的阈值,两个命题同时成立,表示为:
43、c31=(f1<fe)∧(f2<f0)
44、式中,若c31为真命题,则表示符合安全性条件,否则表示不符合驾驶行为安全性条件;f1和fe分别表示当前所在车道碰撞风险和对应的碰撞风险阈值,f2和f0分别表示目标决策车道碰撞风险和对应的碰撞风险阈值,当且仅当目标决策车道与当前所在车道为同一车道时,fe=f0;其中,所述当前所在车道碰撞风险表示为:
45、
46、式中,m表示自车等效质量;e表示自然底数;k1和k2分别表示距离系数和速度系数;v表示自车速度;i=1,2分别表示自车所在车道或目标决策车道中位于自车前、后的障碍物;ri∈{0,1}为方向系数,分别表示目标障碍物在自车行驶方向的前、后位置;g表示常数系数;mi表示障碍物i的等效质量;di表示自车与障碍物i的相对距离;vi表示障碍物i的行驶速度,θi表示障碍物i速度方向与自车矢量距离方向的夹角。
47、第二方面,本技术提供一种智能辅助驾驶分层决策系统,包括:
48、采集模块,用于采集自车的辅助驾驶模式的开关信号;
49、第一决策模块,用于根据驾驶员的驾驶状态及驾驶意图,决策所述辅助驾驶模式的包括激活、待机中的一种工作状态;其中,所述驾驶状态包括离手、分心、疲劳、哈欠中的至少一种异常状态,所述驾驶意图包括加速、制动减速、转动方向盘中的至少一种驾驶操作请求;
50、第二决策模块,当所述辅助驾驶模式处于激活状态时,根据所述驾驶员的转向意图及所述自车的周边环境,决策所述自车的运动模式;其中,所述运动模式包括纵向运动模式、横向运动模式、横纵向综合运动模式中的一种;
51、第三决策模块,根据决策出的所述运动模式和所述自车的运动状态及周边环境,并结合所述驾驶员的历史跟车及车道保持偏好,决策所述自车的驾驶行为;其中,所述驾驶行为包括自适应巡航、增大距离纵向跟车、减小距离纵向跟车、纵向跟车、车道保持、横向跟车中的一种或两种;
52、输出模块,用于针对决策出的所述驾驶行为进行安全预判,并在符合所述安全预判的安全性条件下输出决策结果。
53、较佳地,所述第一决策模块具体包括:
54、第一判断单元,用于判断所述辅助驾驶模式由待机切换到激活是否符合切换拟制条件;其中,所述切换拟制条件为:①驾驶员状态存在异常,②驾驶员加速请求的意图动作大于辅助驾驶系统输出的控制请求量,③驾驶员存在制动减速请求,④驾驶员转动方向盘的意图动作大于辅助驾驶系统输出的控制请求量,四个命题中的任意一个命题成立,表示为:
55、c11=(x∈驾驶员状态异常)∨(tdriver>tadas)∨(tbrake>0)∨(δdriver>δadas),
56、式中,若c11为真命题,则表示符合切换拟制条件,否则表示不符合切换拟制条件;x表示驾驶员的当前状态,驾驶员状态异常={离手、分心、疲劳、哈欠};tdriver表示驾驶员加速请求扭矩,tadas表示辅助驾驶系统驱动控制的请求扭矩;tbrake表示驾驶员制动踏板开度请求值;δdriver表示驾驶员方向盘转角请求值,δadas表示辅助驾驶系统方向盘转角的控制请求量;
57、第一拟制单元,用于若所述辅助驾驶模式由待机切换到激活符合切换拟制条件,则表示所述辅助驾驶模式由待机切换到激活状态存在抑制条件;
58、第一决策单元,用于若所述辅助驾驶模式由待机切换到激活不符合切换拟制条件,则表示所述辅助驾驶模式由待机切换到激活状态不存在抑制条件。
59、较佳地,所述第二决策模块具体包括:
60、获取单元,用于获取所述辅助驾驶模式处于激活状态的信号;
61、识别单元,用于根据左转向灯或右转向灯被激活状态识别出所述驾驶员的转向意图;
62、第二判断单元,用于判断所述驾驶员的转向意图是否符合第一换道可行性拟制条件;其中,所述第一换道可行性拟制条件为:①驾驶员请求换道方向的车道数量不小于1,②驾驶员请求换道方向的车道线具有可见性,③驾驶员请求换道方向的车道线线型为可换道类型,三个命题同时成立,表示为:
63、c21=(nlc≥1)∧(vislc=1)∧(ltlc=1)
64、式中,若c21为真命题,则表示换道不符合换道可行性拟制条件,否则表示符合换道可行性拟制条件;nlc表示驾驶员请求换道方向的车道数量;vislc表示驾驶员请求换道方向车道线的可见性,且vislc∈{0,1},其中0和1分别表示不可见和可见;ltlc表示驾驶员请求换道方向车道线类型的可换道性,且ltlc∈{0,1},其中0和1分别表示不允许换道线型和允许换道线型;
65、第二决策单元,用于若所述驾驶员的转向意图符合第一换道可行性拟制条件,则直接决策所述自车的运动模式为横向运动模式;
66、第三决策单元,用于若所述驾驶员的转向意图不符合第一换道可行性拟制条件,则决策所述自车的运动模式处于横纵向综合运动状态;
67、较佳地,所述第二决策模块具体还包括:
68、第三判断单元,用于判断处于横纵向综合运动状态的所述自车是否符合第二换道可行性拟制条件;其中,所述第二换道可行性拟制条件为:①自车所在车道两侧车道线不完全可见,②无前车或有前车但自车车速高于设定阈值,两个命题同时成立,表示为:
69、c22=(visl+visr≤1)∧((npv=0)∨((npv>0)∧(v>v0)))
70、式中,若c22为真命题,则表示符合第二换道可行性拟制条件,否则表示不符合第二换道可行性拟制条件;visl和visr分别表示自车所在车道左、右侧车道线的可见性,visl和visr∈{0,1},其中0和1分别表示不可见和可见;npv表示自车所在车道前方的车辆数;v和v0分别表示自车车速和车辆可进行横向跟车的最大速度阈值;
71、第四决策单元,用于若处于横纵向综合运动状态的所述自车符合第二换道可行性拟制条件,则直接决策所述自车的运动模式为纵向运动模式;
72、第五决策单元,用于若处于横纵向综合运动状态的所述自车不符合第二换道可行性拟制条件,则直接决策所述自车的运动模式为横纵向综合运动模式。
73、第三方面,本技术提供了一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的智能辅助驾驶分层决策方法。
74、第四方面,本技术提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的智能辅助驾驶分层决策方法。
75、相比于现有技术,本技术提供的一种智能辅助驾驶分层决策方法、系统、电子设备及存储介质,具有以下有益效果:
76、1、在充分考虑驾驶员状态,并有效利用驾驶员操作意图推断驾驶员驾驶偏好的基础上,采用分层有限状态机实现辅助驾驶系统决策过程,可减少辅助驾驶系统状态间的频繁切换;从而实现在保证车辆辅助驾驶的安全性和舒适性前提的同时,提高驾驶员对智能辅助驾驶系统的接受度。
77、2、采用有限状态机方法实现辅助驾驶模式的工作状态、运动模式和驾驶行为的分层决策,算法逻辑清晰且结构完备,可解释性及可扩展性较好。随着功能状态不断增加,分层决策方法可减少不同辅助驾驶场景下状态之间的频繁切换,从而达到提高车辆行驶的舒适性的目的。
78、3、充分考虑驾驶员状态和驾驶员意图信息,当存在驾驶员状态异常或驾驶员介入意图较强时,系统将驾驶权交由驾驶员接管,达到保证车辆行驶安全的目的。根据驾驶员介入意图推断驾驶员驾驶偏好,进行车辆驾驶行为与驾驶员驾驶偏好的适应调整,达到提高驾驶员对辅助驾驶系统接受度的目的。
- 还没有人留言评论。精彩留言会获得点赞!